Изобретение относится к области автоматического контроля и учета работы экскаваторов-драглайнов, используемых при ведении открытых горных работ и при строительстве различных гидротехнических сооружений с проведением значительного объема работ по перемещению грунта.
Известно устройство контроля и учета работы драглайна, включающее логический блок и блоки измерения величины загрузки ковша, фиксации области пространства, измерения угла поворота платформы экскаватора, датчики длин тягового и подъемного канатов, угла поворота платформы и величины загрузки ковша.
Однако, известное устройство не обеспечивает достаточную точность оценки работы драглайна.
1Делью изобретения является повьпнение точности оценки работы драглайна.
Для этого предложенное устройство снабжено блоком измерения высоты подъема ковша, один вход которого через схему «И соединен с выходами блока фиксации области пространства и логического блака, два других входа соединены с соответствующими выходами логического, блока, а остальные- соо.тветственпо .подключены к выходам блока измерения угла поворота платформы и блока измерения -величины загрузки ковша.
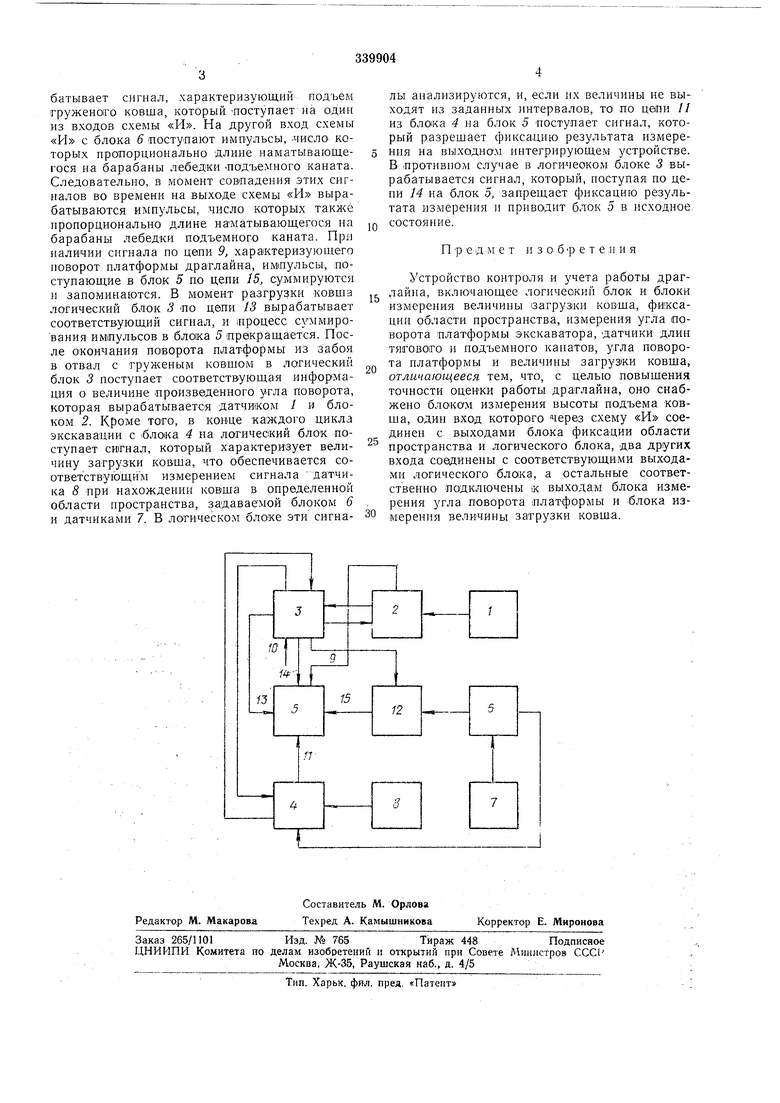
На чертеже показана блок-схема предложенного устрО1 |Ства.
Устройство включает датчик 1 угла поворота платформы экскаватора-драглайна, блоч 2 измерения yr,ia поворота платформы, логический блок 3, блок 4 измерения величины загрузки ковша, блок 5 измерения в1 1соты подъе.ма ., блок б фиксации области пространства и датчики 7 и 8 длин тягового и подъемного канатов и величины загрузки ковша, соответственно.
Работает устройство следующим образом.
Датчик / подключен к входу блока 2, один выход которого по цепи 9 подключен к блоку 5, а - к входу логического б,:1ока 3. По цепи 10 логический блок ло-дключен к станции управления основными приводами драглайна, и кроме того, по другой цепи логический блок соединен с выходом блока 4. Другой выход блока 4 по цепи // подключен к входу блока 5. Вход этого же блока 5 через схему «И 12 соединен с выходамн блока 6 и логического 3, а два других входа соединены по цепя.м 13 II 14 с соответствующими кыхолами логического блока 3. Блоки 4 н подключены входами соответствеппо к датчикам 8 и 7. Логическпй блок 3 анализирует управляющие сигналы, иоступающие в процессе экскавации по цегш JO от станции управления главными приводами драглайиа, и выра
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
