Изобретение относится к сборочньп автоматам и может быть использовано Б лю-бой отрасли машиностроения, где есть необходимость в сборке резьбовых соединений типа винт-планка с резьбовыми отверстиями.
Из|вестны роторные автоматы для сборки резыбовых соединений, содержащие непод)виж1ное основание, лоток для подачи винтов, механизм подачи лланок ic резьбовьими отверстиями, «опирЫ, взаимодействующие с механизмом лодачи и совмещающие элементы резьбовых соединений, и сборочную головку со шлииделями.
Однако они не обеспечивают одновре.менного наживления и завертывания двух винтов с щайбами в 1резыбовые отверстия «онтактны.х 1планок, И меющих прямоугольную форму и малое межцентровое расстояние между отверстиями. Такая операция производится вручную и является малопроизводительной.
Целью изобретения Я1вляется повыщение производительности труща. Это достигается тем, ЧТО .предлагаемый автомат снабжен закрепленной на роторе и вытнуто-й под некоторым углом к лотку плоской пружиной с радиусными каналами, удерживающей винтьг в рабочем положении, паправляющей и подающей их (К резьбовым отверстиям планок, радиусными сегментами, неподвижно закрепленными на основании, подпружиненными в
вертикальном на пра1влении пальцами, расположенными соосно со шпинделями и осуществляющими центрирование резьбовых отверстий планок, и заслонкой для перекрытия радиуоных каналов плоской тиружины, а щ.пиндели имеют упругие элементы, получающие реверсивное вращение от радиусных сегмеигов п воздействующие на головки винтов таким образом, что обеспечивается заход винтов в резьбовые отверстия планок, наживление и завертывание их.
Упругие элементы шпинделей могут быть выполнены в виде резиновых втулок, имеющих на рабочих поверхностяХ армированные
пластинки, самоустанавливающие1ся в шлицах винтов.
На фиг. 1 изображены элементы резьбового соединения; на фиг. 2 - общий вид предлагаемого автомата, разрез; па фиг. 3 - то
же, вид сверху н разрез А-А; на фиг. 4 - взаимодействие упругого шпинделем с радиусными сегментами.
Резьбовое соединение состоит из винтов }, шайб 2 и контактной нланки 3.
Автомат содержит неподвижное основание 4, ротор 5, свободно вра щающийся в радиальном подшипнике 6 и па упорных валиках 7, и механизм подачи пл-анок с резьбовыми отверстиями, состоящий из наклонного
под планку, соеднненпых между собой пружиной 10 1прн помощи осей с роли-ками 11.
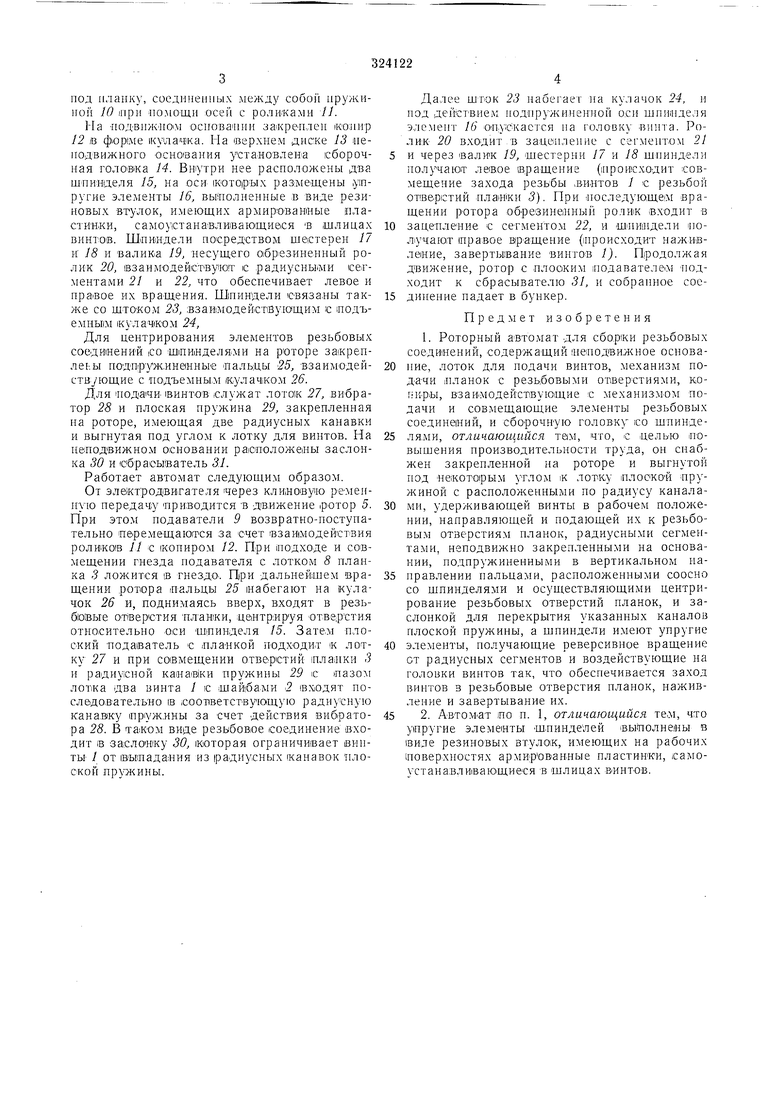
Ма fioA-Bii/KHOiM о.спова1пии за креплен КОлнр 12 ;в фор1ме кулачка. На верхнем диске 13 неподвижного основания установлена сборочная голоет а 14. Внутри нее расположены два Шпииделя 15, на оси которых размещены упругие элементы 16, выполненные в виде резиновых вгулок, имеющих армированные пластинки, самоуютана-вливаювдиеся в шлицах BHHTOiB. Шлиидели посредством шестерен 17 и 18 и валика 19, несущего обрезиненный ролик 20, взаимодействуют с радиусны.ми сегментами 21 и 22, что обеспечивает левое и npaiBoe их вращения. Шпиннели связа.нн также со щтоком 23, взаимодействующим с подъем пы(м 1кулач1ком 24,
Для центрирования элементов резьбовых соедииений со Щ|НИ|Нделя ми на роторе зажрепле -, ы подПруж.инанныб л а льды 25, взаимодействующие с подъемным кулач1ком 26.
