(54) УСТГОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОГОМ ХИМИКО-ГАЛЬВАНИЧЕСКОЙ ЛИНИИ
1
Изобретение относится к устройствам логикопрограммного управления и может быть использовано & приборостроении для управления ; электромеханическими автооператорами химикогальванических линий, например, в производстве печатиых плат.
Известно устройство для управления автооператориыми линиями, содержащее датчики позиций, блок считываиия позиций, блок управления автооператором и блок поиска неиспргшного датчика 1.
Недостаток зтого устройства состоит в там, что используемый в нем метод контроля программы работы автооператора не обеспечивает обнаружение оишбок в работе последнего в случае выхода из -строя механнческой системы датчиков (например, при нарушении регулировки пластины-модулятора бесконтактного датчнка) поскольку злектрическне параметры датчика могут быть в пределах нормы.
Наиболее близким по технической сущности к предлагаемому является устройство для программного управления автооператором гальванической линии, содержащее блок управлеJDU, блок датчиков позиций, блоки управ,ления вертикальиым: и горизонтальным пере мещениями, блок задания выдержек времени, счетчик времеии, блок контроля движения автооператора по времени и исполнительные механизмы 2.
Недостаток дшного устройства заключается в том, что при j a6bTe автооператора могут коитролироваться только два временных интервала, т.е. коитролируётся время перемещеtoния автооператора с одной позиции на другую, соседнюю с первой, контролируемое время при зтом складывается из времени, необходимого для вертикального перемещения автооператора (первый времениой )
ts и времени, необходимого для горизоитального перемещения автооператрра (второй временной интервал). Способ контроля не може1 .применен к линии автооператора, который может работать по программам с
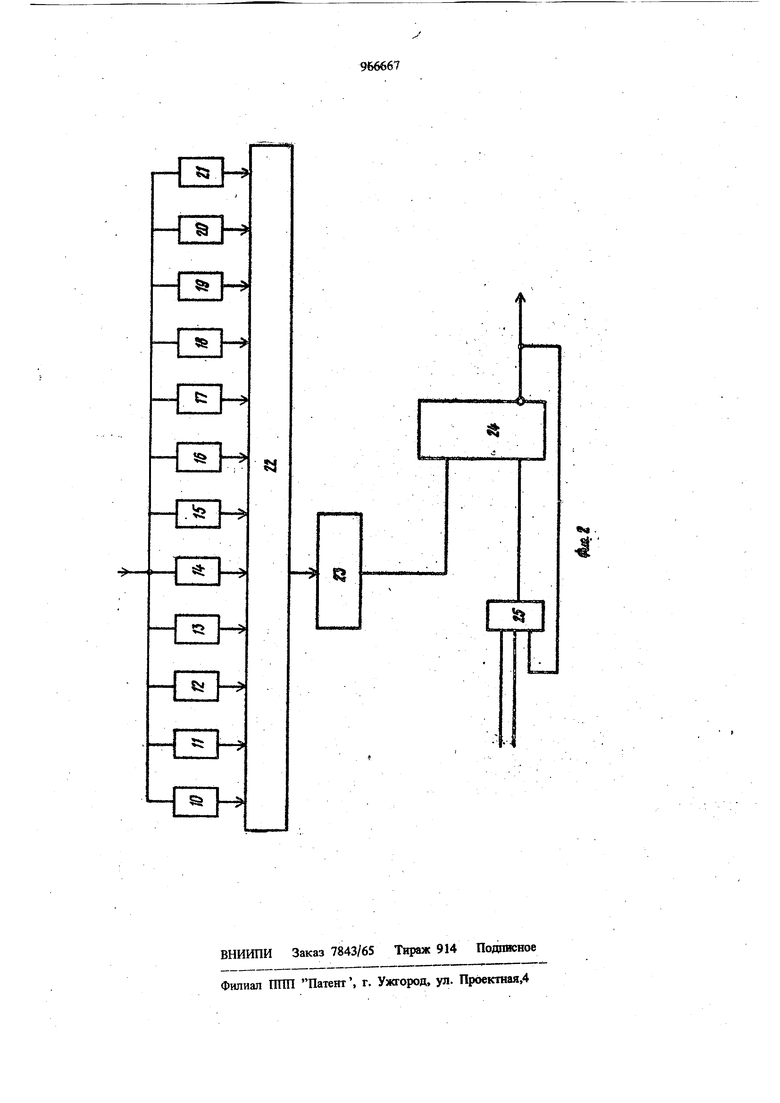
20 пропуском Одной и более технологических позиций,- поскольку при зтом необходимо контролировать несколько различных по длительностн временных интервалов. Цель изобретения - расширение функциональных возможностей устройства и повышение надежности работы автооператора на линии. Цель достигается тем, что в устройство для управления автооператором химико-гальванической линии, содержащее блок задания вьщержек времени, счетчик времени, первый блок управления, первым. входом подключённый к первому выходу счетчика времени, вход которого соединен с выходом блока задания выдержек времени, и последовательно соединенные блок датчиков, второй блок управления, блок контроля движения автооператора по времени, третий блок управлени и исполнительньй механизм,второй вход которого соединен с выходом первого блока управлеш1Я5 второй вход которого соединен с выходом блока контроля движения автооператора по времени, а третий вход соедине с выходом блока датчиков, выход блока дат чиков соединен с вторым входом третьего блока управления,. третий вход которого соединен с вторым выходом счетчика времени, а третий выход счетчика времени подключен к второму входу блока контроля движения автооператора по времени, третий вход которого соединен с выходом блока задания выдержек времени, а, четвертый вход подключен к выходу блока датчиков, введен блок форм рования команд, первым входом соединенный с выходом блока датчиков, вторым входом - с вторым выходом второго блока управления третьим входом - с третьим выходом счетчика времени, а первый выход блока формирования команд подключен к четвертому входу первого