1
Изобретение относнтся К области сельского хозяйства и может быть использовано для автоматического направления движения сельскохозяйственных arperaTOiB при комплексной автоматизации сельскохозяйственного производства.
Известно устройство для автоматического направления движения самоходных агрегатов по авт. св. № 323087, содержащее управляемый лТ.елитель сигнального усилителя и программный тиристор, задающий коэффициент передачи управляемого делителя в виде сту пенчатой функции.
Целью изобретения я вляется обеспечение а втоматической стабилизации статической зоны нечувствительности при изменении расстояния от токонесущего провода.
В предложенном устройстве статическая зона стабилизируется путем подачи управляющего .напряжения с выхода усилителя постоянного тока системы АРУ на управляемый делитель сигнального усилителя.
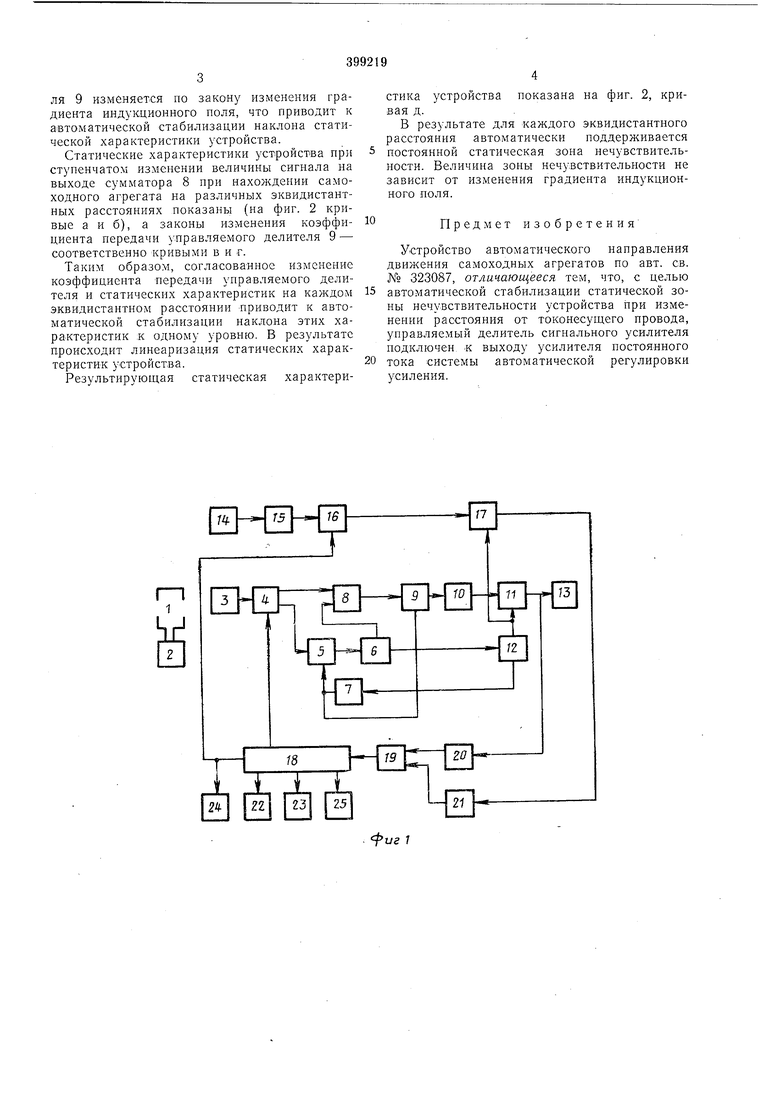
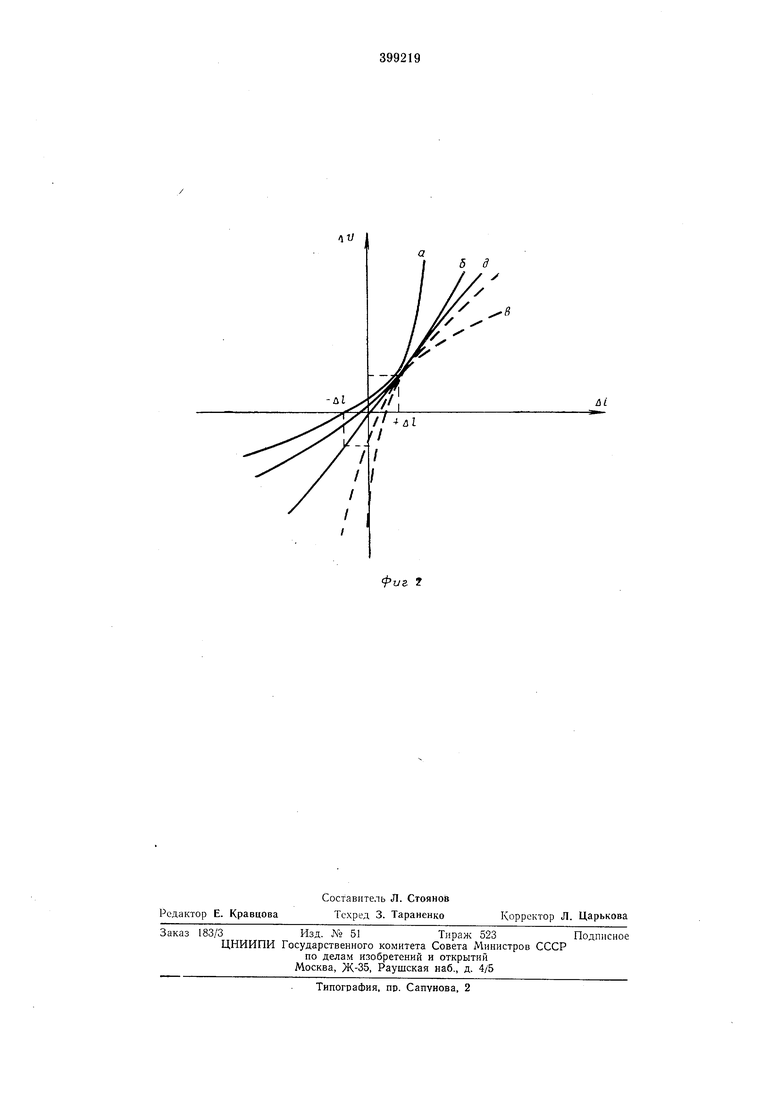
На фиг. 1 приведеиа блок-схема предложенного устройства; на фиг. 2 показана линеаризация статической характеристики устройства (±Д/ стабилизированная статическая .зона нечувствительности).
Устройство состоит из токонесущего провода 1, генератора 2 переменного тока, индукционного датчика 3, усилителя с управляемым делителем 4, управляемого делителя 5 системы АРУ, предварительного усилителя 6 опорного напряжения, усилителя 7 постоянного тока системы АРУ, сумматора 8, управляемого делителя 9 сигнального усилителя, сигнального усилителя 10, фазового детектора 11, усилителя опорного напряжения 12, сервопривода 13, индукционного датчика программного устройства 14, усилителя 15, управляемого делителя 16, фазового детектора 17, программного регистра 18, схемы совпадения 19, пороговых устройств 20 и 21, сервоприводов 22, 23, 24 и 25. Сумматор 8 соединен с управляемым делителем 9, на второй вход которого поступает управляющее напряжение с усилителя постоянного тока системы АРУ 7. Управляемый делитель соединен с сигнальным усилителем 10, выход которого соединен с фазовым детектором 11.
