(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЗНЫМИ РЕЖИМАМИ ПОДЪЕМНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения параметров движения шахтных подъемных машин при аварийном торможении | 1990 |
|
SU1754612A1 |
| Устройство для выбора тормозных режимов подъемной машины | 1976 |
|
SU605777A1 |
| Устройство для определения нестабильности параметров тормозной системы подъемной машины | 1979 |
|
SU770984A1 |
| Способ управления тормозными режимами подъемной машины | 1979 |
|
SU770982A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| Устройство управления пневмогрузовым приводом тормоза шахтной подъемной машины | 1983 |
|
SU1245536A1 |
| Способ управления предохранительным торможением шахтной подъемной машины и устройство для его осуществления | 1988 |
|
SU1640093A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
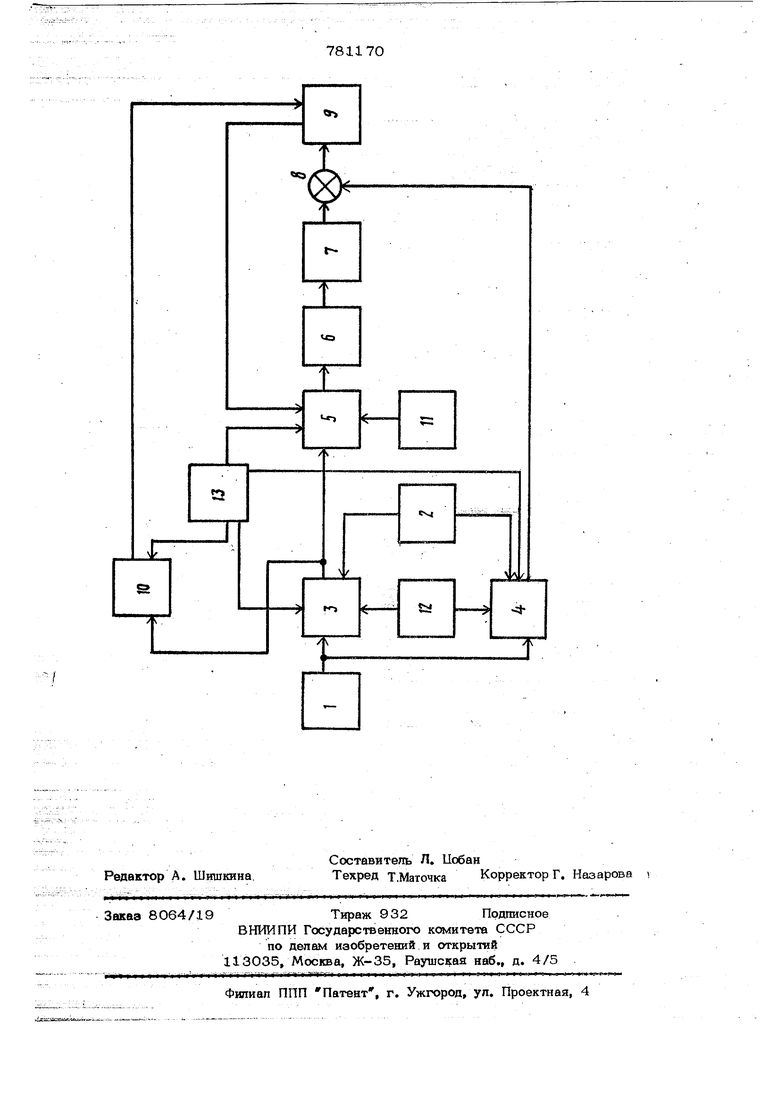
Изобретение ОТНОСИТСЯ к автоматизации подъемно-транспортнык механизмов и конкретно к устройствам для изменения тормозных режимов подъемной машины. Известно устройство для управпения тормозными режимами подъемной машины содержащее датчики пути и направления движения груза, скорости и н&грузки на валу подъемной машины, блок выдачи уставок максимальных и минимальных замедлений груза, ко входам которого подключены датчик пути и направления движ ния груза и блок анализа причины включения тормоза, а к выходу - один из вхо де суг -гматора, связанного выходом с регулятором тормозной системы fl Недостатком этого устройства является то, что при оптимизации процесса торможения в нем не учитьтаются изменения параметров тормозной систа 1Ы, в частности изменения поверхности футерсйки тормозных колодок, коэффициента трения тормозных элементов и их температуры. Кроме того это устройство не может оптимизировать процессы в системах регулируемого торможения с задержкой включения разностного сигнала между заданным и действительным значениями замедления поднимаемого груза. Т. е. известное устройство позволяет выбрать оптимальный режим торможения лишь по ограниченному числу априорных параметре, влияющих на процесс торможения, и не предусматривает одновременной оптимизации параметров ВСРЙ системы управления процессом торможения с учетом действительных условий эксплуатации подъемной машины, что сказывается на точности управления тормозным режимом подъемной машины и в конечном счете на сроке службы ее элементов (канатов, футеровки тормоза и т. д.). Цель изобретения - повышение срока службы э ементсж подъемной машины. ;3та цель достигается тем, что устройство для управления тормозньп ги режимами подъемной машины снабжено коммутатором, блоками выдачи уставок первоначапбного тормозного усилия и времени включения коммутатора, блоком коррекции тормозного усилия по величине сигнала нестабильнсюти параметров, тормозной системы и датчиком замедления, подключенным ко второму входу сумматора, выход которого через коммутатор соединен с одним из входов регулятора тормозной системы, другие входы которого соединены с выходами блоксв коррекции тормозного усилия по величине сигнала нестабильности параметров тормозной системы анализа причины