Известен схват задающего органа диетаицнонного коннрующего манипулятора, выполненный в виде рукоятки с подвижно скобой, снабженной датчи ом угла.
Описываемое устройство отл 1чается от 3вестного те, что выполнена с осью вращения, совпадающей с осью поворота пальцев в суставах между второй третьей фалангами.
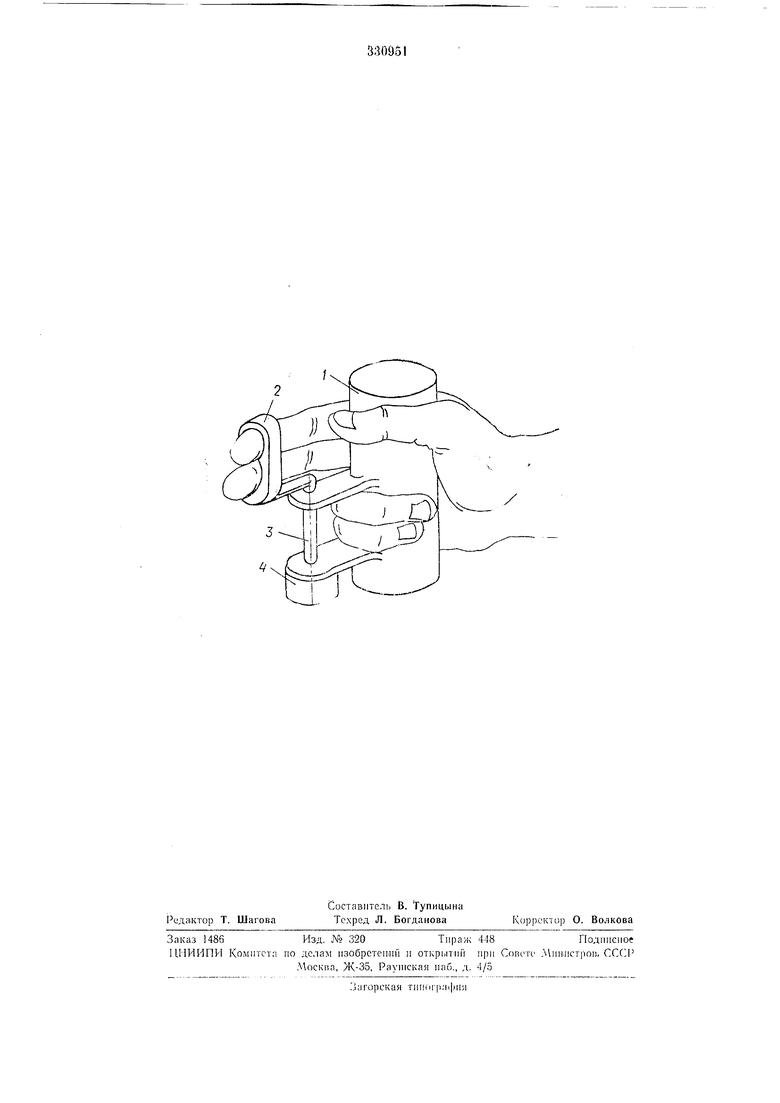
На чертеже представлен оп сываемый схват задающе -о органа.
Он меет рукоятку /, подвижну 0 скобу 2, ось 3 и угла 4.
Поворот скобы вокруг ОС, е которой жест со связан ротор угла, привод 1т к 1змененню велнч нь с гнала , подаваемого в с стему управлен Я пoлo/кeн e губок захвата нсполн 1тельного органа. Статор угла закреплен на ру оятке.
Предл ет i зоб ре тени я
Схват зада ощего органа д 1станц он Ю о копирующего ман пулятора, вынолненный в рукоятки с скобой, снабженной угла, отличающийся тем, что, с целью иовыщеН Я точности ман пул роБан Я удобства работы оператора со схватов, подв жная скоба выпол ена с осью вращен 1я, совпадающей с осью поворота пальцев в суставах между второй фалангами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| ИСКУССТВЕННАЯ КИСТЬ ДЛЯ ПРОТЕЗОВ-•-»•»- .— г л L.-' ! СогД | 1972 |
|
SU339078A1 |
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |
| МЕХАНИЗМ ДЛЯ УПРАВЛЕНИЯ ПИШУЩИМИ ГОЛОВКАМИ | 1971 |
|
SU320076A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ КИСТИИ ПАЛЬЦЕВ | 1972 |
|
SU428751A1 |