Прн движении самоходного агрегата на различных эквидистантных расстояниях величина сигнала на выходе сумматора 8 при смещении на зону нечувствительности устройства изменяется ступенчато и зависит от величины заданного эквидистантного расстояния из-за ступенчатого изменения программным регистром 18 коэффициента передачи управляемого делителя усилителя 4.
Коэффициент передачи управляемого делителя 9 изменяется по закону изменения градиента индукционного поля, что приводит к автоматической стабилизации наклона статической характеристики устройства.
Статические характеристики устройства при ступенчатом изменении величины сигнала на выходе сумматора 8 при нахождении самоходного агрегата на различных эквидистантных расстояниях показаны (на фиг. 2 кривые а и б), а законы изменения коэффициента передачи управляемого делителя 9 - соответственно кривылчи в и г.
Таким образом, согласоваииое изменение коэффициента передачи управляемого делителя и статических характеристик на каждом эквидистантном расстоянии приводит к автоматической стабилизации наклона этих характеристик к одному уровню. В результате происходит линеаризация статическиххарактеристик устройства.
Результирующая статическая характеристика устройства показана на фиг. 2, кривая д.
В результате для каждого эквидистантного расстояния автоматически поддерживается постоянной статическая зона нечувствительности. Величина зоны нечувствительности не зависит от изменения градиента индукционного поля.
Предмет изобретения
Устройство автоматического направления движения самоходных агрегатов по авт. св. № 323087, отличающееся тем, что, с целью автоматической стабилизации статической зоны нечувствительности устройства при изменении расстояния от токонесущего провода, управляемый делитель сигнального усилителя подключен К выходу усилителя постоянного тока системы автоматической регулировки усиления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| Устройство для автоматического управления движением самоходного агрегата | 1979 |
|
SU767710A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1973 |
|
SU385548A1 |
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1971 |
|
SU312560A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ МАШИН ПО ТОКОНЕСУЩЕМУПРОВОДУ | 1972 |
|
SU345890A1 |
П
рН--{4№Н
18
