I
Изобретенне предназначено для загрузки агрегатных станков.
Известны автоонераторы, в которых между передающим и подающе-захватиыми органами установлена неразрывная кинематическая связь при помощи двух мальтийских крестов, связанных механизмом дифференииальнон или планетарной передачи.
Предлагаемый автооператор предназначен преимун ественно для загрузки деталей в приспособления, базирующие поверхности кото)ых расположены вертикально. Жесткая кинематическая связь в нем между передающим и захватывающим оргапами осуществлена проще.
Вращение от электродвигателя через редуктор передается валику, установленному в коромысле, нижний конец которого закреплен с помощью оси в корпусе автооиератора. На валик .насажены основной и вспомогательный кулачки. При вращении основной кулачок поворачивает коромысло Б ту или другую сторону и перемеп1ает связанный с коро.мыслом передающий орган. Всп.о.могательный :кулачок посредством рычага и тяги управляет захватывающим органо.м.
С целью осуществления передачи вращения от ненодвижного электродвигателя к установленному на подвижном коромысле основному кулачку одно из зубчатых колес передач11 расположено соосно с осью поворота коромысла.
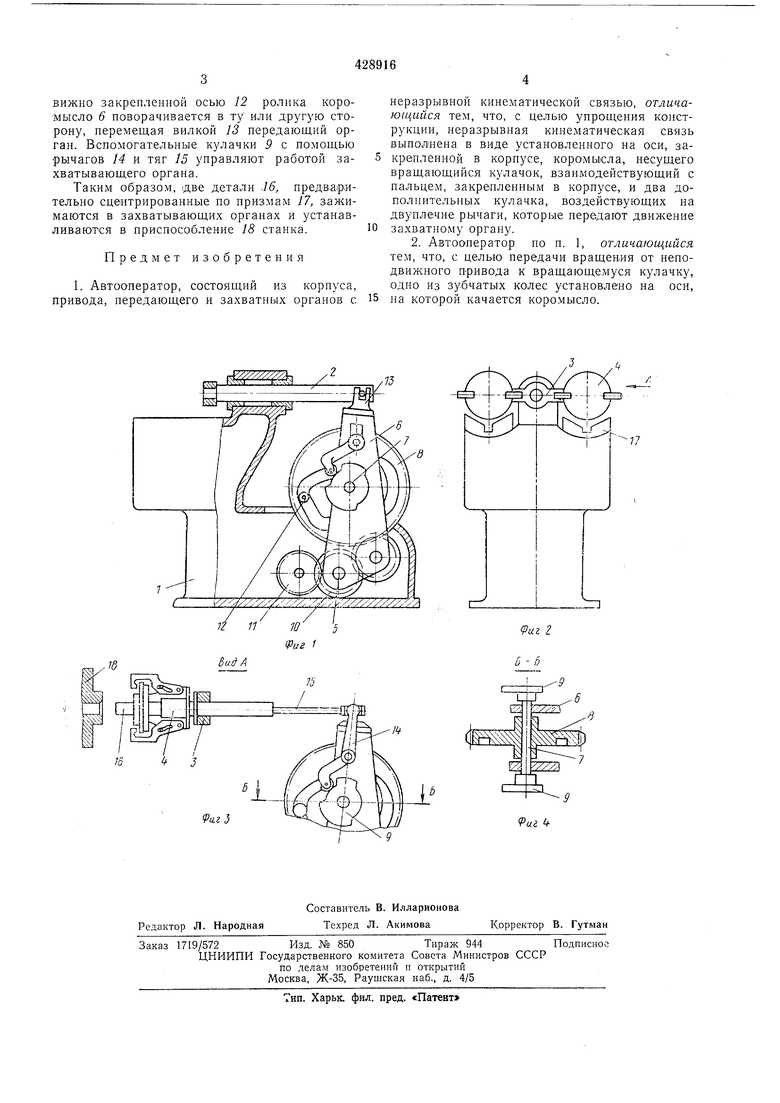
Па фиг. 1 показан предлагаемый автооператор, общий вид; на фиг. 2 - то же. вид сбоку; на фиг. 3 - вид по стрелке А на (j)Hr. 2 (зпхзатьжающнй oprain условно повернут на .90°); на фиг. 4 - разрез .по Б-Б на фиг. 3.