блока управления, второй выход подключен к четвертому входу третьего блока управления, а третий выход подключен к пятому входу блока контроля даижения автооператора по времени. Причем блок контроля движения автооператора по времени содержит двенадцать узлов формирования временных интервалов, подключенных выходами к регистру памяти, i и последовательно соединенные регистр памяти, преобразователь кода и двоичный счетчик, второй вход которого подключен к выходу элемента совпадения И, а выход подключен к первому входу третьето блока управления и второму входу первого блока згправления и к первому входу элемен та совпадения И, второй вход которого подключен к третьему выходу блока формирования команд, а третий вход - к третьему выходу счетчика времени. : На ч,фиг. 1 представлена структурная схема устройства; на фиг. 2 - структурная схема блока контроля движения автооператора по времени. Устройство содержит блок 1 датчиков, третий блок 2 управления, оёеспечиваюший управление перемещением автооператора по горизонтали, первый блок 3 управления, обеспечивающий управление перемещением автооператора по вергакали, блок 4 формирования команд, второй блок 5 управления, блок 6 задания выдержек времени, счетчик 7 времени, блок 8 контроля движения автооператора по времени, исполнительный механизм 9. Блок 8 контроля движения автооператора по времени содержит .двенадцать узлов формирования временных интервалов 10-21, регистр 22 памяти, преобразователь 23 кода, двоичный счетчик 24, элемент 25 И совпадения, стройство работает следующим образом, Техпроцесс нанесения химико-гальванических покрытий (например, техпроцесс нанесения покрытий на щюводники печатных плат) пред-, усматривает наличие на линии трех груйп ванн: ванны предварительной обработки, ванны основного покрытия и ванны окончательной обработки. Тругтл ванн предварительной и окончательной обработки обслуживаются автооператором по жестким программам без расцепления транспортируемой кассеты (приспособления) с обрабатываемыми изделиями. Количественный состав группы ванн основного покрытия определяется при проектировании линии и характеризует в основном производительность линии. На зтом участке линии автооператор должен работать по программам, предусматривающим расцепление транспортируемой кассеты, причем выполнение этих программ должно сводиться к транспортированию кассеты с последаей ванны группы ванн предварительной обработки на одну из свободных ванн основного покрытия. Таким образом, осуществляется загрузка гальванической ванны. Выгрузка гальванической ванны происходит по окончании выдержки времени выполнения операции на зтой ванне, при этом автооператор транспортирует кассету из этой ваншл в группу ва1Ш окончательной обработки,. Таким образом, вся программа работы автооператора на линии складывается из загрузки группы ванн оотовного покрытия, выгрузки их, а также из программы, обеспечивающей возврат автооператора на исходную позицию. . Порядок вьшолнешш автооператором программ в устройстве определяется блоком 4 формирования команд, который формирует на выходе одну из трех команд: Загрузить, Въггрузтъ, Вернуться на исходную позиций. Схема этого блока содержит три триггера с логическими схемами управления их yctabOBO4D№iMH входами. В зависимости от комбинации сигналов с блока 1 датчиков линии и сигналов, nocTynarouUuf со счетчика 7времени, один из триггеров устанавливается в единичное состояние, что соответствует формированию той или иной команды. Далее эти команды поступают на