Изобретение относится к области автоматического регулирования и может применяться в практике построения приборных следящих систем с двухфазными асинхронными микродвигателями.
Известны сервоприводы для приборных следящих систем переменного тока, в которых с целью устранения влияния квадратурной помехи на точностные и динамические характеристики системы либо применяют устройства для подавления квадратурной помехи, либо осуществляют фазирование двигателя так, чтобы фазовый сдвиг между напряжениями управления и возбуждения был как можно ближе к величине 90°. Последнее успешно реализуется, если квадратурная помеха не насыщает усилитель.
Однако в этом случае необходимо предъявлять жесткие требования к величине и стабильности фазового сдвига, вносимого электрическими цепями усилителя, что усложняет сервопривод и снижает его надежность.
Целью предлагаемого изобретения является упрощение сервопривода и улучшение точности фазирования напряжений. Это достигается путем использования в качестве напряжения возбуждения двигателя самой квадратурной составляющей, сигналы которой для конкретного датчика являются величиной постоянной или изменяются в неоольших пределах.
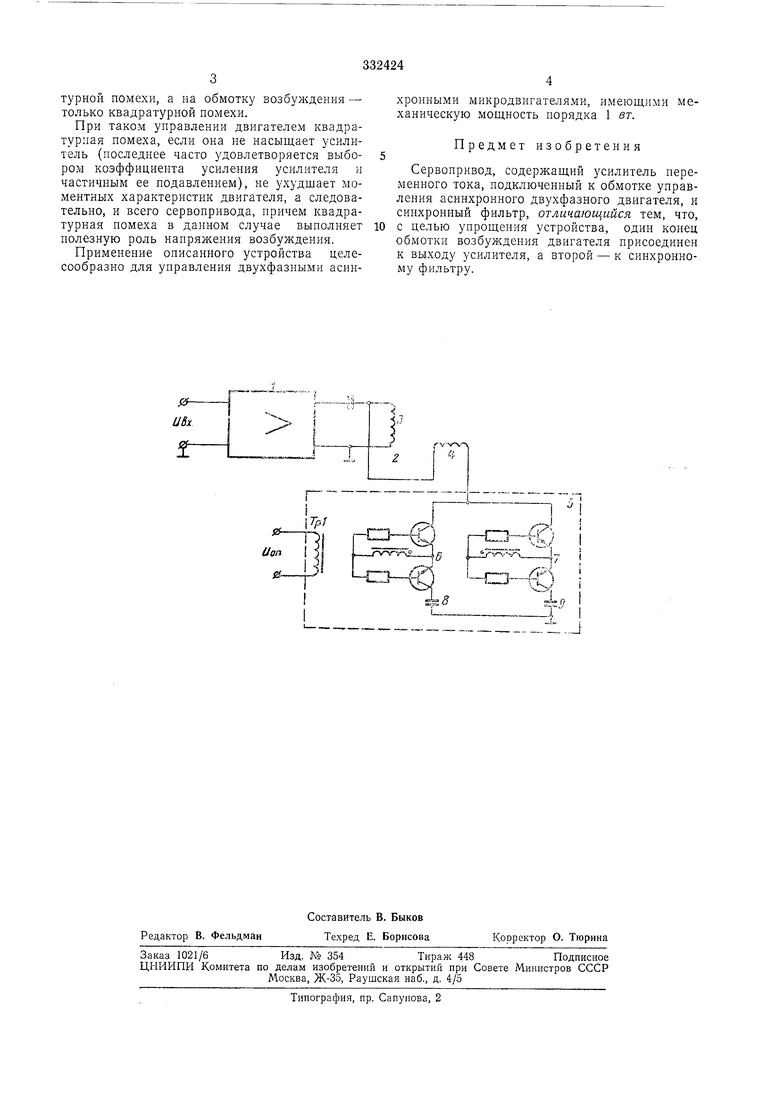
Принципиальная схема устройства приведена на чертеже.
Устройство состоит из усилителя 1 переменного тока асинхронного двухфазного двигателя 2, обмотка 3 управления которого подключена к выходу усилителя, а обмотка 4 возбуждения и одним концом также подсоединена к выходу усилителя, а другим - к си1 хронному фильтру 5, состоящему из двух транзисторных ключей , 7 и двух конденсаторов 8, 9.
Устройство работает следующим образом. Допустим, что на вход усилителя / подается сигнал, содержащий квадратурную помеху, и опорное напряжение синфазно с сигналом рассогласования, при этом квадратурная помеха не насыщает усилитель. Сигнал, усиленный усилителем, подается на обмотку 3 п через синхронный фильтр 5 на обмотку 4. Так как синхронный фильтр имеет большое сопротивление для сигналов, синфазных с опорным напряжением, и близкое к нулю для сигналов, сдвинутых на 90° (т. е. для квадратурной помехи), то почти все напряжение квадратурной помехи выделяется на обмотке 4 возбуждения. Таким образом, на обмотку управления действует напряжение рассогласования п квадратурной помехи, а на обмотку возбуладения - только квадратурной помехи.
При таком управлении двигателем квадратурная помеха, если она не насыщает усилитель (последнее часто удовлетворяется выбором коэффициента усиления усилителя и частичным ее подавлением), не ухудшает моментных характеристик двигателя, а следовательно, и всего сервопривода, причем квадратурная помеха в данном случае выполняет полезную роль напряжения возбуждения.
Применение описанного устройства целесообразно для управления двухфазными асинхронными микродвигателями, имеющими механическую мощность порядка 1 вт.
Предмет изобретения
Сервопривод, содержащий усилитель переменного тока, подключенный к обмотке управления асинхронного двухфазного двигателя, и синхронный фильтр, отличающийся тем, что, с целью упрощения устройства, один конец обмотки возбуладения двигателя присоединен к выходу усилителя, а второй - к синхронному фильтру.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕРВОУСИЛИТЕЛЬ | 1971 |
|
SU303620A1 |
| ДВУХКАНАЛЬНЫЙ СЕРВОПРИВОД | 1972 |
|
SU429412A1 |
| СЛЕДЯЩАЯ СИСТЕМА ПЕРЕМЕННОГО ТОКА | 1967 |
|
SU219663A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU365009A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1969 |
|
SU235140A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМДВИГАТЕЛЕМ | 1966 |
|
SU184968A1 |
| Магнитометр | 1984 |
|
SU1275338A1 |
| Синхронно-следящая система | 1956 |
|
SU119566A1 |
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
