Изобретение относится к электроламповой промышленности, в частности к устройствам, применяемым при сборке стартеров для люминесцентных ламп.
Известны полуавтоматы сборки стартеров, содержащие кулачково-роликовый привод, сообщающий прерывисто-вращательное движение столу с гнездами и возвратно-поступательное перемещение расположенным вокруг стола на станине рабочим органам и подвижным элементам узлов загрузки и выгрузки деталей стартеров.
Особенностью предложенного полуавтомата, обеспечивающей механизацию процесса сборки стартеров, является то, что он снабжен устройствами для досылки и калибровки корпуса стартера с одновременным разводом его усиков, устройством для подачи, формирования и досылки электроизоляционной прокладки во внутрь корпуса и узлами для предварительной и окончательной подгибки усиков корпуса стартера. При этом устройство для досылки и калибровки корпуса стартера с одновременным разводом его усиков выполнено в виде усеченного конуса, переходящего в цилиндр в верхней части, внутри которого размещен подпружиненный выталкиватель. Устройство для подачи, формирования и отрезки электроизоляционной прокладки выполнено в виде корпуса, установленного на
станине вне поворотного стола, с отверстием круглого сечения и пазом на его поверхности, в котором закреплена неподвижная часть ножа, а подвижный нож расположен в пазу,
перпендикулярном к неподвижному ножу, выполнен в виде пластинки прямоугольного сечения со скосом для образования режущей кромки, имеющим две направляющие колонки и пружину для обеспечения возвратио-поступательного перемещения подвижного ножа, и его привод связан с кулачком, расположенным на периферии поворотного стола. Для досылки отрезанной и сформированной изолирующей прокладки в корпусе стартера применен выталкиватель, жестко закрепленный на штоке. Кроме того, прерывистая подача электроизоляционного материала осуществлена через паз, где расположен неподвижный нож, с помощью подающих роликов, установленных на корпусе, причем ось ведущего ролика снабжена шестерней, входящей в зацепление с зубчатым сектором, насаженным на ведущий вал, получающий вращение от основного привода.
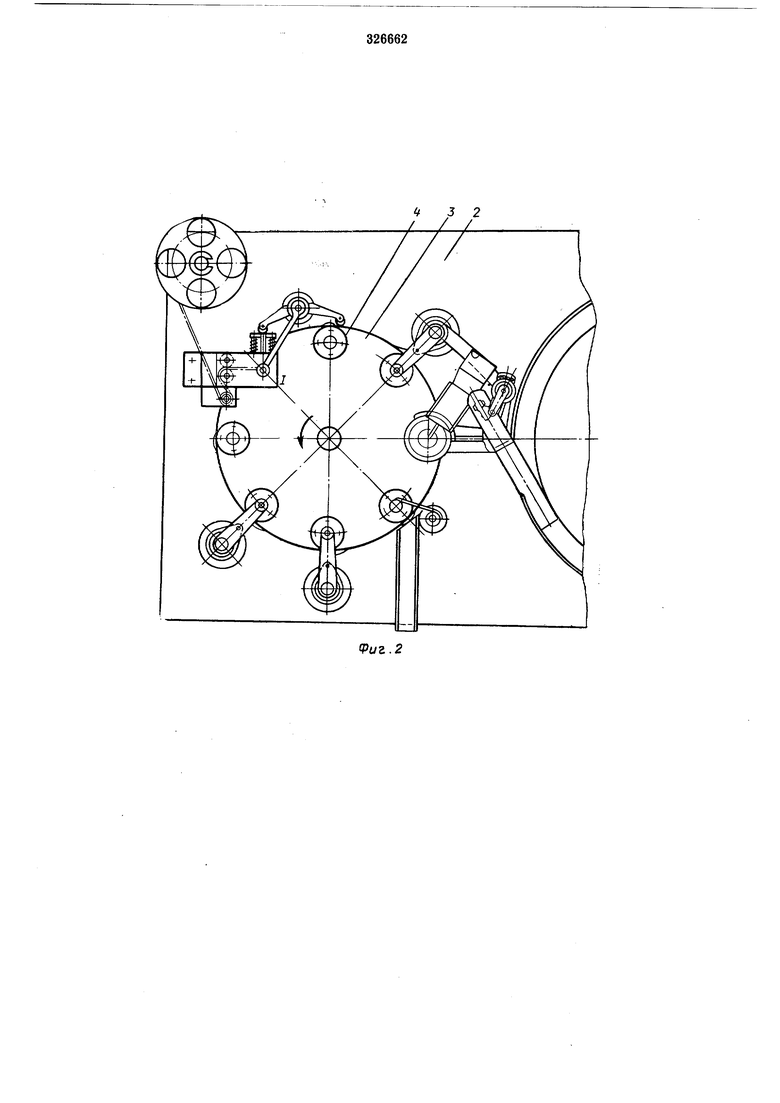
На фиг. 1 изображена кинематическая схема полуавтомата в изометрической проекции; на фиг. 2 - полуавтомат, вид в плане; на фиг. 3 и 4 - узел формирования и подачи электроизоляционной прокладки в двух проекпредварительной и окончательной подгибки усиков корпуса стартера.
