1
Изобретение относится к устройствам для эксплуатационных испытаний самоходных машин и может быть использовано в системах автоматического вождения, например тракторов.
По основному авт. св. № 324969 известно устройство для измерения курсового угла самоходных машин, содержашее токонесуший провод, индукционный датчик с опорным усилителем и фазовый детектор, продольная ось датчика совмещена с направлением движения машины, а опорный усилитель охвачен системой автоматического регулирования усиления.
Недостатком известного устройства является влияние побочных лепестков диаграммы направленности индукционного магнитоприемвика на точность измерения.
Для повышения точности измерения курсового угла на значительных .расстояниях от токонесушего провода предлагаемое устройство содержит два вертикально ориентируемых магнитоприемника, устанавливаемых на продольной оси движения самоходной машины и соединенных с сумматором и далее с управляемым делителем.
На фиг. 1 .показана схема взаимного расположения самоходной машины и токонесуш,его провода, определяюш,его базовую линию, а также схема расположения индукционных
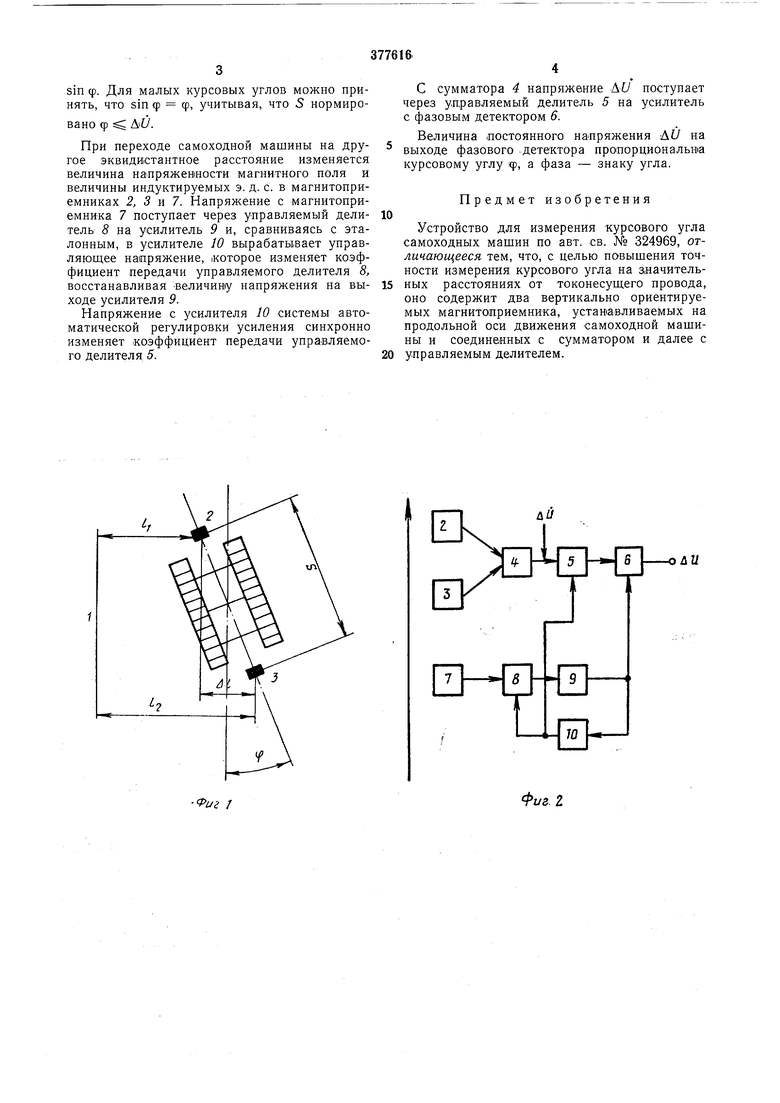
магннтоприемников на самоходной машине; на фиг. 2 - блок-схема устройства.
Базовая линия определяется токон1есуш,им проводом 1 (фиг. I). Индукционные магнитоприемники 2 к 3 устанавливают на продольной оси движения самоходной машины и соединяют с сумматором 4. Напряжение Af/ с сумматора 4 через управляемый делитель 5 поступает на усилитель с фазовым детектором 6. Магнитоприемник 7 опорного усилителя соединен с управляемым делителем 8, далее с опорным усилителем 9. Напряжение с опорного усилителя 9 поступает на фазовый детектор 6 и усилитель 10 системы автоматической регулировки. Выход усилителя 10 соединен с управляемыми делителями 5 и S.
Нри движении самоходной машины параллельно токонесуш;ему проводу (курсовой угол Ф 0) расстояния /1 4 и величины индуктируемых э. д. с. в магнитоприемниках 2 и 3 равны, напряжение на выходе сумматора равно нулю.