вход третьего блока 2 управления и на вход первого блока 9 управления, где схемным путем реализованы правила перемещения его в горизонтальном и вертикальном направлениях. Вто рой блок 5, управления, на вход которого поступают также сигналы от блока 1 датчиков и счетчика 7 времени, предназначен для управления первоначальным запуском автооператора и содержит кнопки управления и схему формирования сигнала Цикл. Значение уровня сигнала Цикл определяет однозначно состояние режима работы устройства автоматическое выполнение программы или ее сбой. Цри помощи блока 6 задания вьщержек времени задаются выдержки выполнения операций на ванна : линии, а при помощи счетчика 7 времени осуществляется непосредственный отсчет текущего времени выполнения операций на этих ваннах. При этом счетчик 7 времени для каждой операции нанесения осно ного покрытия формирует на выходе два сиг нала: сигнал Конец операции и сигнал приоритета Внимание, появляющийся за t мин до сигнала Конец операции (численное значение t выбирается равным времени, необходимому автооператору для прохождения групп ванн предварительной обработки с посл дующей загрузкой ванны основного покрытия 8дальнейшем сигналы Внимание поступают в блок 4 формирования команд и участвзовт в формировании команды Вьп-рузить. Кроме того, зти сигналы совместно с сигналами блока датчиков поступают на вход блока 8 контроля движения автооператора по времени. Работа этого блока происходит следующим об разом. В зависимости от комбинаций состояний уровней сигналов на входе блока 8 (фиг. 2) формируется потенциальный сигнал на выходе одной из двенадцати схем формирования интервалов 10-21, что соответствует перемещению гштооператора с пропуском данното числа ванн. Выходны сигналы с этих схем поступают на информационные входы регистра 22 памяти, работающего в режиме парал лельной записи информации. Таким образом, при формировании временных интервалов от 1 до 12 на информационных выходах регистра 22 памяти образуется комбинация О и 1, причем каждая комбинация соответствует определенному контролируемому интервалу, т.е. количеству ванн, пропускаемому автооператором при движешш. Двоичное число в обратном ходе с регистра 22 памяти поступает в преобразователь 23кода, который преобразует это число в прямой пятиразрядный двоичный код. Этот код поступает затем на информационные входы двоичного счетчика 24. Двоичный счетчик 24представляет собой восьмиразрядный двоичный вычитающий счетчик, счетные импульсы на который поступают с генератора счетчиков 7 времени (фиг. 1) по третьему входу через логический элемент И 25. Цри поступлении сигнала разрещения счета по второму входу содержимое двоичного счетчика 24 начинает уменьшаться с приходом на его счетный вход счетных импульсов. Если автооператор проходит выбранную ванifiy (т.е. время движения автооператора больше времени выбранного временного интервала), то из .двоичного счетчика 24 вычита:ется все записанное в нем число и на выходе блока 8 формируется сигнал, который выключает исполнительный механизм 9 (фиг.1) автооператора. Кроме того, сигнал, с выхода двоичного счетчика 24 (фиг. 2) поступает на третий вход логического элемента И 25, тем самым запрещая дальнейщее прохождение счетных импульсов на счетный вход двоичного cietteKa 24. Дальнейшая работа автооператора возможна линш в ручном режиме при пбмощи второго блока 5 управления, причем при помощи соответствующих кнопок управления этого блока обеспечивается возможность дублирования сигналов команд, формируемых