включения тормоза и вы дачи уставок первоначального тормозного усилия, выход последнего из которых соединен дополнительно с одним из входсв блока выдачи уставок времени включения коммутатора, а входы - с датчиками нагрузки на валу подъемной машины и скорости, дополнительно соединенными с блоком выдачи уставок максимальных и минимальных замедлений груза, и дат чиком пути и направления движения груза причем другой вход блока выдачи уставок времени включения коммутатора соединен с блоком анализа причины включения тормоза, а выход - с управляющим входом коммутатора. На чертеже изображена функциональна схема устройства. Устройство содержит датчик 1 нагруз ки на валу подъемной машины и датчик 2 пути и направления движения груза, соединенные с блоками 4 выдачи уставок соответственно первоначального тормозного усилия и максимальных и минимальных замедлений-груза. Выход блока 3 ЯОДключей к регулятору 5 тормозной системы подъемной машины 6. Устроййтво содержит датчик 7 замедления соединенный с одним из входов сумматора (блок сравнения) 8, к другому входу которого подключен блок 4, а к выходу через коммутатор 9, управляе Й й блоком 1О выдачи уставок времени включения коммутатора, подключен регулятор 5 тор моза, соединенный дополнительно с выхо дом блока 11 коррекции тормозного усилия по вепиганесигнала нестабильности параметров тормозной системы. Ко входам блоков 3 и 4 подключены датчик 12 скорости и блок 13 айалй запр1ТЙйнь1 включениятормоза,соединенный также 3 блоком 10 и регулятором 5., Устройство работает следующим обра зом. -- До начала процесса торможения совокупность-выхощ ых сигналов датчиков 1,
781170 2 VI 12 -л блока 13 устанавливает на выходе блока 3 первоначальное значение тормозного усилия, а на выходе блока 4 - заданное минимальное или максимальное (в зависимости от направления движения груза) значение замедления груза. Выходной сигнал блока 3, воздействуя на регулятор 5, вызывает снижение скорости подъемной машины с заданным замедлением 0)j , определенным выходным сигналом блока 4 и установленным на одном входе сумматора 8. Действительное значение замедления ОТ. с датчика 7 непрерывно поступает на второй вход сумматора 8, на выходе которого формирует ся сигнал ошибки по замедлению груза О, Учитывая что приближено d. К Fгде К - величина, характеризующая эффективность действия тормозного усилия Р на выходе тормозной системы и, что из условия нормальной .эксплуата1ШИ подъемной машины, F не может мгновенно достигнуть своего заданного значения р. , необходимого для уста0, .можно сказать, что ранс ления°з А -может обеспечиватьвене ТВ о ся лишь после истечения заданного времени L. . , зависимого от величины и интенсивности его нарастания. Если принять Т о при РТ i -t, оом8 ( можно отметить, что в момент включения коммутатора 9 сигнал ошибки i йО( тоже будет различньп г и регулятор 5 вынужден будет обрабатьтать этот сигнал за время, близкое к (2 - 3)Т. , где TL - допустимая инерционность тормозной системы, определяемая в основном суммарной инерционностью движущихся масс, т. е. режим торможения будет протекать с динамическими ошибками по замедлению груза или колебаниями ускорения, что равносильно приложению дополнительных динамических усилий к элемен- там подъемной машины, снижающих срок службы последних. Устройство обеспечивает Tj f СPU. счет подачи выходного сигнала блока 3 на .