(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЬМ ОБЪЕКТОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| Устройство управления позиционирующим механизмом накопителя на магнитных дисках | 1990 |
|
SU1707621A1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
Изобретение относится к автоматизации управления подвижными объектами промышленных предприятий,например, коксовыми машинами, кранами, 5 слитковозами, может быть использовано в коксохимической, металлургической и других отраслях промышленности .
Известно устройство для програм- JO много регулирования скорости. поДвиж.ных объектов 1, содержащее блок задания положения, блок контроля скорости и релейный блок, выход которого через канал связи соединен с блоком управления подвижного объекта, последовательно соединенные блок выбора меньшего числа, блок инвертирования, блок вычитания и дешифратор рассогласования, выход которого 20 через блок контроля скорости соединен с одним из входов релейного блока, второй вход которого соединен с выходом блока выбора меньшего числа, причем один из выходов канала связи 25 соединен со входом блока определения положения.
Недостатком данного устройства является низкая точность регулирования движения подвижным объектом в 0
связи с тем, что в данном устройстве точка начала торможения не может быть т.очно определена при любых скоростях подвижного объекта.
Наиболее близко по технической сущности к данному изобретению устройство для управления подвижным объектом 2, содержащее задатчик и датчик положения подвижного объекта, блок определения скорости и испытательный блок, блок сравнения и компаратор, входы которого соединены с выходами задатчика и датчика положения объекта, а выход - с одним из входов блока сравнения, второй вход которого соединен с блоком определения скорости, а выход с исполнительным блоком.
Указанное устройство не обеспечивает надежного управления подвижным объектом, при наличии на пути движения второго подвижного объекта и на граничных участках, как это имеет место, например, в условиях коксового цеха, где на одном пути могут работать одновременно две коксовые машины. Такое устройство не может предотвратить возможного столкновения подвижных рбъеквЁгбзда управляемого объекта за пределы конечныхучабТТсов контролируемого пути.
Цель изобретения - повышение надежности устройства. Эта цель дос тигаётся тем, что устройство содержит последовательно соединенные ёлок уставок граничных Значений, ,. вйчидлйтел ьный eiioK и второй блок сраЭДМмйй,- пдсИедеёателънр соёдйнённые датчик полоЖёНйй встречногЬ объекта, второй вычислительный блок и третий блок сравнения, последователь йоссУёдйнённыё первый блок определения пути тормойсе нШ и сумматор, а также второй блок бпредёления пути ТбрмЬжеййя,вШ:од которого под1клгач:ён ко второму входу сумматора, а вход - .Жа:-::ШЗШ111Г я встречно гО 6бъёкта,ёход первого блока определения пути-Т01р1ШШйШ1 й§я1§1 Г с &ы -да адка Т1бйШ§Йи ЪЪъё1 таV со Вторым входом пёрВрго вычислительного блока и со вторым входом второ::;гр;Шчйс:лйтельнЬг6 бЛЬка, ей втйрыи 5сЪдЪй пё:р 6 г6 блока - срав : нения, и сО вторым в сЪдЪй втОрОРЬ блока сравнения, выход сумматора соединён со вторым ВХОДОМ третьего блока сравнения, второй выхОд блока уставок значён11Й ЪбЩ ен с третьим 8ХОДОй й1ВрбТо 1Гьг ислйтельного блока, а вторые выходы первого и второго вы Числительных блоков и вЕззсрды второго третьегб Влоков сравнения подклгочены к соответствующим входам исполни-тельного блока , ;--- v
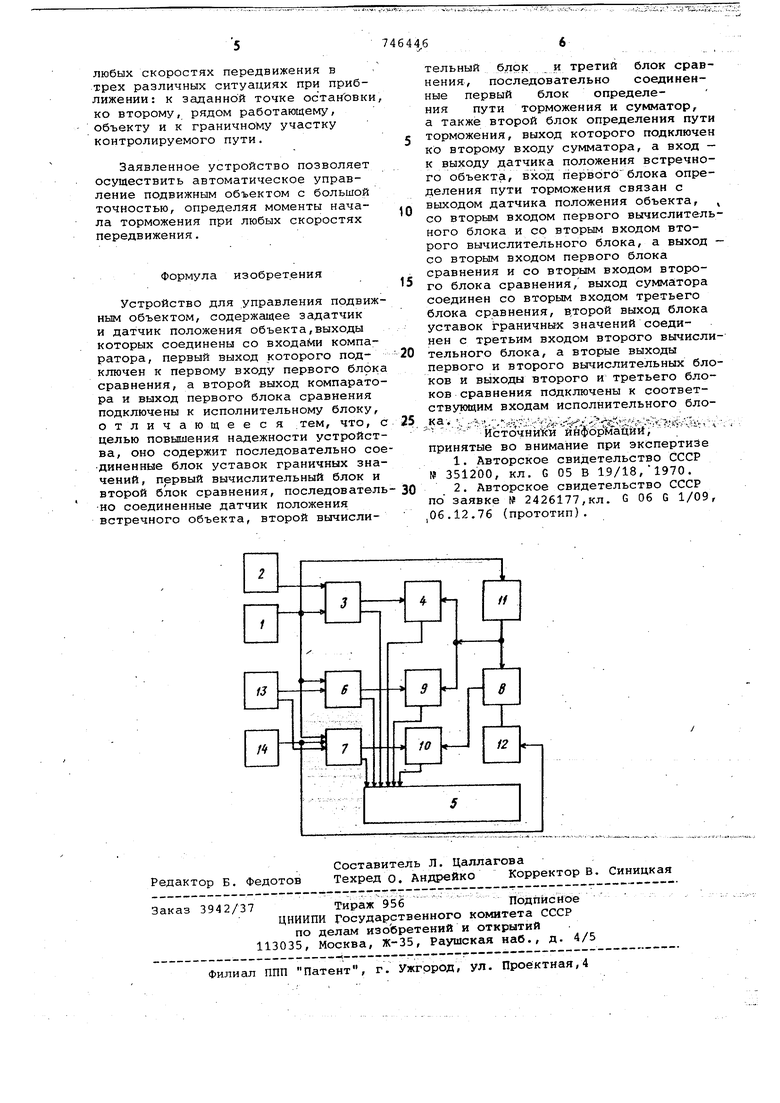
На чертеже представлена функцио нальная схема устройства.
