Предлагаемый способ может быть использован для стабилизации |релейных систем управления инерциоННыми объектами при отсутствии инф|ормаци1И о скорости изменения регулируемой величины я ограниченных запасах рабочего тела иснолнительного устройства.
Известен способ стабилизации оистемы управления инерционным объектов путем формирова1НИЯ поступающего на реле корректирующего сигнала в виде раз ности между действительным выходным сигналом оистемы и полов(иной его экстремального з начения.
ОСНовным недостатком этого известного способа является большое ч.исло переключений исполнительного элемента.
Предлагаемый способ отличается от известных тем, что .получают второй разностный сигпал .между текущим значением выходного сигнала и другой частью его экютремального значелния и формируют корректир,ующ,ий сигнал в виде суммы двух сигналов одной амплитуды со знаками, соотВетст;вующимИ знакам разностных си гналов.
Такая последовательность дейст вий позволяет сформировать сипнал коррекции, уменьшающий число переключений июнолнительного релейного элемента, что уменьшает расход рабочего тела и улучшает динамические свойства системы.
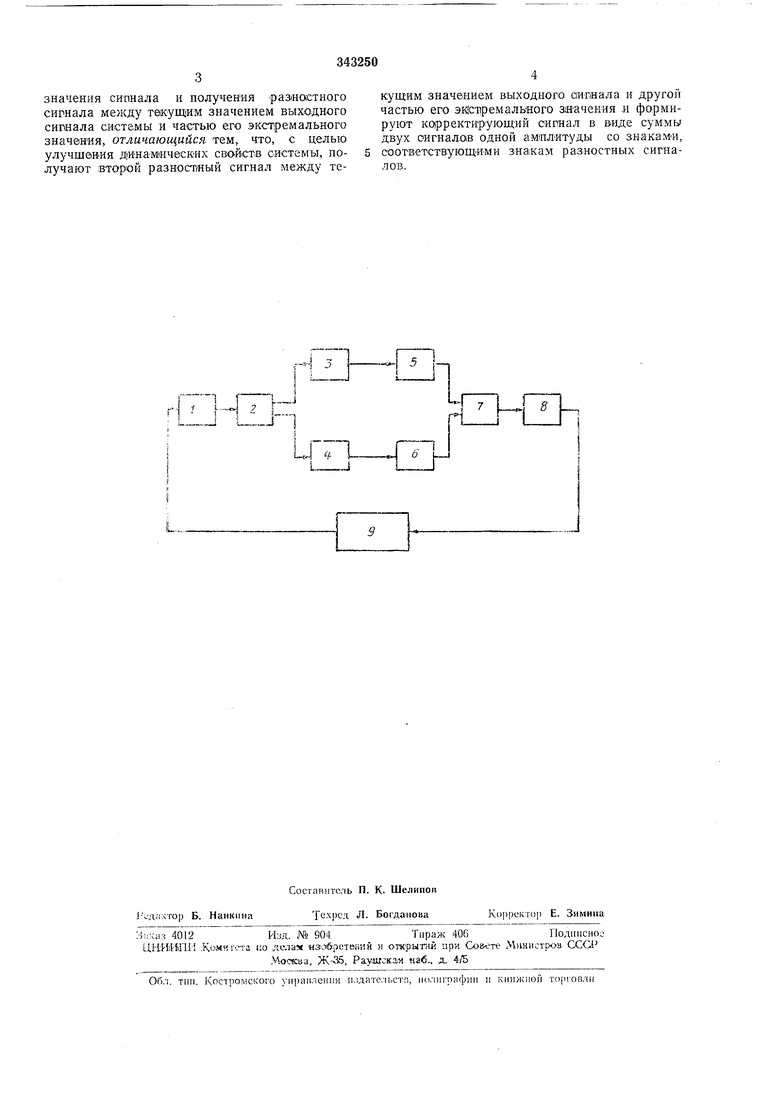
лол енную последовательность де1 |стВИЙ, приведена на чертеже, где приняты следующие обозначения:
J - блок запомнпания экстремума сиглала; 2 - делитель; 3, 4 - блоки определения разностл; 5. 6 - блоки определения знака разности; 7 - сумматор; 8-исполнительный релейный элемент; 5---объект.
Устройство работает следующим образом.
Сигнал с блока 1 запоминания экстремума сигнала на две части в заранее выбранном отнощении в делителе 2. Обе части сигнала с выхода делителя подаются на блоки 3 и 4 оцределения разиоспи, где сравниваются с текущим значением выходного сигнала объекта 9. Выходные сигналы блоков 3, 4 подаются на блони 5 и 6 определения знака разности, с выхода которых сигналы одинаковой амплитуды со знаками, соответствующими
зпака.м разности, подаются ;на сум матор 7, где и формируется сигнал управления исполнительным релейным элементом 9 (объектом).
П р е д м е т и з о б р е т е н и я
Способ выработки нелинейного корректирующего сигнала для стабилизации релейной системы управления инерЦИОННЫм объектом, основанный на запомилянин экстремального
значения сипнала и получения раанастного сигнала между текущим значением выходного сигнала системы и частью его экст-ремального значения, отличающийся тем, что, с целью улучшения Д ИНам1Иче сКИх свойств системы, получают второй разностйый сигнал между текущим значением выходного аипнала и другой частью его экстремального значения .и формируют корректирующий сигаал в виде суммы двух оигналав одной амплитуды со знакамИ, соответствующими знакам разностных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1970 |
|
SU283353A1 |
| Способ адаптивной коррекции двухканальной следящей системы | 1974 |
|
SU703778A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЛЕЙНЫХ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ | 1972 |
|
SU330428A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР С ШИРОТНО-ИМПУЛЬСНЫМ МОДУЛИРУЮЩИМ ВОЗДЕЙСТВИЕМ | 1970 |
|
SU265224A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| Способ стабилизации положения плазменного шнура в токамаке | 1983 |
|
SU1119490A1 |
1
L:J-i:.Jn
1 1(
L
