1
Изобретение относится к манипуляторам с дистанционным управлением и может быть использовано при создании задающего органа очувствленного дистанционного копируюа1его манипулятора.
Известны суставы задающих органов очувствленных манипуляторов, в которых для воспроизведения усилия нагрузки исполнительного органа на руке оператора используется специальный следящий привод релейного или линейного типа, причем усилие привода передается на руку оператора через упругий элемент, пружину или торсион, которые в совокупности ,с измерителем деформации являются также датчиком обратной связи в канале отражения усилий.
Недостатком суставов и схватов с указанными системами отражения усилий являются относительная сложность конструкции, требующая размещения в Суставе датчи1са-измерителя деформации уиругого элемента и обеснечения большой точности измерений, сложность системы управления приводом, когда в приводе релейного типа необходимо иметь линейное сравнивающее устройство на входе следящей системы и, наконец, сложность задачи обеснечения устойчивости многоконтурной замкнутой системы, включающей канал управлепия положением, канал отражения уснлня ii человека-оператора с его
зрительными и тактильно-мышечными связями. Кроме того, при отслеживании изменяющейся иагрузки в релейном нриводе и любой нагрузки в линейном приводе неизбежны затраты энергии при работе двигателей приводов.
Таким образом, целью изобретения является упрощение конструкции сустава задающего органа и его системы унравления, снижение веса и потребляемой энергии и облегчение задачи обеснечения устойчивости замкнутого контура управления манинулятора.
Предлагаемое изобретение отличается от известного тем, что нлоская пружина, выполняющая роль упругого элемента, помещеЕШ внутри паза подвижной скобы схвата, причем один конец плоской пружины расположен между упорами с зазором, а другой жестко соединен с фиксируемой частью фиксатора,
установленного таким образом, что в отключенном состоянии его фиксируемая часть имеет возможность свободного вращения вместе со скобой, а во включенном состоянии фиксатора - жестко связана с рукояткой схвата.
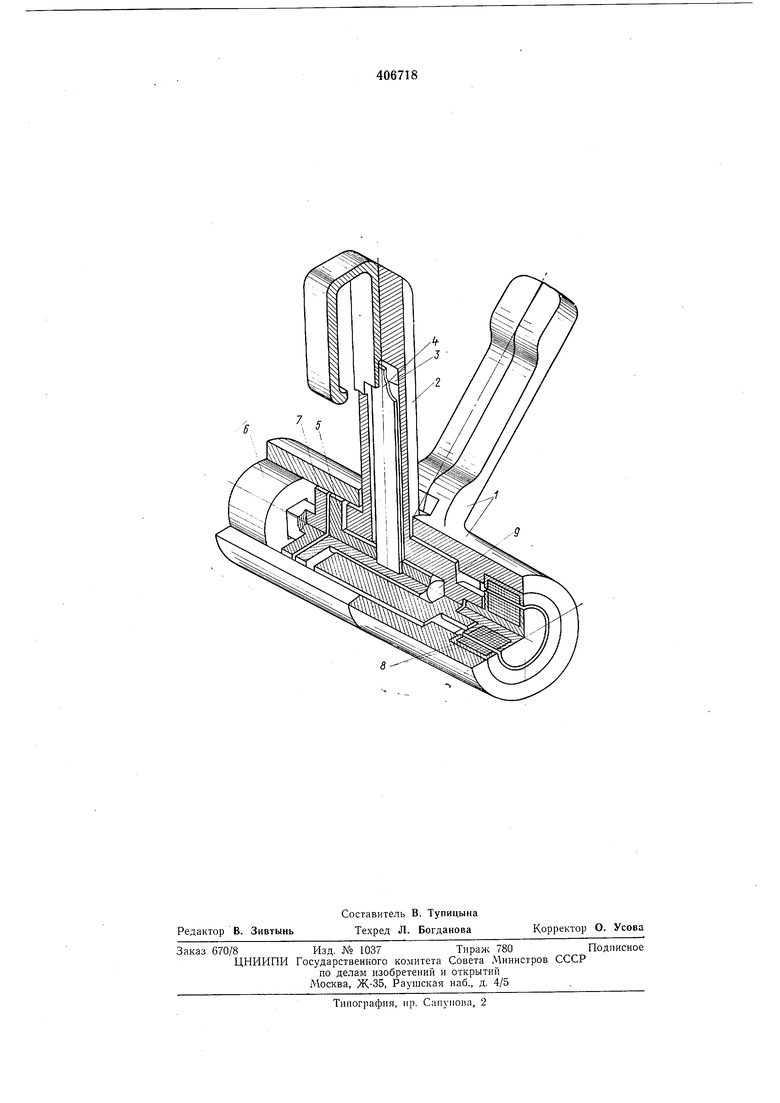
На чертеже изображен схват задающего органа очувствленного дистанционно-копирующего манипулятора, состоящий из рукоятки 1 с разъемным корпусом, подвижной скобы 2 с упором 3, имеющей наз, в котором номещена нлоская пружина 4, выступаюпщм концом
соединенная с фиксируемой частью 5 фиксатора 6, имеющего фиксирующий элемент 7. С подвижной скобой 2 соединен ротор 8 датчика угла, статор, которого установлен в корпусе рукоятки 1, при этом в нолости скобы установлен подпятник 9.
