Изобретение относится к области автоматизации производственных процессов методами числового программного управления и может быть использовано для одновременного управления по разным программам металлорежущими станками, газорезательными аппаратами, автоматическими чертежными машинами, устройствами для намотки и т. д., т. е. в устройствах, где требуется управление перемещениями по координатам.
Известны интерполяторы, содержащие устройство ввода данных с подключенными к его выходу устройством задания скорости и интерполирующим устройством, с которым связано выходное устройство, а также устройство управления.
Недостатком этих интерполяторов является низкая производительность вследствие невозможности одновременного управления группой объектов по разным программам.
В предлагаемом интерполяторе, содержащем устройство ввода данных с подключенным к его выходу устройством задания скорости и интерполирующим устройством, к которому подключено выходное устройство, и устройство управления, соединенное с устройством ввода данных, интерполирующим устройством, выходным устройством и устройством задания скорости, интерполирующее устройство содержит регистры на линиях задержки, подключеиные через блок клапанирования ко входу блока сумматоров, соответствующие выходы которого соединены с коммутатором выходного устройства и через блок синхронизации - со входами регистров интерполирующего устройства, выходное устройство содержит блок распределения управляющих импульсов, один вход которого связан с выходом коммутатора, а другие - с выходами устройства задания скорости и со входом блока клапанирования.
Это позволяет повысить производительность и эффективность работы интерполятора.
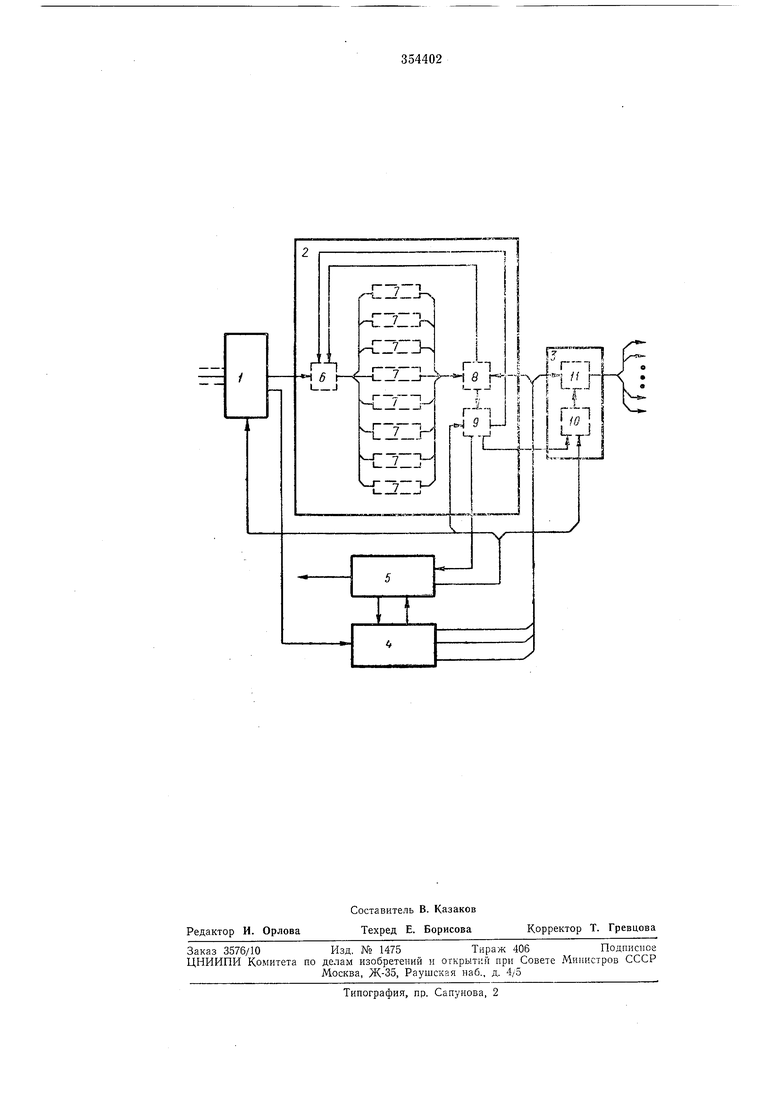
На чертеже показана блок-схема предлагаемого интерполятора.