блоком 4 формирования команд, и тем самым раздельно реализуются короткие программы работы автооператора, соответств)гющие командам Загрузить, Выгрзгзить, Вернуть на исходную позицию.. Таким образом, за счет введения в устройство для управления автооператором xmvaocpгальванической линии блока формирования команд и построение блока контроля движения автооператора по времени по описанной выще схеме, расширяются функциональные возможности устройства: управление автооператором на линии осуществляется по программам, предусматривающим пропуск более чем одной технологической позиции (ваШш), при этом автоматический контроль самой программы, осуществляемый блоком контроля движения автооператора по времени, повышает надежность работы автооператора на линии. Использование предлагаемого устройства позволяет полнее автоматизировать процесс управления автооперато1жыми-линиями, устранить возможные ошибки при автоматическом.
вьшолнении процесса нанесения химико-гапьванических покрытий.
Формула изобретения
1. Устройство для управления автооператором химико-гальванической линии, содержащее блок задают выдержек времени, счетчик времени, первый блок управления, первым входом подключенный к первому выходу счет чика времени, вход которого соединен с выходом блока задания вьвдержек времени, и последовательно соединенные блок датчиков, второй блок управления, блок контроля движения автооператора по времени, третий блок управления и исполнительный механизм,. второй вход которого соединен с выходом первого блока управления, второй вход которого соединен с выходом блока контроля движения автооператора по временн, а третий вход соединен с выходом блока датчиков, выход блока датчиков соединен с вторым входом третьего блока управления, тртий вход которого соединен с вторым выходом счетчика временн, а третий выход счетчика времени подключен к второму входу блока контроля движшия автооператора по времени, третий вход которого соединен с выходом блока задания выдержек времени, а четвертый вход подключен к выходу блока . датчиков, отличающееся тем, чю, |с целью расширения функцноналпных воэк1ожностей, в него введен блок формирования команд, первым входом соединенный с выходом блока датчиков, вторь1м входом - с вторым выходом второго блока управления, третьим входом - с третьим выходом счетчика времеии, а первый выход блока формирования команд подключен к четвертому входу первого блока управления, второй выход подключен к четвертому входу третьего блока управления, а третий выход подключен к пятому входу блока контроля движения автооператора по времени.
2, Устройство по п. 1, о т л и ч а ю щ ее с я тем, что блок контроля движения автооператора по -времени содержит 0(венадцать узлов формирования временных интервалов, подключенных выходами к регистру памяти, и последовательно соединенные ре,п1стр памяти, преобразователь кода и двоичный счет-. чик, второй вход которого подключен к выходу элемента совпадений И, а выход подключен к первому входу третьего блока управлег иия и второму ВХОДУ первого блока управле- ( ш и, к первому входу элемента совпаягитл i И, второе вход которого подсслючен к третьему выходу блока формирования команд, а третий вход подключен к третьему выходу четчика времени.
Источники информации, принятые во внимание прн зкспертизе
1.Авторское свидетельство СССР № 658527, л. G 05 В 19/18, 1976/
2.Авторское свидетельство СССР N 636585,, п. G 05 В 19/18, 1975 (прототап).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |

I.
kJ
8
Si
Si
к
Ь