Относительно рукоятки 1 оператор свободно перемещает подвижную скобу 2 при выключенном фиксаторе 6, не ощущая усилий сопротивления (кроме сил трения) в кинематических парах. Датчик угла 8, ротор которого связан со скобой 2,, а статор с рукояткой 1, вырабатывает сигнал, пропорциональный относительному углу их поворота, причем этот сигнал отрабатывается приводом исполнительного захвата. В том случае, если па пути исполнительных губок захвата встречается твердый предмет, датчик нагрузки исполнительного схвата вырабатывает сигнал, включающий фиксатор 6, в результате чего фиксирующая деталь 7 соединяется с фиксируемой деталью 5 и конец пружины 4 оказывается связанным с корпусом рукоятки 1. Оператор, продолжая движение скобы 2 в том же направлении, деформирует пружину 4 и ощущает отраженное сопротивление нагрузки, которое возрастает в приводе исполнительного органа линейно, как и сопротивление пружины в зависимости от приращения управляющего сигнала после соприкосновения с твердым объектом манипулирования. Фиксатор в этом случае управляется релейной системой от датчика нагрузки исполнительного захвата. Для получения оптимального эффекта в экономии энергии фиксирующий элемент отключенного фиксатора может иметь два устойчивых состояния - соединенное и разъединенное с фиксируемой деталью 5 - в этом случае управление фиксатором
производится с помощью триггерпой схемы.
Для уме1Нзщения мощности необходимой
для приведения фиксатора в действие между
одним из концов пружины 4 и фиксируемой
частью 5 фиксатора 6 установлена повьпнающая передача (на чертеже tie показана), при этом усилие фиксации уменьщается пропорционально ее передаточному числу.
Предмет изобретения
1.Схват задающего органа очувствленного дистанционного копирующего манипулятора, в рукоятке которого установлены подвижная скоба с нлоской пружиной, датчик угла и дистанционно-управляемый фиксатор, отличающийся тем, что, с целью упрощения конструкции и системы управления, плоская пружипа помещена в пазу подвнжной скобы и жестко соединена с фиксируемой частью фиксатора,
установленного в рукоятке таким образом, что в отключенном состоянии фиксатора его фиксируемая часть имеет возможность свободного вращения совместно со скобой, а во включенном состоянии фиксатора - жестко
связана с рукояткой схвата.
2.Схват по п. 1, отличающийся тем, что в рукоятке установлен фиксатор, имеющий в выключенном состоянии два устойчивых положения фиксирующей детали, соединенное
и несоединенное с фиксируемой деталью.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Система управления дистанционным манипулятором | 1975 |
|
SU582090A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |