Известен дистанционный копирующий манипулятор с воспроизведением усилия нагрузки задаюпдим органом на руке оператора, содержащий управляемые сервоприводами задающий и исполнительные органы, снабженные носледовательно соединенными звеньями с параллельными осями их поворота и датчиками нагрузки. Манипулятор снабжен специаль. ным вычислительным устройством, которое по положению звеньев манипулятора компенсирует сигнал веса исполнительного органа, что снижает точность управления.
Предложенный манипулятор отличается от известного тем, что на каждом звене исполнительного или задающего органа установлен акселерометр с осью чувствительности, перпендикулярной плоскости, проходящей через центр тяжести и ось иоворота звена, причем все акселерометры связаиы с суммирующим устройством электронного усилителя, служащего для управления приводом воспроизведения усилия нагрузки на задающем органе.
Такое выполнение манипулятора повышает точность его управлепия.
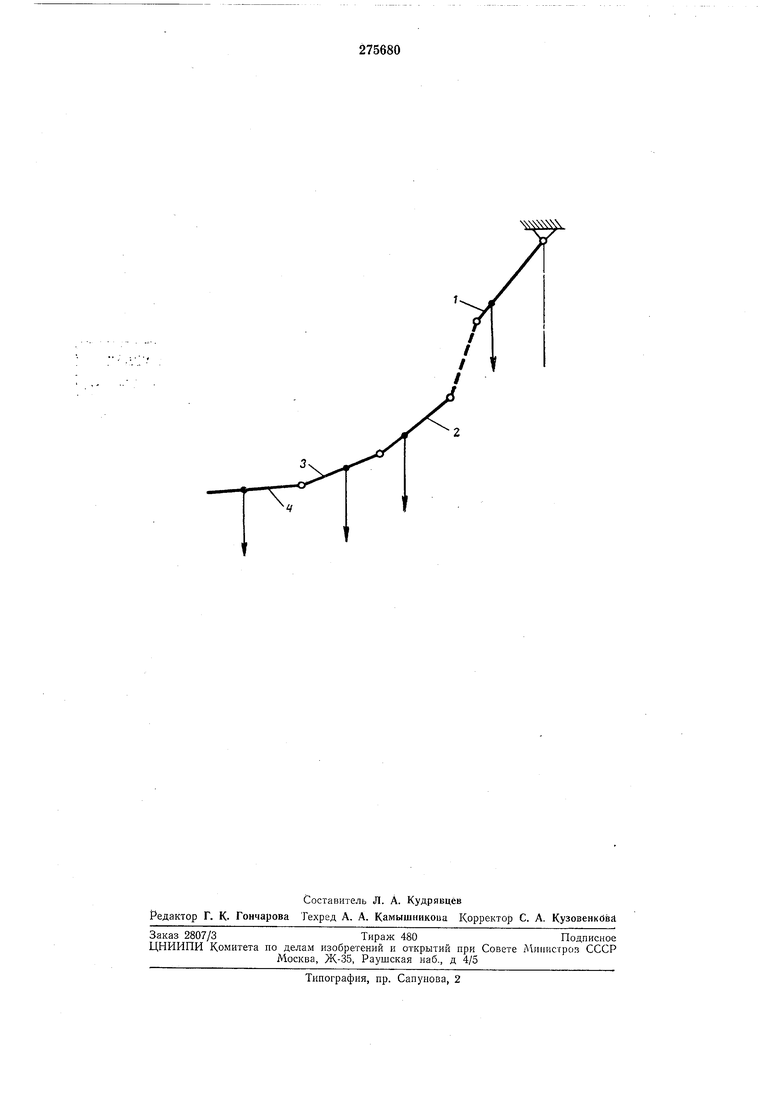
На чертеже дана кинематическая схема задающего или исполнительного органа манииулятора.
акселерометр (на чертеже показан), ось чувствительиости которого расположена перпендикулярно нлоскости, проходящей через центр тяжести и ось поворота звена. Все акселерометры связаны с суммирующим устройством электронного усилителя (на чертеже не показан), служащего для унравления прпводом воспроизведения усилия нагрузки на задающем органе.
Предмет изобретения
Дистанциопный копирующий манииулягор с воспроизведением усилия нагрузки задающим
органом на руке оператора, содержащнй управляемые сервоприводами задающий и исполнительные органы, снабженные иоследовательно соединенными звеньями с параллельными осями их поворота и датчиками нагрузки, отличающийся тем, что, с целью иовышения точности управления, на каждом звене исполнительного или задающего органа установлен акселерометр с осью чувствительности, перпендпкулярной нлоскости, проходящей через
центр тяжести и ось иоворота звена, причем все акселерометры связаны с суммирующим устройством электронного усилителя, служащего для управления приводом воспроизведения усилия нагрузки на задающем органе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
| ЗАХВАТ ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1971 |
|
SU290825A1 |