Для тшдачИ1ВИНТОВ служат лоток 27, вибратор 28 и плоская пружина 29, закрепленная на роторе, имеющая две радиусных канавки и выгнутая под углом к лотку для винтов. На не1подвижном основании расколоже|Ны заслонка 30 и сбрасы.ватель 31.
Работает автомат следующим образом.
От эле1ктродвИ|Гателя через клИ|Нову1ю ре меннуто передач;у приводится в движение ротор 5. При этом подаватели 9 возвратно-поступательно перемещаются за счет взаимодействия роликов 11 с (кониром 12. При подходе и совЛ1ещении гнезда подавателя с лотком 8 планка 3 ложится 1В гнездО. При дальнейшем вращении ротюра Цальцы 25 набегают на кулачок 26 и, поднимаясь вверх, входят в резьбювые от1вер1стия планки, центрируя отверстия относительно оси щиинделя 15. Зате.м плоский подаватель с плапкой подходи т « лотку 27 и при совмещении отверстий 1пла1нки 3 и радиусной каа-гавки пружины 29 с пазом лот1ка два винта I с шайбами 2 входят последовательно IB 1соот(ветствующую радиусную Канавку пружины за счет действия внбратора 28. В TaiKOM виде резьбовое соединение входпт IB засловдку 30, которая ограничивает винТЫ / от |выпада;ния из радиусных канавок плоской пружины.
Далее щгок 23 набегает на кулачок 24, и под действием подпружиненной оси щпипделя элемент 16 оП;уса ;ается на головку винта. Ролик 20 входит в заце пление с сегментом 21 И через валик 19, шестерни 17 и 18 щпиндели получают левое вращение (1прои сходит ;совмещение захода резьбы .винтов / с резьбой отверстий планки 3). При последующем вращении ротора обрезинемный ролик входит в
зацепление с сегментом 22, и Ш1НИ1Ндели поЛучают правое вращение (|нроисходит наживление, завертывание винтов /). Продолжая движение, ротор с плоским подавателем подходит к сбрасывателю 31, и собранное соединепие падает в бункер.
Предмет изобретения
1. Роторный автомат для сборки резьбовых соединений, содержащий неподвижное основапие, лоток для подачи винтов, механизм подачи планок с резьбовыми отверстиями, ко.иры, взаимодействующие с механизмом подачи и совмещающие элементы резьбовых соединений, и сборочную головку со шпинделя.ми, отличающийся те1М, что, с целью повыщения производительности труда, он снабжен закренленной на роторе и выгнутой под некоторым утлом к лотку плоской пружиной с расноложеннымп по радиусу каналаМП, удерживающей винты в рабочем положении, направляющей и подающей их к резьбовым отверстиям планок, радиусными сегментами, неподвижно закрепленными на основании, по.п,пружиненными в вертикальном направлении пальцами, расноложепными соосно со шпинделями и осуществляющими центрирование резьбовых отверстий нланок, и заслонкой для перекрытия указанных каналов плоской пружины, а шпиндели имеют упругие
элементы, получающие реверсивпое вращепие от радиусных сегментов и воздействующие на головки винтов так, что обеспечивается заход винтов в резьбовые отверстия планок, наживлепие и завертывание их.
2. Автом ат по п. 1, отличающийся тем, что упругие элементы шпинделей выполнены в виде резиновых втулок, имеющих на рабочих поверхностях армированные пластинки, само ттанавли1вающиеся в шлицах в-интов.
m
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СБОРКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 1998 |
|
RU2149092C1 |
| МНОГОПОЗИЦИОННЫЙ АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1972 |
|
SU435915A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU1009692A1 |
| АВТОМАТ ДЛЯ СБОРКИ БОЛТОВ С ШАЙБАМИ | 1971 |
|
SU426786A1 |
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1703349A1 |
| Устройство для сборки деталей | 1972 |
|
SU440232A1 |
| РАБОЧАЯ ГОЛОВКА СТАЦИОНАРНОГО УСТРОЙСТВА ДЛЯ СБОРКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 1971 |
|
SU291775A1 |
| Питатель | 1981 |
|
SU996042A2 |
| УСТРОЙСТВО для ОРИЕНТИРОВАННОЙ ПОДАЧИ ВИНТОВ | 1972 |
|
SU347155A1 |
| СБОРКИ РЕГУЛЯТОРА НАТЯЖЕНИЯ ВЕРХНЕЙ НИТИ ШВЕЙНОЙ МАШИНЫ | 1972 |
|
SU352739A1 |


Y///Z
жш
