Как известно, при перемещении грузов на элеваторах первые проходят ряд транспоргеров последовательно с одного на другой. Все транспортеры, передающие в данный момент один поток груза, составляют один маршрут, Таких маршрутов на элеваторах бывает обычно несколько, причем для составления их транспортеры используются в различных комбинациях, т.. к что один и тот же транспортер может включаться в разные маршруты.
При внезапной остановке одного из транспортеров во время работы происходит остановка потока транспортируемого груза и последний начинает ссыпаться с леь1ты на пол.
Согласно предлагаемому устройству, для г,редотвраш,ения указанного недостатка, в устройстве транс ортеров предусмотрено приспособление для автоматической остановки всего маршрута при выходе из строя одного из транспортеров.
Суш;ность изобретения состоит в применении особых переключателей, устанавливаемых при составлении маршрута. Эти пер еключатели замыкают цепи, соединяюш,ие между собой приспособления для автоматической остановки двигателей транспортеров.
(372)
Изобретение предусматривает возможность выключения указанных приспособле.чий для автоматической остановки посредством специального выключателя.
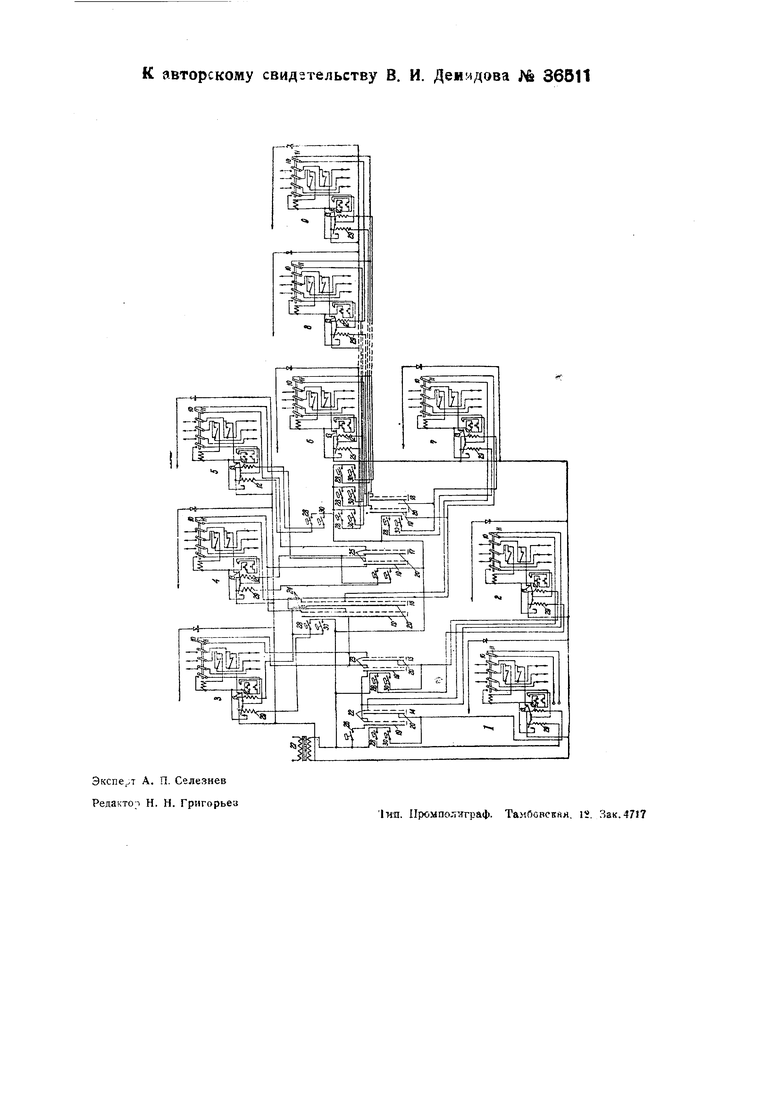
На чертеже изображена схема управления транспортерами зернового элеватора, на которой показаны автоматические переключатели для каждого из транспортеров 1, 2, У, 4, 5, 6, 7, 8, 9. Для примера взяты обычные электромагнитные выключатели. Рубильники 10 последних снабжены, помимо трех фазовых ножей и одного для цепи нулевой катушки, еш,е четвертым (на чертеже крайний справа) ножом 11. Последний может включен непосред твенно в цепь реле 12, включаюш,его автомат предыдущего транспортера, как это сделано для транспортеров 8 и 9. Если по какой-либо причине произойдет выключение двигателя у транспортера Э, то, при выпадении рубильника, замкнется через его нож 11 цепь, проходяш,ая через обмотку выключающего реле 12 автомата транспортера 8, и двигатель последнего также остановится, так как реле 12 .разорвет цепь нулевой катушки автомата, благодаря размыканию контакта 13. Выпавший рубильник а --томата транспортера 8, в свою очередь, своим правым ножом замкнет цепь выключающего реле еледующего транспортера и т. д., пока не будет остановлен весь маршрут.
