Изобретение относится к области автоматики, а именно к системам дистанционного управления подвижными объектами.
Известно цифровое устройство для программного регулирования скорости подъемной маолины, содержащее блок задания положения, блок контроля скорости и релейный блок, выход которого через канал связи соединен с блоком подвижного объекта.
Для повышения надежности, точности работы и обеспечения возможности выбора направления движения предлагается устройство для программного регулирования скорости подвижных объектов, которое содержит последовательно соединенные дополнительные блок выбора меньшего числа, блок инвертирования, блок вычитания и дешифратор рассогласования, выход которого через блок контроля скорости соединен с одним из входов релейного блока, второй вход которого соединен с выходом блока выбора меньшего числа, причем один из выходов канала связи соединен со входом блока определения положения.
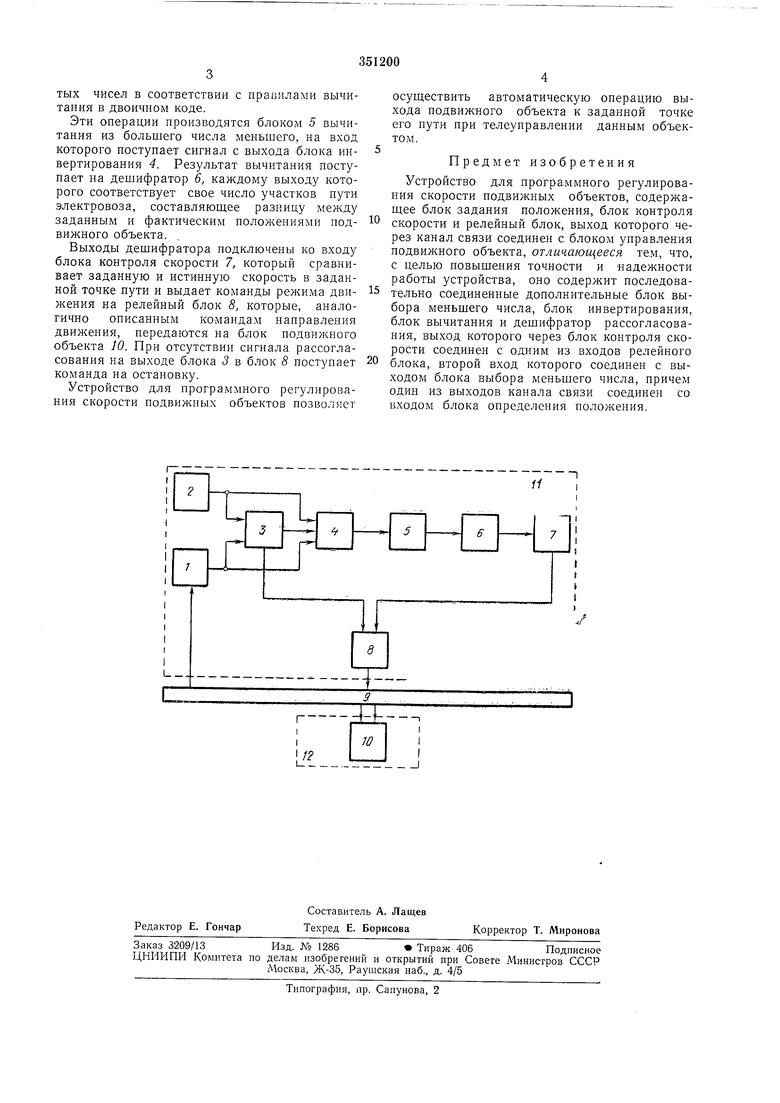
На чертеже представлена блок-схема предлагаемого устройства.
Она содержит блок определения положения /, блок задания положения 2, блок выбора меньшего числа 3 (выполняет одновременно функцию выбора направления движения), блок инвертирования 4, блок вычитания 5, дешифратор рассогласования 6, блок контроля скорости 7, релейный блок управления подвижным объектом 5, канал связи 9, блок подвижного объекта 10, операторский пункт // и подвижный объект 12.
Устройство для программного регулирования работает следующим образом.
Сигналы из блока определения положения объекта / и блока задания положения объекта 2, представляющие собой числа в двоичной системе, кодирующие участки пути, поступают на входы блока выбора меньшего числа 3. В результате сравнения определяется меньшее число, а тем самым, и направление движения подвижного объекта 12. Сигнал о направлении движения выдается из блока 3 в релейный блок управления объектом 8 и через канал связи 9 на блок подвижного объекта 10, управляющий движением подвижного объекта.
При перемещении подвижного объекта 12 вдоль рабочего участка блок 10 выдает сигнал в блок определения положения 1.
С выходов блоков определения положения объекта 1, задания положения объекта 2 и выбора меньшего числа 3 сигналы подаются на вход блока инвертирования 4 меньшего из чисел.
тых чисел в соответствии с правилами вычитания в двоичном коде.
Эти операции производятся блоком 5 вычитания из большего числа меньшего, на вход которого поступает сигнал с выхода блока инвертирования 4. Результат вычитания поступает на дешифратор 6, каждому выходу которого соответствует свое число участков пути электровоза, составляющее разницу между заданным и фактическим положениями иодвижного объекта.
Выходы дешифратора подключены ко входу блока контроля скорости 7, который сравнивает заданную и истинную скорость в заданной точке пути и выдает команды режима двил :ения на релейный блок 8, которые, аналогично описанным командам направления движения, передаются на блок подвижного объекта 10. При отсутствии сигнала рассогласования на выходе блока 3 в блок 8 поступает команда на остановку.
Устройство для программного регулирования скорости подвижных объектов позволяет
осуш;ествить автоматическую операцию выхода подвижного объекта к заданной точке его пути при телеуправлении данным объектом.
Предмет изобретения
Устройство для програ.ммного регулирования скорости подвижных объектов, содержащее блок задания положения, блок контроля скорости и релейный блок, выход которого через канал связи соединен с блоком управления подвил ного объекта, отличающееся тем, что, с целью повышения точности и надежности работы устройства, оно содержит последовательно соединенные дополнительные блок выбора меньшего числа, блок инвертирования, блок вычитания и дешифратор рассогласования, выход которого через блок контроля скорости соединен с одним из входов релейного блока, второй вход которого соединен с выходом блока выбора меньшего числа, причем один из выходов канала связи соединен со входом блока определения положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным объектом | 1978 |
|
SU746446A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| Устройство для телеуправления подвижным объектом | 1979 |
|
SU783829A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
12
I
