Известно устройство управления приводом рабочего оборудования экскаватора, включающее электротидравлические распределители и моделирующий рычаг.
Однако это устройство недостаточно надежно и не обеспечивает сохранения оптимально.го угла резания.
Целью изобретения является .повышение его надежности.
Для этого устройство, связывающее соответствующие между собой элементы рабочего оборудования и моделирующего рычага, выполнено с сельсинами, соединенными по индикаторной схеме, причем вторичные обмотки каждой пары сельсинов, установленной на соответствующих элементах рабочего оборудоваиия и моделирующего рычага, связаны с электрогидравлическими распределителями и приводом рабОчего оборудования.
Сущность изобретения поясняется чертежом.
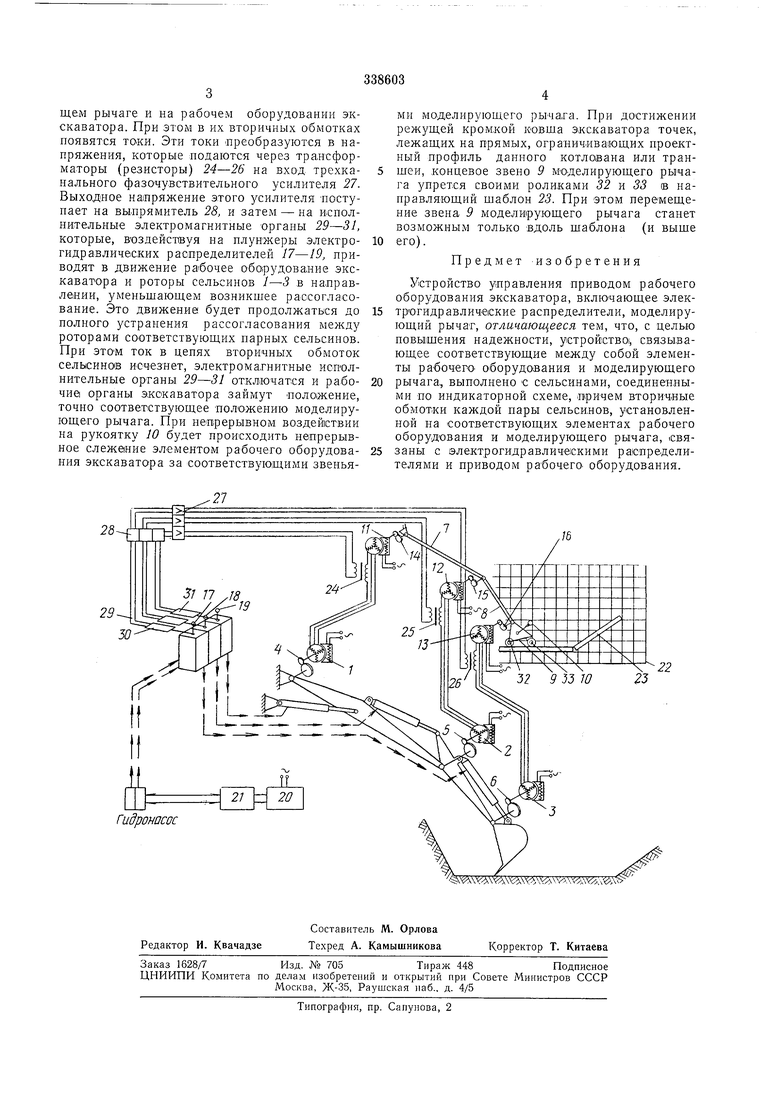
Предложенное устройство включает сельсины -3, установленные посредством редукторов 4-6 соответственно на шарнирах; моделирующий рычаг, выполненный в виде трех шарнирно-сочлененных звеньев 7-9 геометри- ад ахи. подобных элементам . 0|браткоятку управления 10, установленные на шарнирах, соединяющих кинематические пары моделирующего рычага, сельсины 11-13 посредством редукторов 14-16, имеющих те же передаточные отношения, что и у редукторов 4-6 и электрогидравлические распределители 17-19. Вторичные обмотки сельсинов /-3 электрически соединены с соответствующими обмотками парных сельсинов 11-13. Питание обмоток возбуждения сельсинов осуществляется от генератора переменного тока 20 с нриводом от силового агрегата экскаватора 21 или от преобразователя. Сельсины соединены по индикаторной схеме.
Устройство работает следующим образом.
Перед началом работы ра.бочее оборудование экскаватора и м оделирующий рычаг приводятся в одно из крайних положений. После включения литания на панели 22, выполненной с координатной сеткой, устанавливается направляющий шаблон 23, ограничивающий зону качания. Для управления движением рабочих органов экскаватора машинист воздействует на рукоятку 10 в соответствии с требуемым перемещением ковша. Незначительное перемещение моделирующго рычага рукояткой управления 10 вызывает рассогласование между роторами соответствзющих парных сельсинов, установленных на моделирую
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ШАГАНИЯ ЭКСКАВАТОРА | 1969 |
|
SU255135A1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ ПОЛОСЫ—асьиок?3!-!дя 11ДТ?НТЙМЕ|дЩС?Ш | 1973 |
|
SU362059A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| Устройство управления приводомРАбОчЕгО ОРгАНА лЕСОзАгОТОВиТЕльНОйМАшиНы | 1979 |
|
SU818856A2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU219457A1 |
| ВСЕСОЮЗН.А^Я | 1973 |
|
SU369953A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| ПОДЪЕМНАЯ ЛЕБЕДКА | 1968 |
|
SU211054A1 |