Такая схема может быть применена в тех случаях, когда ряд транспортеров работает всегда в одной и той же последовательности.
В случае, если транспортеры могут подавать грузы не на один, а на несколько транспортеров, для установления связи цепей автоматической ост.)новин применены переключатели Ii, 15, 16, 17, 18, что и составляет сущность изобретения. В приведенной схеме такие переключатели применены для транспортеров 1, 2, о, 4, 5, U и 7. Каждый переключатель имеет два контактов и две тетки 19, 20, одна из которых 20 соединяет провода от кон:..:;тон 11 автоматических рубильникоз впереди (по ходу груза) лежащего транспортера с обмоткой |эеле 12 данного транспортера. Через вторую щетку Ы и соответственные контакты подается питание от источника тока 21 в цепь автомата. Допустим, нужно составить маршрут так, чтобы груз переходил по следовательно из транспортера 1 на транспортеры 2, У, 4 и х Дня этого щетки 19 и 20 переключателя i-i- ставятся на контакты 22, переключате1;я 15 - на контакты 23, переключателя 16- на | контакть: 24 и переключателя 17-lia контакты 25. После ттого нажимается 1 кнопка 2/, через которую подается напряжение от трансформатора 27 к ножу 11 автомата транспортера 1, а от I него параллельно-ко всем ножам li | остальных автоматов транспортеров 2, 3, 4 и 5. Таким образом, контакты Г1 всех транспортеров будут находиться под напряжением и, как только один из транспортеров остановится, например, транспортер 4, выключится рубильник автомата, замкнется цепь автомати- : ческой остановки двигателя транспортера 3 через контакт 11, контакты 24 и щетку 20 переключателя IS, обмотку реле 12 автомата транспортера 3 я второй конец обмотки трансформатора 27. Реле 12 сработает и выключит двигатель транспортера И. Выпавший рубильник последнего за ;кнет контакт 11, который, в свою очередь, замкнет цепь остановки транспортера ., : идущую от контакта 11, через контакт 2й
и щетку 20 переключателя 15 в обмотку реле 12 автомата транспортера 2. Точно так.им же образом остановившейся транспортер 2 остановит транспортер 1, т. е. весь маршрут остановится, кроме транспортера 5, который будет продолжать работать.
Цег1 азтоматич.ос ой остановки приводить и действие автомат не только при выключечии двигателя, но и при всяком другом нарушении нор мальной работы транспортера, например, при обрыве ленты, застопоривании груза на .,перепа,п..х и т. д. Для этого в соотвеггтву.ощих местах должны быть установ;1ен. контакты, включенные пара/лельно контактам И данного транспор ера
При раскомплектовании маршрута и необходимости составить новый размыкается к:юпка 23. подающая питание в цепь автоматической остановки, которая после этого перестает действовать. Затем, при помощи переключателей 14, 15, 16, 17 и 18 набирается дру1ой маршрут; транспортеры, входяи;ие в последний, пускаются в ход путем нажатия кнопки 28, замыкающих цепь пусковых реле .59 соответственных транспортеров. Затем включением кнопки 26 иепп авгоматической остановки приво,ч,:;;Сй в рабочее состояние.
rijCK и остановка дв.ателей могут бы;Ь произведены с помощь;о кнопок 28 и 30, включающих цепи обмоток реле 29 и 12. Кнопки 30 включены параллельно контактам 11 а.гсмзтоз тронспортеров.
Предмет изобретения.
Устройство для получения помаршрутного управления на расстоянии транспортерами элеватора, отличающееся те.м, что для автоматической остановки маршрута в случае остановки одного из транспортеров, входящего в данный IlapiupyT. применены устанавливаемые при составл.ении каждого маршрута соответствующие ему контакты П., замыкаю1цие цепи, соединяюш.ие между собой приспособ; ания для автоматической остановки двигате.тей транспортеров маршрута, ; аковые приспособле1- ия могут быть выключены кнопкой.