Изобретение относится к области автомат)ческого управления и предназначе о для использования в системах управления маиипуляторами различного назначения.
Известны дистанционные манипуляторы, содержащие задающий и исполиите.тьиык орган с датчиками нагрузки, выходы которых подключены ко входу системы воспроизведения нагрузки и систему управления исполин тельным органом по положению.
С целью овыщения точности работы предлагаемый дистанционный манипулятор содержит кинематически иодобпую физическую модель исполнительного органа с датчиками иагрузкн, выходы которых подсоединены к системе воспроизведения нагрузки, а управляемые входы - к выходам системы управления исполнительным органом по положению, причем физическая модель исиолпигельного органа установлена на общем основании с исполнительным органом.
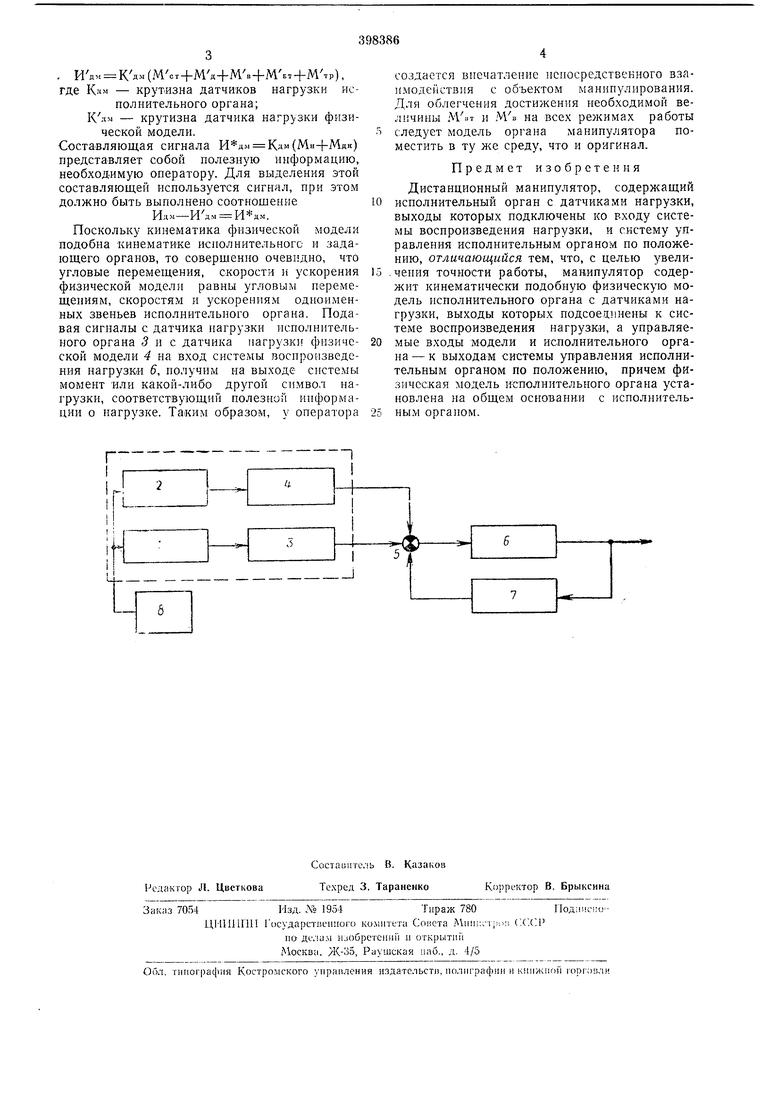
На чертеже представлена фуикциоиальная схема нредлагаемого манипулятора: исполнительный орган манипулятора 1. ккнематически подобная физическая модель исполпктельного органа 2, датчик нагрузки исполнительного органа 3, датчик нагрузки модели -/, сравнивающий элемент 5, система воспроизведения нагрузки 6, датчик обратной связи 7
II система управления
исполнительным
органом по положению 8. Манипулятор работает следующим образо.м. Как нзвестно, .момент сопротивления, возникающий в любом суставе манип)лятора, в общем случае описывается вырал-сеиием Мсо„р Л-Ь,+Мд„+Мст+Мд+Мв-|-ЛЬ,,-, 1де Мн - oмeит статической нагрузкн, создаваемой объектом манипулирования; .лн - динамический момент нагрузки, создаваемый объектом манпиулнроваИ Я;
AV г - статический момепт неуравноверлеииостп конструкцнн манипулятора;
.Мл - - динамический момент конструкции манипулятора;
.
момепт от вьггалкивающих (архимедовых) сил среды;
.,-. -- момеит вязкого трения; .. момент сухого трения. .Момеиг соиротивления в суставе физической модел может быть записан в виде
Мг„„р :.:М,-{-Мл-1.-М„+М.-.+ЛГтр. Штрих иоказывает, что соответствуюиии момепт относится к физической модели.
Сигналы датчиков нагрузки (момента) иопольительного органа и ф зической модели с1П1сываются выражениями
Илм Кд-., (Мн + Млн+Л ст-4-Л1д+Л г + ,„ +Мт,.)
, Идм Кд-(Мот+Мя + Мв+МЕТ+Мтр),
где Кг(м - крутизна датчиков нагрузки исполнительного органа; Кял - крутизна датчика нагрузки физической модели.
Составляющая сигнала (Ма+Мдн) представляет собой полезную информацию, необходимую оператору. Для выделения этой составляющей используется сигнал, при этом должно быть выполнено соотношение
Идм-Идм .
Поскольку кинематика физической модели подобна кинематике исполнительного и задающего органов, то совершенно очевидно, что угловые перемещения, скорости и ускорения физической модели равны угловым перемещениям, скоростям и ускорениям одноименных звеньев исполнительного органа. Подавая сигналы с датчика нагрузки исполнительного органа 3 и с датчика нагрузки физической модели 4 на вход системы воспроизведения нагрузки б, получим на выходе системы момент или какой-либо другой нагрузки, соответствующий полезной информации о нагрузке. Таким образом, у оператора
создается впечатление непосредственного вза1 модействия с объектом манипулирования. Для облегчения достижения пеобходимой величины Мит и Мв на всех режимах работы следует модель органа манипулятора поместить в ту же среду, что и оригинал.
Предмет изобретения
Дистанционный манипулятор, содержащий
исполнительный орган с датчиками нагрузки, выходы которых подключены ко входу системы воспроизведения нагрузки, и систему управления исполнительным органом по положению, отличающийся тем, что, с целью увеличения точрюсти работы, манипулятор содержит кинематически подобную физическую модель исполнительного органа с датчиками нагрузки, выходы которых подсоединены к системе воспроизведения нагрузки, а управляемые входы модели и исполнительного органа - к выходам системы управления исполнительным органом по положению, причем физическая модель исполнительного органа установлена на общем основании с исполиительным орга1юм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| СУСТАВ МАНИПУЛЯТОРА | 1972 |
|
SU428935A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 1970 |
|
SU275680A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
.J
