Изобретение относится к приборостроению, в частности к приборам для поверки угловых и линейных акселерометров.
Известные устройства для задания ускорений, содержащие подвижную платформу с приводом, датчик смещения и усилитель и работающие в автоколебательном режиме, характеризуются невозможностью получения частот ycKopein-n t менее 10 гц и несинусоидальной формой изменения ускорения.
Предлагаемое устройство позволяет получить синусоидальный закои изменения ускорений и расширить рабочий диапазон частот в область крайне низких значений ( гц). Для этого оно снабжено последовательно соединенными задатчиком и интегратором, причем выход последнего подключен к входу управления приводом платформы, а вход задатчика соединен с датчиком угла.
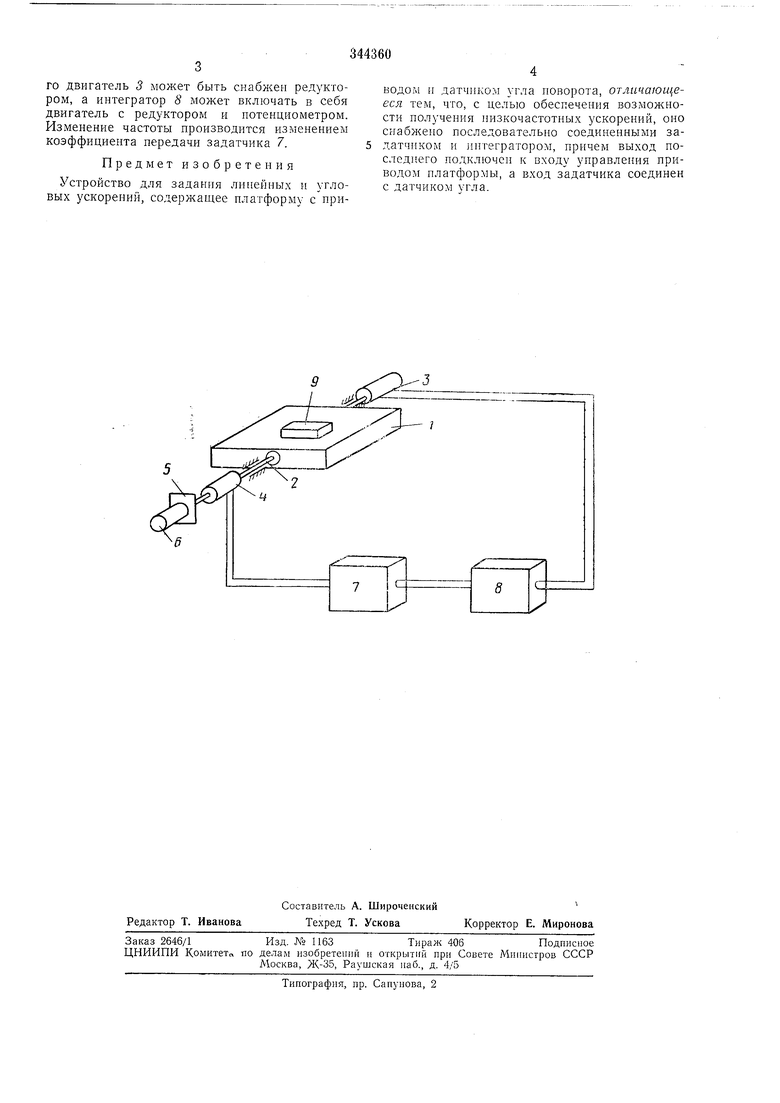
На чертел е представлена упрощенная схема предлагаемого устройства.
Устройство содержит поворотную платформу /, закрепленную в корпусе на оси 2. На оси укреплен приводной двигатель 3, датчик 4 угла и площадка 5 для крепления углового акселерометра 6. Датчик угла соединен со входом задатчика 7 частоты, который в частном случае представляет собой регулируемый делитель папряже1И1я. Выход задатчика через интегратор 8 соединен с управляющим входом
приводного двигателя 3. Поверяемый линейный акселерометр 9 крепится на платформе / таким образом, чтобы его измерительная ось была перпендикулярна к оси 2 платформы 1 и лежала в плоскости горизонта.
Устройство представляет собой замкнутую длиннопериодическую автоколебательную систему, реализующую уравнение
s-+ - °где (,) YKzKJ iKs,, а /(з, /(,,, 7, s - коэффициенты передачи двигателя 3, датчика 4, задатчика 7 и интегратора 8 соответственно. Рещение этого уравнения имеет вид
9 сро sin /,
где фо Иачальиый угол установки платформы /.
Таким образом, платформа / соверщает гармонические колебания вокруг осн 2 с угловым ускорением ) и частотой со. При малых значениях начального утла фо линейлое ускорение, воспринимаемое акселерометром 9,
равно
а г g sin «о sin sfe g сро sin ш1.
го двигатель 3 может быть снабжен редуктором, а интегратор 8 может включать в себя двигатель с редуктором и потенциометром. Изменение частоты производится изменением коэффициента передачи задатчика 7.
Предмет изобретения
Устройство для задания линейных и угловых ускорений, содержащее платформу с приводом и датчиком угла поворота, отличающееся тем, что, с целью обеспечения возмол ности получения низкочастотных ускорений, оно снабжено последовательно соединенными задатчмком п интегратором, причем выход последнего подключен к входу управления приводом платформы, а вход задатчика соединен с датчиком угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Устройство для испытаний угловых акселерометров | 1979 |
|
SU998958A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Устройство для определения жесткости упругих элементов | 1984 |
|
SU1247704A1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