Полуавтомат содержит вибробункер / для подачи корпусов стартера, станину 2, прерывисто вращающийся стол 3, на котором расположены гнезда 4 для установки и перемещения собираемых деталей стартера. Полуавтомат содержит также узел 5 механической пощтучной выдачи корпусов с отсекателями 6 и пружинами 7, служащими для возвращения отсекателя в исходное положение; узел 8 повторной, дублирующей нощтучной выдачи корпусов из накопителя, снабл :енный отсекателем 9, пружиной 10 и кулачком 11; узел 12 досылки корпуса стартера в позицию к его механической калибровки; узел /3 иодачи, формирования, отрезки и вставки изолирующего материала в корпус стартера; узлы 14 и 15 соответственно предварительной и окончательной подгибки усиков корпуса стартера; узел 16 съема собранного стартера.
Все узлы с рабочими инструментами расположены на станине 2 вокруг стола 3. Рабочие движения механизмов осуществляются от распределительных кулачковых валов /7. Поворотный стол 5 получает прерывистое вращение от кулачково-роликового механизма 18.
Узел 12 выполнен в виде цилиндра, переходящего в конус. Внутри цилиндрической части расположен подпружиненный выталкиватель 19. При движении щтока 20 вниз механизм опускается, и своей конической частью центрирует корпус стартера в позиции стола, а цилиндрической калибрует усики корпуса. При движении щтока вверх механизм поднимается. Ранее сжатая пружина воздействует на выталкиватель, который производит сброс корпуса стартера с конической части узла внутри позиции.
Узел 13 (фиг. 3 и 4) выполнен в виде корпуса 21, расположенного на станине за пределами поворотного стола, с отверстием 22 круглого сечения и пазом на его поверхности, в котором закреплена неподвижная часть ножа 23, равная высоте паза.
Подвижный нож выполнен в виде пластинки 24 прямоугольного сечения со скосом для образования режущей кромки, и его привод связан с кулачком, расположенным на периферии поворотного стола. Подвижный нож размещен в пазу, перпендикулярном неподвижному ножу, и снабжен двумя направляющими колонками 25 и возвратными пружинами 2.
Прерывистая подача электроизоляционного материала осуществляется через паз, где расположен неподвижный нож, с помощью подающих роликов 27, установленных на корпусе. Ось ведущего ролика снабжена щестерней 28, входящей в зацепление с зубчатым сектором, посаженным на ведущий вал, получающий вращение от основного привода. Досылка отрезанной изолирующей прокладки в корпусе стартера осуществляется выталкивателем, жестко закрепленным на щтоке.
Боковая прокладка из электроизоляционного материала, сматываясь с катушки, протягивается через направляющий ролик 29 тянущими роликами и подается в формирующее отверстие, где производится свертывание ее в виде цилиндра. Нож, получив движение через систему рычагов 30 (фиг, 2) и кулачок //, производит отрезку прокладки. В исходное положение нож возвращается благодаря пружинам 31. С помощью выталкивателя 32, получающего движение через шток 33 и распределительный вал П, производится выталкивание прокладки из формирующего отверстия в корпусе стартера, находящегося в позиции IV.