вход блока 10. В этом случае сигнал ошибки л О( через коммутатор 9 по- . дается на вход регулятора 5 лишь по истечению времени 1/,, , заданного на выходе блока 1О в зависимости от величины и интенсивности нарастания Р , . Поэтому в момент срабатывания регулятора 5 тормоза, отключенного до этого по ошибке замедления груза, величина д Q близка к нулю и определяется лишь нестабильностью параметров тормозной системы и других эломентов устройства. Так как до получения импульса на начал торможения блок 11, воздействуя на рег лятор 5 тормоза, корректирует его настройку по величине сигнала нестабиаьност параметров тормозной системы, то велич на и d в момент упомянутого переклк чения регулятора 5 равна яупю. Подключение блока 13 к регулятору 5 и блоку 10 обеспечивает скачкообразный переход к режиму предохранительного, рабочего, экстренного торможения я наложения заданного тормозного усилия при нулевой скорости движения груза и установку оптимального времени коммутации. . Устройство обеспечивает при люб(л нарушении цепей управления предохранительное торможение машины с замедлением, на которое рассчитан тормоз, но не более 5м/с. Формула изобретения Устройство для управления тормозными режимами подъемной машины, содерн жащее датчики пути и направления движения груза, скорости и нагрузки на валу подъемной машины, блок вьщачи уставок максимальных и миним11льных замедлений груза, ко входам которого подключены датчик пути и направления движения груза и блок анализа причины включения тормоза, а к выходу - один из входов сумматора, связанного выходом с регулятором тормозной системы, о т л и ч а ю щ е а с я тем, что, с целью поеьшения срока службы элементов подъемной машийы, оно снабжено коммутатором, блоками выдачи уставов первоначального тормозного усилия и времени включения коммутатора, блоком коррекции тормозного усилия по величине сигнала нестабильности параметров то{Ж{озной системы и датчиком замедления, подключенным ко второму входу сумматора, выход которого через коммутатор соединен с одним из входов регулятора тормозной системы, другие входы соединены с выхог. дами блоков коррекюш тормозного усилия по аеличиве сигнала нестабильности параметроа тормозной системы, анализа причины включения тормоза и выдачи уставок первоначального тормозного усилия, выход последнего из которых соединен дополнительно с одним из входов блока выдачи уставок времени включения ксмму татора, а входы -с датчиками нагрузки на BaTiy подъемной машины и скорости, дополнительно соединенными с блоком вьздачи уставок максимальных и минимальных замедлений груза, и датчиком пути и направления движения груза, причем пругой вход Шока выдачи уставок времен:и вкяючеесня коммутатора соединен с блоком анализа причины включения тормоа, а выход - с управляющим входом к шутатора. Источники инфcpмaциl. pmJceitHe во внимание при экспертизе 1. Авторское свидетельство СССР Ь 6О5777, кл. В 66 В 5/02, 11.05,76 (прототип).
