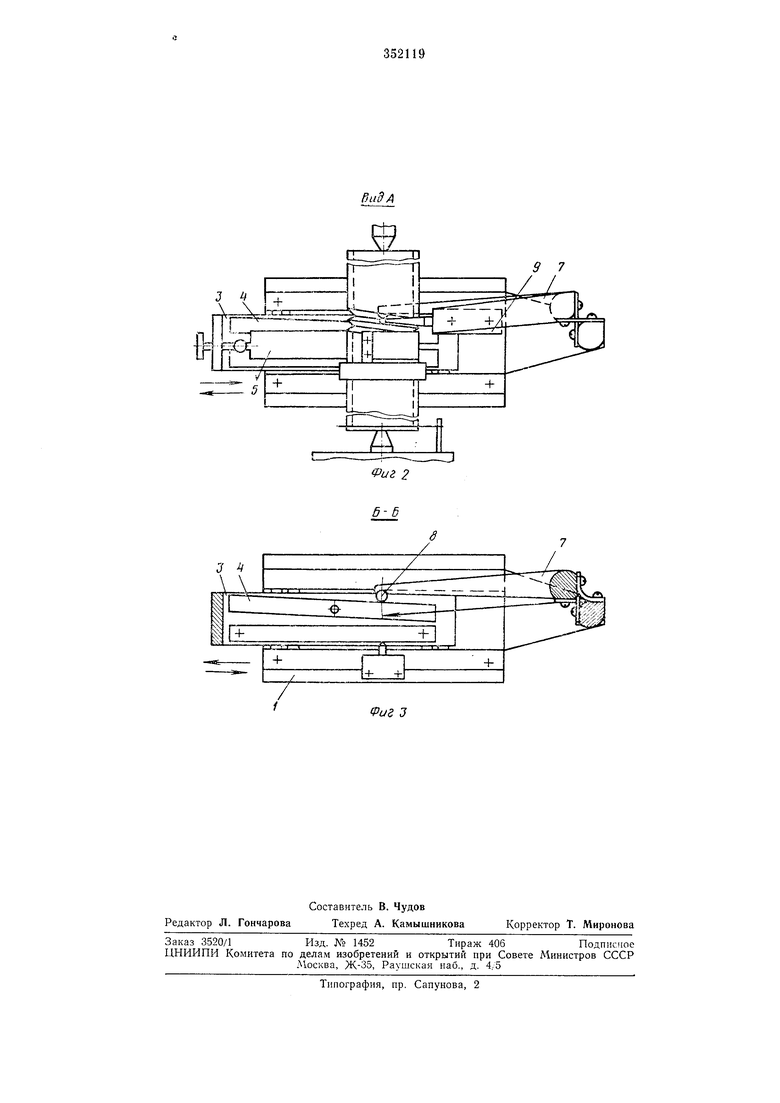
в технике линейных измерений в машиностроении известны устройства для контроля хода винтовой линии изделия, содержащие корпус с элементами базирования его относительно изделия, радиально подвижную каретку с синусной линейкой, ленту, один конец которой скреплен с кареткой, а другой охватывает цилиндрическую поверхность, соосную с изделием и скрепленную с ним, и узел осевого перемещения с контактирующим с синусной линейкой HaKOHe4HHKONt и скрепленным с ним датчиком, щуп которого контактирует с изделием. Узел осевого перемещения в известном устройстве выполнен в виде каретки, направляющие которой служат источником дополнительной погрещности. Само известное устройство является стационарным, что требует многократной перестановки винта с него на станок и обратно при доводке станка в процессе его сборки. Предложено узел осевого перемещения выполнить в виде рычага, ось поворота которого перпендикулярна к оси винта и к направлению движения каретки, элементы кинематической связи выполнены в виде хомутика, скрепляющего винт с концом ленты, наматываемым на поверхности винта, а элементы базирования - в форме, обеспечивающей крепление корпуса к столу резьбощлифовального станка. Это позволяет повысить точность измерения. На фиг. 1 схематично изображено предлагаемое устройство; на фиг. 2 - вид по стрелке А; на фиг. 3 - разрез по Б - .6 на фиг. 1. Корпус 1 своей базовой плоскостью устанавливается на стол резьбощлифовального станка и крепится к нему зажимом 2. В направляющих корпуса смонтирована поперечная каретка 3 с синусной линейкой 4. Лента 5 скреплена с кареткой 3, а другой ее конец зажат в хомутике 6, закрепляемом на проверяемом винте. К корпусу 1 на крестовом пружинном щарнире подвещен рычаг 7 с наконечником 8, контактирующим с синусной линейкой 4 и с датчиком 9, щуп которого контактирует с винтом. Ось щарнира перпендикулярна к оси винта и ходу каретки. При вращении винта лента 5 наматывается на его точную наружную поверхность и перемещает каретку 3. Синусная линейка 4 при этом поворачивает рычаг 7, несущий датчик 9, который выдает сигнал рассогласования между эталонным движением датчика и фактическим движением его щупа, следяющим за ходом впадины винта. Предмет изобретения
тами базирования его относительно изделия, поперечную каретку с синусной линейкой, ленту, скрепленную с кареткой, элементы кинематической связи ленты с изделием и узел осевого перемещения с контактирующим с синусной линейкой наконечником и скрепленным с ним датчиком, щуп которого контактирует с изделием, отличающееся тем, что, с целью повышения точности контроля внутришаговой погрешности ходовых винтов, узел
осевого перемещения выполнен в виде рычага, ось поворота которого перпендикулярна к оси винта и к направлению движения каретки, элементы кинематической связи выполнены в виде хомутика, скрепляющего виит с концом ленты, наматываемым на поверхности винта, а элементы базирования выполиены в форме, обеснечивающей крепление корпуса к столу резьбошлифовального станка.

| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для проверки винтовых линий глобоидальных червяков | 1961 |
|
SU146052A1 |
| Полуавтомат для заточки мелкомодульного многолезвийного инструмента | 1968 |
|
SU301030A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ФОРМЫ и РАСПОЛОЖЕНИЯ КОНТАКТНОЙ ЛИНИИ КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1972 |
|
SU356445A1 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Прибор для контроля прямолинейности образующей червяка | 1974 |
|
SU540128A1 |
| Устройство для шлифования профильных деталей широкой абразивной лентой | 1973 |
|
SU524677A1 |
| Установка для изготовления изделий из ленты | 1981 |
|
SU1178556A1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
| СПОСОБ И СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВЫХ ПОВЕРХНОСТЕЙ | 2000 |
|
RU2215634C2 |
J f
J it
J
9 7
Фиг J
