Предложенное устройство относится к средствам вычислительной техники и может быть использовано при моделировании систем с аои.нхронными двигателями.
В основном авт. св. № 219921 описано устройство для моделировалия асинхролного двигателя, содержащее сумматоры, блок коэффициентов, функциональный блок с характеристикой ограничения, блок умножения и блок деления.
Устройство, описанное в основном авторском свидетельстве, не учитывает зависимости механической характерист1ики асинхронного двигателя от изменения частоты и напряжения сети питания.
Для достижения этого предложенное устройство дополнительно содержит последовательно соединенные инвертор, сумматор и блок умножения, причем вход инвертора соединен со входом основного сумматора и служит ВХОДО.М информации об изменении частоты сети питания, второй вход дополнительного сумматора служит входом информации об изменении напряжения сети питания, третий его вход подключен к положительному полюсу источника напряжения постоянного тока, второй вход дополнительного блока умножения соединен с выходом блока деления, а выход служит выходом устройства.
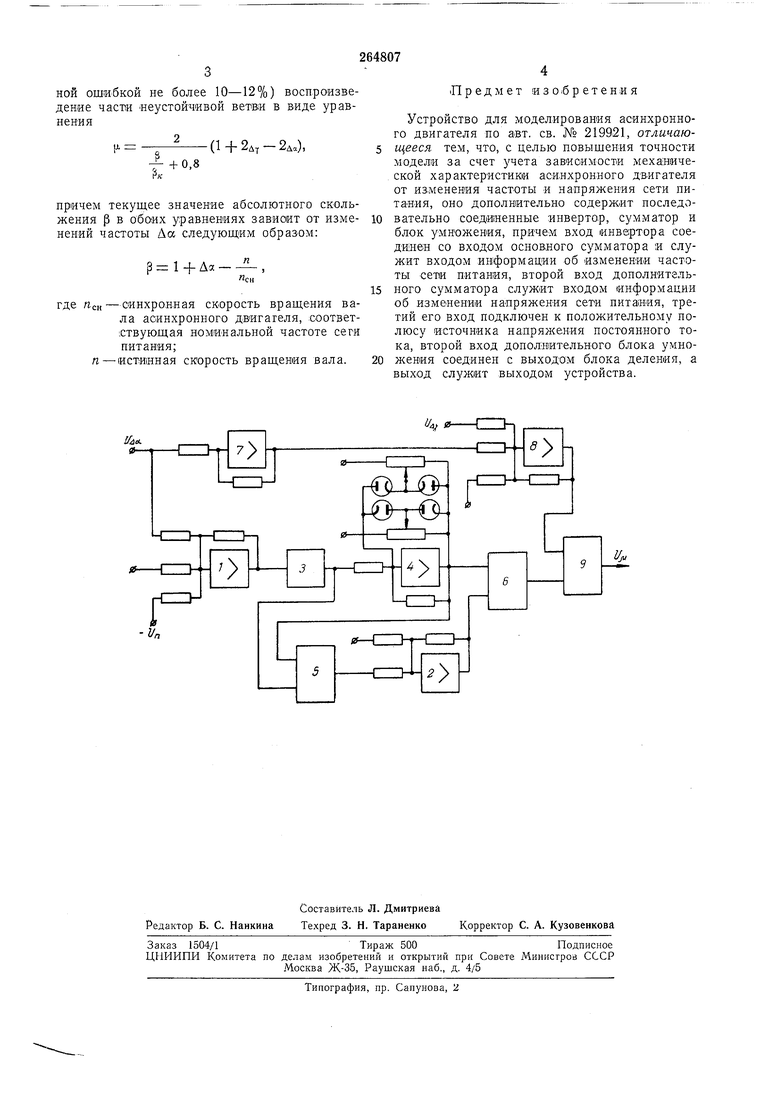
Па чертел е представлена схема предлагаемого устройства.
|Устройство содержит основные сумматоры / и 2, блок коэффициентов 3, функциональный
блок 4 с характеристикой ограничения, блок умножения 5, блок деления 6, инвертор 7, сумматор 8 и блок умножения 9.
Па схеме приняты следующие обозначения: и„-напряжение, пропорциональное скорости асинхронного двигателя; U.,. - напряжение, нронорциональное моменту, развиваемому двигателем; бд - напряжение, пропорциональное изменению частоты сети питания; д - напряжение, пропорциональное изменению напряжения сети питания.
Предлагаемое устройство обеспечивает точное воспроизведение механической характеристики в виде уравнения
(1 + 2д, - 2д.),
Р-
+ где (1-момент асинхронного двигателя в относительных единицах; Да и Д - соответственно относительное изменение работы и напряжения сети питания при текущих значениях абсолютного скольн ения ,25 р
ной ошибкой не более 10-12%) воспроизведение части Неустойчивой ветви в виде уравнения
(1+2д,-2д.),
V+0«
к
причем текущее значение абсолютного скольжения р в обоих уравнениях зависит от изменений частоты Да следующим образом:
р 1 + Да - JL ,
Пен-синхровная скорость вращения вала асинхронного двигагеля, соответствующая номинальной частоте сеги питания; п--истинная скорость вращения вала.
Предмет изо-бретения
Устройство для моделирования асинхронного двигателя по авт. св. № 219921, отличающееся тем, что, с целью повыщения точности модели за счет учета зависимости механической характеристики асинхронного двигателя от изменения частоты и напряжения сети питания, оно дополнительно содержит последовательно соединенные инвертор, сумматор и блок умножения, причем вход инвертора соединен со входом основного сумматора и служит входом ин1формации об изменении частоты сет1и питания, второй вход донолнитгльного сумматора служит входом информации об изменении напряжения сети питания, третий его вход подключен к положительному полюсу источника напряжения постоянного тока, второй вход дополйительного блока умножения соединен с выходом блока деления, а выход служит выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1972 |
|
SU347767A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1971 |
|
SU290294A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1968 |
|
SU219921A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2564991C1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
{/
