Изобретение относится к измерительной технике, в частности к приборам с программными кулачковыми механизмами.
Известен задающий механизм, например, програм.много регулирующего самопишущего потенциометра, у которого оси вращения пера, рычага с роликом, опирающегося на кромку программного кулачка, н задающей стрелки расположены на одной геометрической оси, и радиусы вращения пера, оси ролика и острия задающей равны между собой.
Однако указанный нз1вестный задающий механизм, решенный по кинематической схеме самого частного случая, предполагает использование при своем конструировании лишь определенных узлов -и деталей задающего механизма .и системы регуЛИ|рования, определенного их взаимного расположения и т. д., что ограничивает возможности .в применении других, более сО|Вершенных и более надежных узлов « датчиков (например, масляного реостатного датчика, раз.мещаемого в корпусе программного регулирующего потенциометра и входящего в схему внешнего электрического регулятора).
Для повышения надежности и увеличения срока службы предлагается задающий механизм программного регулирующего самопишущего потенциометра, в котором в качестве датчика использован реостатный масляный датчик, кинематически связанный через тягу со шпилькой коро.мысла, ось которой расположена при равповсспн входного моста электричесхого рсг лятора па геометрической оси вращения рычага с роликом н задающей стрелки, которая )ie совмеодепа с осью вращения пера.
Кроме того, радиус Бращения оси ролика вынолнен равным радиусу вращения острия задающей стрелки, а расстояние менаду осями вращения пера и осью ролика выполнено неравным разности радиусов вращення пера н оси ролика.
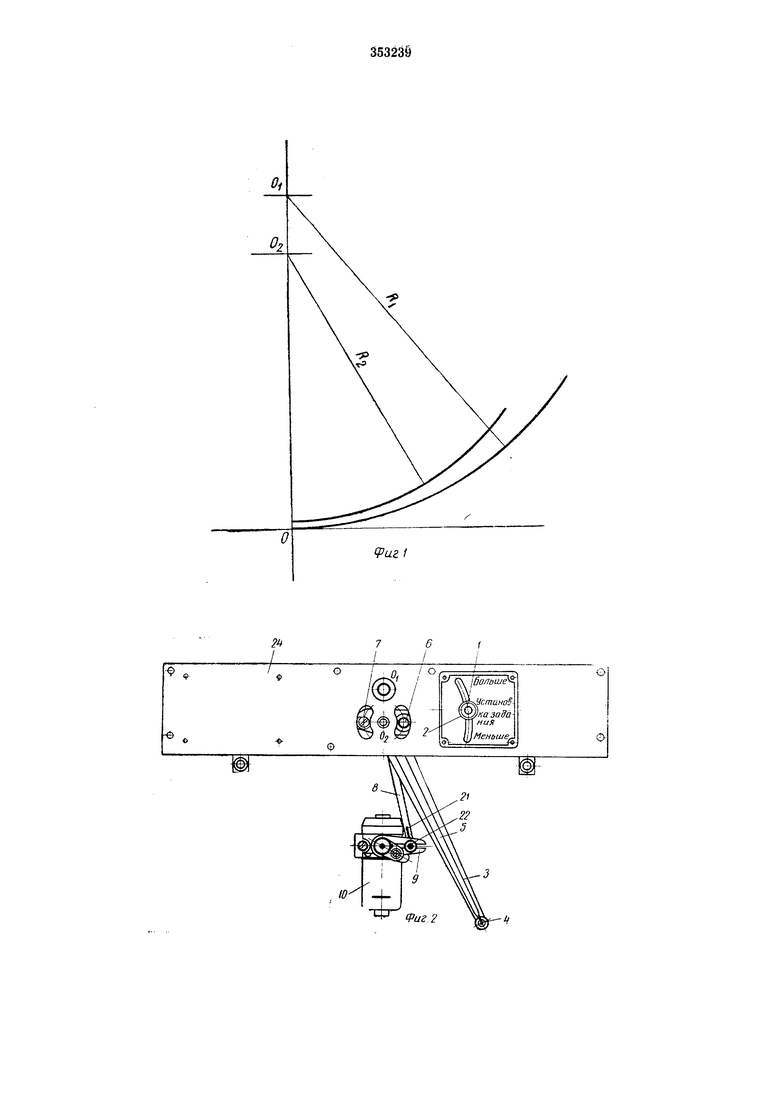
Задающий механиз.м, построенный по самой общей кинематической схеме (фиг. I), отличается от известного заданного механизма тем, что ось вращення 0 пера п ось вращения Ог рычага с роликом п задающей стрелки расположены на разных расстояниях от оси вращения О программного кулачка, т. с. OOj ООч, радиус вращения Ri пера и радиус вращения RZ оси ролика и острия задающей стрелки неравны между собой, т. е- Ri / Rzi разность расстояний указанных осей вращения от оси врандения кулачка неравна разности указанных радиусов вращения т. е- OiO ф ()Кинематическая схема известного задающего |Механизма представляет собой самый частный случай этой охемы, так как там О;02 О и
щий механизм с реостатным масляньш датчиком, обмотка которого находится .в среде ж идкого масла (обозначения .центров соответствуют фиг. 1); на фиг. 3 - задающий механизм, вид сзади и сверху.