При движении под углом к токонесуш,ему проводу (/1 4) индуктируемые э. д. с. в магнитонрнемниках 2 и 5 не равны, и на выходе
сумматора 4 появляется напряжение AU, пропорциональное разности расстояния А/. Ееличин1а А/, отнесенная к разности 5 магнитоприемников 2 и 3 на самоходной машине, равна
sin ф. Для малых курсовых углов можно принять, что sin ф ф, учитывая, что 5 нормировано ф : ЛУ.
при переходе самоходной машины на другое эквидистантное расстояние изменяется величина напряженности магнитного поля и величины индуктируемых э. д. с. в магнитоприемниках 2, 3 ц 7. Напряжение с магнитоприемни а 7 поступает через управляемый делитель 8 на усилитель 9 и, сравниваясь с эталонным, в усилителе 10 вырабатывает управляющее напряжение, iKOTOpoe изменяет коэффициент передачи управляемого делителя 8, восстанавливая Беличиву напряжения на выходе усилителя 9.
Напряжение с усилителя 10 системы автоматической регулировки усиления синхронно изменяет коэффициент передачи управляемого делителя 5.
С сумматора 4 напряжение AU поступает через управляемый делитель 5 на усилитель с ф|азовым детектором 6.
Величина постоянного напряжения AU на выходе фазового .детектора пропорциональна курсовому углу ф, а фаза - знаку угла.
Предмет изобретения
Устройство для измерения курсового угла самоходных машин по авт. св. № 324969, отличающееся тем, что, с целью повышения точности измерения курсового угла на значительных расстояниях от токонесуш,его провода, оно содержит два вертикально ориентируемых магнитоприемника, устанавливаемых на продольной оси движения самоходной машины и соединенных с сумматором и далее с
управляемым делителем.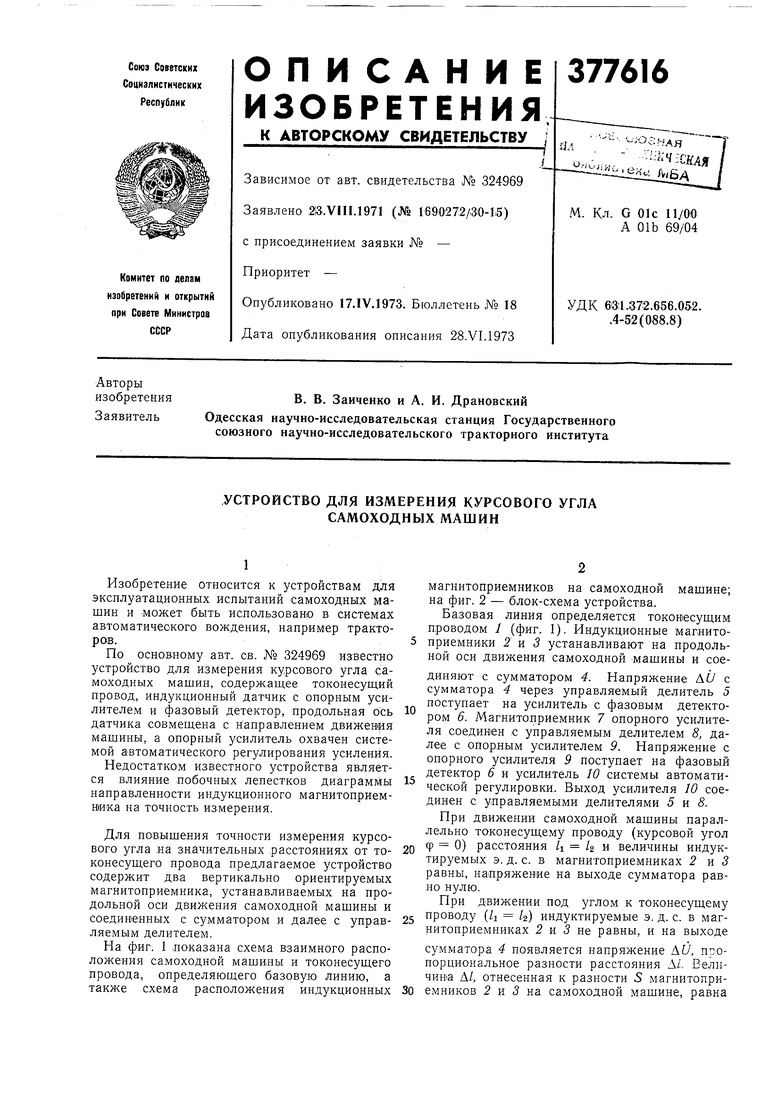
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КУРСОВОГО УГЛА САМОХОДНОЙ МАШИНЫ1^СВСОЮЗНАЯ- '••-• ---"^'i^m | 1972 |
|
SU324969A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1973 |
|
SU385548A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ МАШИН ПО ТОКОНЕСУЩЕМУПРОВОДУ | 1972 |
|
SU345890A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1987 |
|
SU1531874A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ АГРЕГАТОВ | 1973 |
|
SU399219A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Способ определения координат инженерных металлических коммуникаций и устройство для его осуществления | 1986 |
|
SU1318957A1 |