Интерполятор содержит устройство / ввода данных, интерполирующее устройство 2, выходное устройство 3, устройство 4 задания скорости, устройство управления 5, блок синхронизации 6, блок линий задержек 7, блок клапанирования 8, блок сумматоров 9, коммутатор 10, блок 11 распределения управляющих импульсов.
Интерполягор работает следующим образом.
Возможность группового управления одним интерполятором по разным программам достигается разделением времени работы интерполятора между всеми управляемыми объектами, что достигается заменой в интерполирующем устройстве сдвиговых регистров, хранящих коды приращений по координатам, коды
текущих значений оценочных функций « коды счетчиков для контроля конца кадра, линиями задержки. Каждая линия задержки хранит столько кодов одноименных величин, сколько объектов в группе.
Программы работы всех управляемых объектов хранятся в запоминающих устройствах ЭВМ. Исходная информация по каналу связи подается на устройство ввода 1. С устройства ввода одна часть информации - коды скоростей- поступает на устройство 4 задания скорости, а другая часть - коды приращений по координатам и коды счетчиков контроля длины кадра - через блок синхронизации 6 поступает на линии задержки 7. Коды величин, хранящиеся в линиях задержки, непрерывно и последовательно поступают на входы блока клапанирования 8. На вторые входы этого блока поступают импульсы с устройства задания скорости. Если в момент поступления кодов величин, приписанных конкретному объекту, на вторые входы блока клапанирования 8 поступает импульс с рабочего канала, приписанного этому же объекту, устройства задания скорости, то коды с выхода этого блока подаются на входы блока сумматоров 9 и вычисляются новые значения оценочных функций и текущие значения кодов счетчиков контроля длины кадра. Если же импульс с рабочего канала не поступает, то вычисления не производятся и коды названных величин поступают через блок синхронизации 6 обратно на входы соответствующих им линий задержек 7. Коды вновь вычисленных значений оценочных функций н текущих значений счетчиков контроля длины кадра с выхода блока сумматоров 9 поступают через блок синхронизации на входы соответствующих им линий задержек, а знаки оценочных функций коммутатором 10 по командам с устройства управления 5 передаются в блок распределения импульсов. Этот блок распределяет поступающие на него импульсы с устройства задания скорости по координатам объектов.
По мере отработки информации, записанной в линиях задержки, она пополняется без остановки процесса интерполирования следующим образом. Блок сумматоров 9 фиксирует момент, после которого необходимо выдать на объект только один импульс, чтобы закончить кадр, вырабатывая сигнал, который поступает в устройство управления 5, формирующее команду запроса новой информации из ЭВМ. По этой команде в момент отработки последнего щага в кадре с ЭВМ поступает новая информация. Описанная выще работа устройства продолжается до полной отработки всех программ всех объектов.
Предмет изобретения
Интерполятор для числового программного управления оборудованием, содержащий устройство ввода данных с подключенными к его выходу устройством задания скорости и интерполирующим устройством, к которому подключено выходное устройство, и устройство управления, соединенное с устройством ввода данных, интерполирующим устройством, выходным устройством и устройством задания скорости, отличающийся тем, что, с целью повыщения производительности и эффективности работы, интерполирующее устройство содержит регистры на линиях задержки, подключенные через блок клапанирования ко входу блока сумматоров, соответствующие выходы
которого соединены с коммутатором выходного устройства и через блок синхронизации - со входами регистров интерполирующего устройства, вь1ходное устройство содержит блок распределения управляющих импульсов, один
вход которого связан с выходом коммутатора, а другие - с выходами устройства задания скорости и со входом блока клапанирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ I ПАШТ1;0'Г '•"'"Б'-^еЛИС | 1973 |
|
SU365688A1 |
| вСЕСОЮЗНАЯ I те , Y''"1*T'*''* *^-**'*^'l1'5t"'f^Jf 4 ftf | 1973 |
|
SU378805A1 |
| Устройство для контурного программного управления станком | 1978 |
|
SU716020A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Круговой интерполятор с оценочной функцией | 1976 |
|
SU638916A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР С ПЕРЕКЛЮЧАЕМОЙЛОГИКОЙ | 1969 |
|
SU256014A1 |