Устройство содержит датчик 1 полоЖенйя ойъекта,: задат чик 2 положения 1Шмпаратор З, йЬёдйнен с первым ср ВнШйя 4,,который сОёдийен е-йспс лШ ё1Т 11Йй блОкЪ
-- .i-;;i.r :J:i-..- tV..i-:...,:....:u-. -.- .: . .
5 подвтГжного объектаТ Пёувый вычис;.литШьный ёлб1с 6, в т6р6Й вычислительный блок 7, сумматор 8,второй блок сравнения 9, третий блОк сравнения 10, первый блок определения пути торможения 11, второй бЛок Определения пути торможения 12, блок вок граничных значений 13 и датчик 14 положения Bctpe4rtoro объекта, Устройство работает следующим образойТ-- , «li .
Сигналы с датчика положения 1 -Й -Г§Й-йТ«и1 Г полЪженйя- виде дво йчных ,сйоТв т&тё 1с1цих фактическому и задайному участкам путй перёдвиженйя, -пЪст пают в компаратор 3, в резул ь га;ге чего на его выходе получае1гся йэйость, величйна -ЙОторЬй пути перемещения Ь6ъе Г®б заданноЙ точки. З акпОйучёнйОй давности orrpi jff m i m-y TKeH тля объ ё 1й з чаГёт зада11и я
выход кo ffiapaf6jpa У ffepiaaeTCH на ;±::ЙШ1Шии1гельныЙ блоГ да Г Ьмайд на
746446
движение объекта вперед или назад. Кроме компаратора 3, выход датчика .положения 1 подключен ко входу блока определения пути торможения 11, сигнал с которого сравнивается с сигналом рассогласования компаратора 3 в блоке сравнения 4, При равенстве сигналов вырабатывается сигнал на начало торможения объекта, который воздействует на исполнительный блок 5,
При достижении объектом заданного участка код рассогласования на выходе компаратора 3 становится равным нулю, в результате его вырабатывается команда стоп.
При наличии на пути управляемого объекта второго подвижного объекта сигнал- с датчика положения 1 складывается в вычислительном блоке 7 с кондтантой безопасности (код безопасного расстояния между объектами) блока уставок 13. Далее из результат сложения в вычисли;телЬном блоке 7 вычитается сигнал датчика 14 положения встречного объекта. Сигнал рассоглаЬЬвания затем поступает на один из входов блока сравнения 10, на второй вход которого подается сигнал с сумматора 8, в котором вырабатывается код суммы путем торможения упраляемого объекта и второго объекта.
Таким образом, при равенстве пути между объектами с -учетом безопасного расстояния и суммы путей их торможения с выхода блока сравнения 10 в исполнительный блок 5 поступает сигНал на начало торможения. При подъезде объектов друг к другу на минимально безопасное расстояние сигнал рассогласования с вычислительного блока 7 стайовится равным нулю, и в исполнительный блок выдается сигнал на останОвкуч объекта.
Аналогично устройство работает в случае движения объекта в направлении граничного участки контролируемого пути. Для предотвращения выезда объекта за пределы граничного участка сигнал с датчика положения 1 сравнивается в вычислительном блоке 6 с сигналом блока уставок 13,в котором вырабатывается код граничного участка. Далее сигнал рассогласования поступает на первый вход блока сравнения 9, на второй вход которого одновременно поступает сигнал с блока 11 определения пути торможения объекта,При равенстве сигналов блок сравнения 9 выдает сигнал на начало торможения,
В случае наезда объекта на граничный участок сигнал рассогласования вычислительного блока 6 становится равным нулю, и выдается команда на остановку объекта.
Таким образом, устройство для управления подвижным объектом обеспечивает надежное управление при