Автооператор состоит из /, передающего органа 2, на кронщтейне 5 которого с юнтированы два захватывающих органа 4, и ириво.аа. В корпусе на оси 5 }ттанозлено коромысло 6 коробчатой формы со свободно сидящим валиком 7, на котором закреплены основной 8 и два дополиительных 9 кулачка.
Зубчатое колесо 10, свободно установленное ita оси 5, зацепляется с нюстерней // выходного вала редуктора и посредством паразитного колеса - с зубчатым ве|щом основиого кулачка 8. Ось J2 закреплена неподвиж0но на корнусе, а ее ролик входит в фигурный паз основного кулачка 8. Вилка 13 соединена с передающим оргапом. Рычаги }4, установленные на внешних боковых гранях коромысла 6, соединены тягами 15 с захватывающим
5 органом 4.
Автооператор работает следующим образом. Вращение вала электродвигателя через редуктор передается зубчатому колесу 10 и ;и1лее - основному кулачку 8. В результате
30 взаи.одействия основного кулачка с непод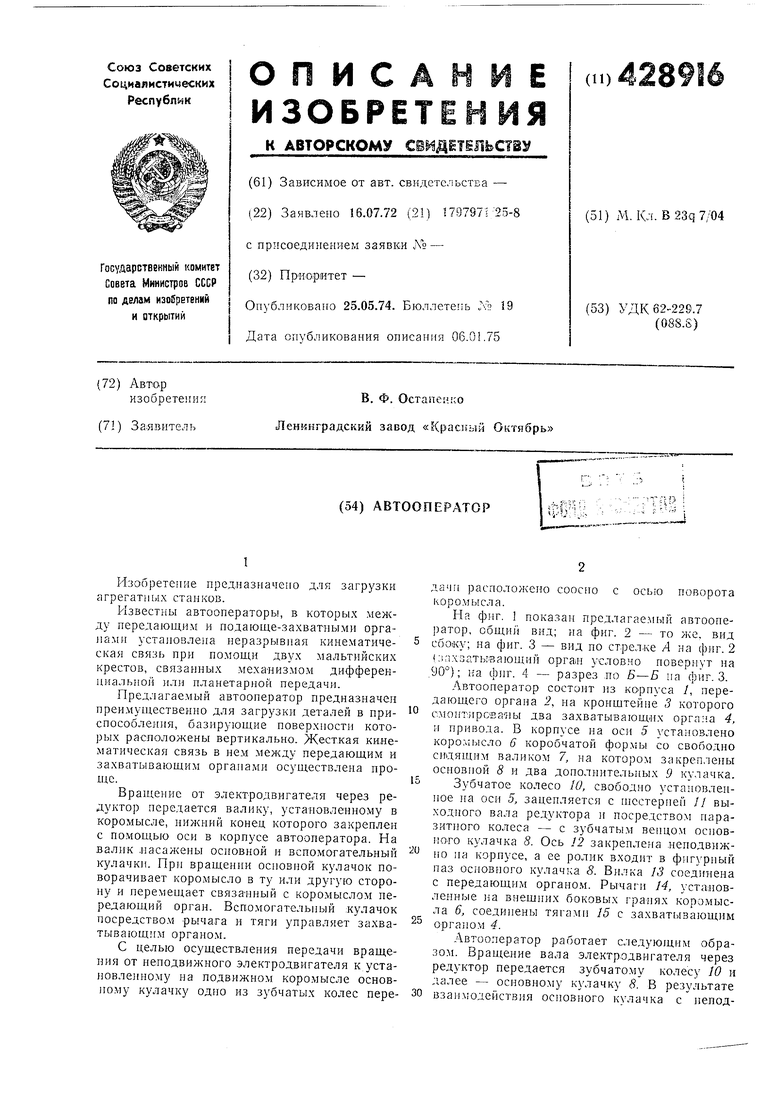
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| ФОТОКАМЕРА | 1992 |
|
RU2047206C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| АВТООПЕРАТОР | 1972 |
|
SU347161A1 |
| Устройство для создания сложного пространственного движения | 1990 |
|
SU1782674A1 |
| Автооператор | 1991 |
|
SU1805031A1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| НАМОТОЧНЫЙ СТАНОК ДЛЯ РУЛОННЫХ МАТЕРИАЛОВ | 1972 |
|
SU341899A1 |