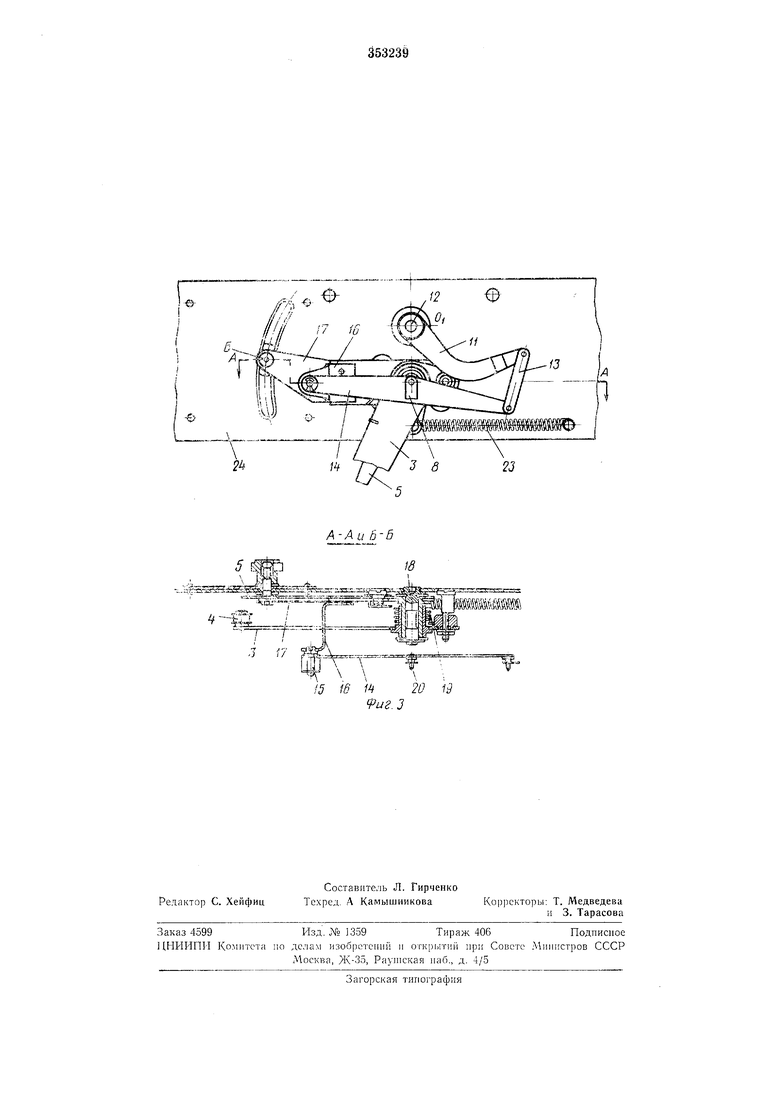
Шпилька 1, закренлбнная в нрорези гайкой 2, служит для ручной установки какого-либо фиксированного задания. При нрограммночм регулировании гайка 2 огнускается, и задание меняется автоматически согласно заданной программе посредством рычага 3 с роликом 4, катящимся но кромке вращающегося вместе с диаграммны м бланком программного кулач.ка, нрофиль которого определяет программу (:перо, диаграммный бланк и кулачок па чертежах не изображены). ШпllлlJкa / при этом .свободно ходит .в прорези. Острие задающей стрелки 5 показывает на диаграммном бланке заданное значение регулируемого параметра в каждый .момент времени. Для точиой установки положения задающей стрелки относительно положения пера слул«гг корректор 6. Корректор 7 служит для воздюжности совмещения оси ролика 4 с острием задающей стрелки 5. Тяга 6 соединяет задающий меха низм с рычагом 9 ползунка реостатного масляного датчика 10. Изогнутый рычаг 7/, жестко укрепленный на оси 12 пера (ие показанного на чертежах), связап тягой 13 с одним концом коромысла 14. Другой конец коромысла через ось 15 и изогйугый 16 связан ;с рычагом 17 задающей стрелки 5. 17 свободно сидит на пеподвижной оси 18 и при/ки.мается к рычагу 3, на котором укреплен ролик 4, пружиной 19. Положение рычага 17, а следовательно, « левого конца коромысла 14 будет определяться значенцем установленного задания, т. е. либо ноложбпием шнильки / в нрорези при ручном регулировании но фиксированным заданиям, либо положение. в задаииый .момент ро;1И-ка 4 рычага 3 на програм.мном кулачке нри .программном регулировании. Правый конец коромысла 14 занимает положение в соответствии с ноложенпем пера, т. е. со значением, которое :имеет измеряемый нараметр в данный момент. Шпилька 20 коромысла 14 снабжена тягой 8, на конце которой выполнена прорезь 21 (фиг. 2). В прорезь 21 входит палец 22, Соединяющий тягу S с рычагом .9 ползупка реостатного масляного датчика 10. Палец 22 всегда прижат к иижней кромке прорези 21 тяги 8. Пружина 23 поворачивает рычаги задающего механизма так, чтобы ролик 4 был всегда прижат к задающему
кулачку. Згщающи механизм смонтировап на плате 24, расположенной в верхней части поворотного шасси потенциометра, а реостатный масляный датчик 10 - в центральной части поiBopOTHoro щасси.
Задающий .механизм работает следующи.м образо.м. Еслм но-казания прибора соответствуют заданию, ось шпильки 20 С01впадает с геометрической осью оси /6. При этом рычаг 9