Узел 14 (фиг. 5) выполнен в виде цилиндра 34, внутри которого имеется внутренний конус 55. При движении узла вниз с помощью этого конуса осуществляется нажим на усики корпуса стартера. При движении узла вверх
корпус освобождается от конуса, а усики его остаются подогнутыми.
Узел 15 (фиг. 6) состоит из корпуса 36, цанги 57 и возвратной пружины 58. При движении узла вниз цанга прижимается к предварительно подогнутым усикам, а при дальнейшем нажатии лепестки цанги сжимаются и, проскальзывая торцом цанги по усикам корпуса, окончательно подгибают их.
Предмет изобретения
1.Полуавтомат для сборки стартеров, содержащий кулачково-роликовый привод, сообщающий прерывисто-вращательное движение столу с гнездами и возвратно-поступательное перемещение расположенным вокруг стола на станине рабочим органам и подвижным элементам узлов загрузки и выгрузки деталей стартеров, отличающийся тем, что, с целью
механизации процесса сборки стартеров, он снабжен устройствами для досылки и калибровки корпуса стартера с одновременным разводом его усиков, устройством для подачи, формирования и досылки электроизоляционной прокладки во внутрь корпуса и узлами для предварительной и окончательной подгибки усиков корпуса стартера.
2.Полуавтомат по п. 1, отличающийся тем, что устройство для досылки и калибровки
корпуса стартера с одновременным разводом его усиков выполнено в виде усеченного конуса, переходящего в цилиндр в верхней части, внутри которого размещен подпружиненный выталкиватель.
3. Полуавтомат по пп. 1 и 2, отличающийся тем, что устройство для подачи, формирования и отрезки электроизоляционной прокладки выполнено в виде корпуса, установленного на станине вне поворотного стола, с отверстием круглого сечения и пазом на его поверхности, в котором закреплен неподвижный нож, а подвижный нож расположен в пазу, перпендикулярном к неподвижному ножу, выполнен в виде пластинки прямоугольнощей кромки, имеющим две направляющие колонки и пружину для обеспечения возвратнопоступательного перемещения подвижного ножа, и его привод связан с кулачком, расноложепным на периферии поворотного стола, а для досылки отрезанной и сформированной изолирующей прокладки в корпусе стартера применен выталкиватель, жестко закрепленный на щтоке.
4. Полуавтомат по пп. 1-3, отличающийся тем, что прерывистая подача электроизоляционного материала осуществлена с помощью подающих роликов, установленных на корпусе, через паз, в котором закреплен неподвижный нож, причем ось ведущего ролика снабжена щестерней, входящей в зацепление с зубчатым сектором, насаженным на ведущий вал, получающий вращение от основного привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления и установки электроизоляционной прокладки в корпус стартера | 1974 |
|
SU567187A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ БОБИН С ШЕЛКОМ В БУМАГУ | 1968 |
|
SU217264A1 |
| Полуавтомат для закладки клиньев в пазы статора электрической машины | 1984 |
|
SU1354349A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ ЭЛЕКТРОЛИТИЧЕСКИХ | 1970 |
|
SU266958A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ПРОВОЛОЧНЫХ КОНТАКТОВ НА МОНТАЖНЫЕ ПЛАТЫ | 1971 |
|
SU301885A1 |
| АВТОМАТ ДЛЯ СБОРКИ ИГОЛЬЧАТЫХ ПОДШИПНИКОВ | 1970 |
|
SU425003A1 |
| ПОЛУАВТОМАТ ДЛЯ ПАЙКИ ДЕТАЛЕЙ В ВАКУУМЕ | 1968 |
|
SU221859A1 |
| АГРЕГАТ ДЛЯ ИЗГОТОВЛЕНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1966 |
|
SU187619A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |



Фь/г./
ФигМ