ползунка реостатного масляного датчика 10 находится в среднем положении, ползунок - точно на середине обмотки и входной мост электрического регулятора - в равновесии. Отклонение регулируемого параметра от задан ия вызывает изменение ноложения показывающей стрелки прибора и пера, и коро.мысло 14 поворачивается вокруг оси 15 в ту или другую сторопу. Если показание прибора меньще задания, щнилька 20 опускается ниже оси 18, тяга 8
онускается, и рычаг 9 ползунка реостатного масляного датчика 10 поворачивается по часо1ЮЙ стрелке. Если же показание прибора больще задания, шпилька 20 подпимается выще оси 18, тяга 8 поднимается и поворачивает рычаг .9 ползунка реостатного масляного датчика 10 против часовой стрелки.
П р е д м е т изобретения
1. Задающий механизм, например, програм.1ного регул.црующего самопищущего потенциометра, содержащий плату -с посадочным отверстием для установки пера, ,на которой укреплены рычаги и пружины, задающую стрелку, рычаг с роликоА, который опирается на кромку програм.много кулачка, и реостатный датчик, включенный в схему зходпого моста электрического регулятора, отличающийся тем, что, с целью повыщения надежности и
увелнчення срока службы, is не.м ;j качестве датчика использован реостатный .масляпый датчик, кине.атически связанный через тягу со нднилько коромыс,1а, ось которой .расположена при равновесии входного .моста электрического регулятора на геометрической оси вращения рычага с роликом и задающей стрелки, ivOTOpaH не совмещена с осью -вращения пера.
2.Механизм по п. 1, отличающийс.ч те.м, что радиус враще1шя оси ролика выполнен равным
радиусу вращения острия задающей стрелки.
3.Механизм по нн. i л 2, ит.гичающийся тем, что расстояние между осями вращения пера и оси ролика выполнено неразным разности радиусов вращения пера п ос; ролика.
9аг1
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Приспособление к ткацкому станку для выработки плотной ткани по утку | 1950 |
|
SU92309A2 |
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией самоходной машины | 1972 |
|
SU598784A1 |
| Машина для испытания подшипников на износ | 1938 |
|
SU56078A1 |
| Регулятор частоты вращения вала | 1986 |
|
SU1372285A1 |
| Устройство А.С.Кривовязюка для размещения стоп плоского материала | 1984 |
|
SU1222361A1 |
| Ленточно-шлифовальный станок | 1978 |
|
SU751591A2 |
| Глубинный прибор | 1983 |
|
SU1146430A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| АВТООПЕРАТОР | 1972 |
|
SU428916A1 |
24
I/
2k
A-Aii 5-6
.7 3& „
16 i 20 id
23
IS fug.3
