Изобретение относится к области подъемнотранспортной техники, а именно к захватным устройствам для подъема контейнеров двух типоразмеров.
Известны захватные устройства для подъема контейнеров двух типоразмеров, содержащие раму с монтированными на ней соединенными с приводом поворота рычагами, несущими захватные элементы и направляющие фиксаторы.
В таких захватных устройствах рама для измерения ее длины в соответствии с типоразMeipOM перегружаемого контейнера выполнена телескопической.
Целью изобретения является создание такого захватного устройства, которое проще по конструкции и, следовательно, более дешевое, а также обеспечивает перестройку на другой типоразмер без применения дополнительных механизмов и приборов.
Это достигается тем, что рычаги предлагаемого захватного устройства монтированы на вертикальных валах, а концы их отогнуты вниз и расположены ниже узла соединения рычагов с рамой, причем рычаги выполнены изогнутыми в горизонтальной плоскости в виде трапеции. В положении для захвата контейнера большего размера левая пара рычагов расположена выступающей средней частью наружу, правая - внутрь, а в положе2
НИИ для меньщего размера контейнера после поворота рычагов на 180° внутренние ве,ртикальные стенки левых рычагов и внешние вертикальные стенки правых рычагов расположены в одной вертикальной плоскости, проходящей через ось поворота рычагов.
Каледый направляющий фиксатор может быть соединен с приводом для его поворота вокруг вертикальной оси и приводом для его
подъема. Привод рычагов целесообразно выполнять в виде монтированных на их валах шестерен, связанных с силовыми цилиндрами посредством зубчатых секторов. Привод для поворота направляющих фиксаторов может быть выполнен в виде трособлочной системы, приводимой в действие рычагами в момент их поворота. Привод для подъема направляющих фиксаторов имеет вид связанной с силовым цилиндром рычажной системы.
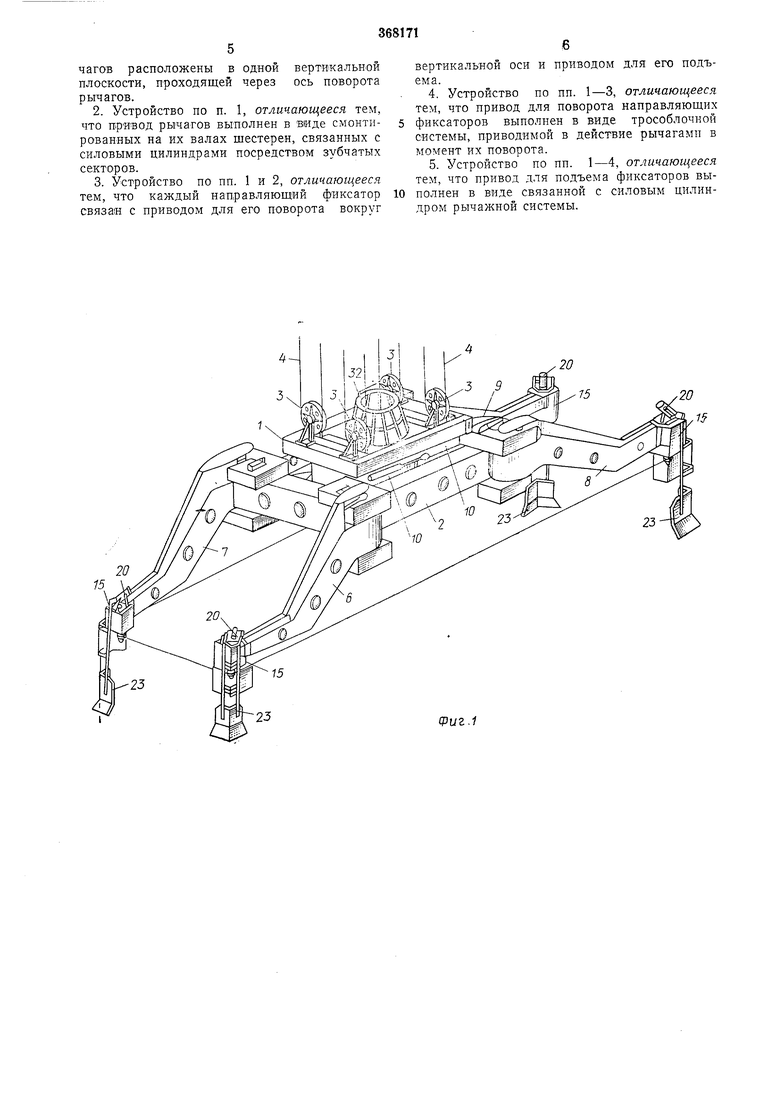
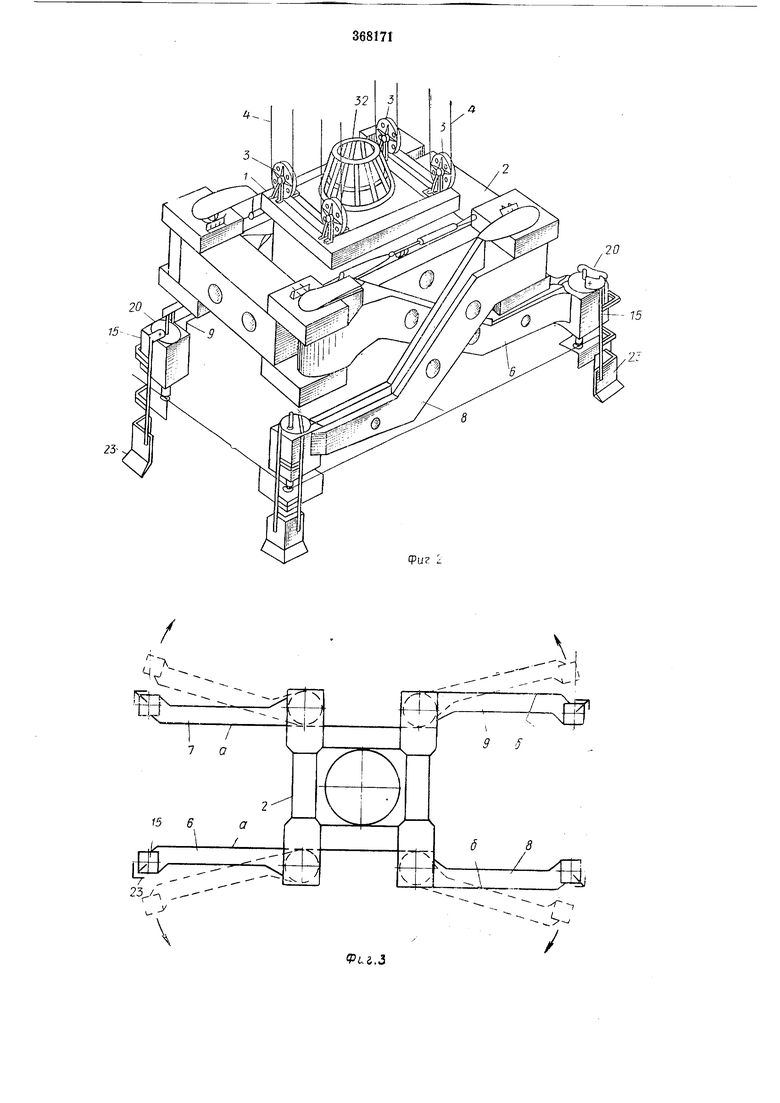
На фиг. 1 изображен общий вид описываемого захватного устройства в положении для контейнера большего размера; на фиг. 2 - то же, для контейнера меньшего размера; на
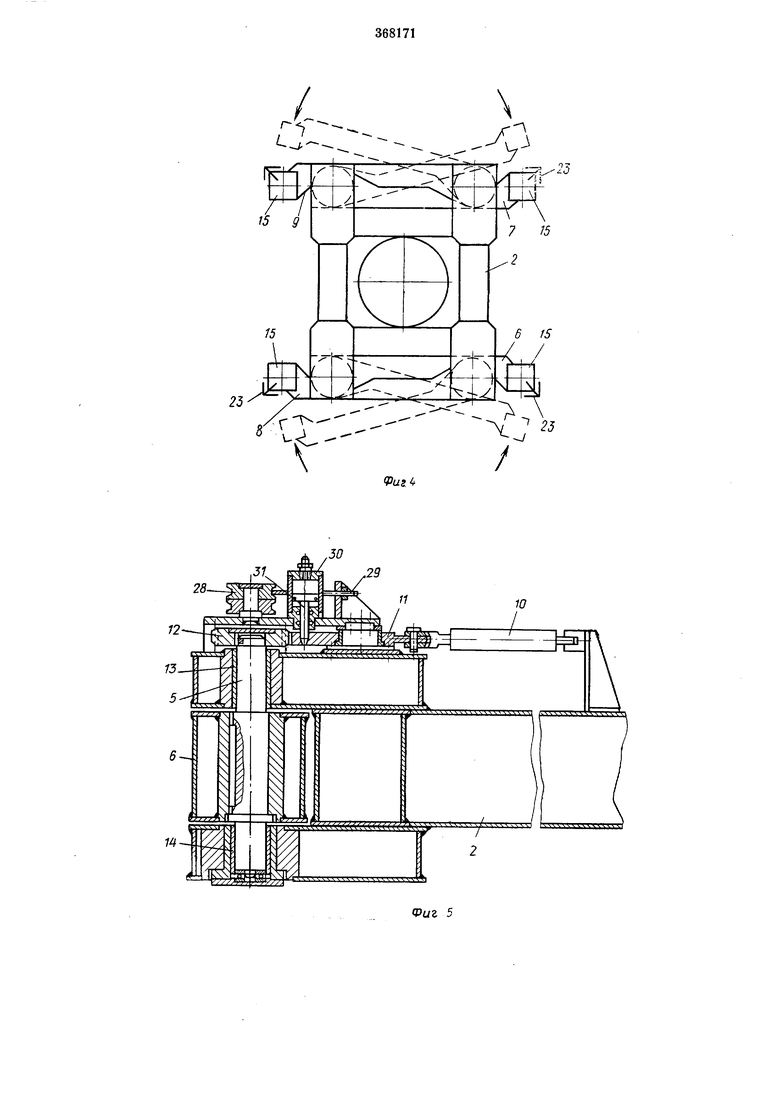
фиг. 3 - схема расположения рычагов при перегрузке контейнера большего размера; на фиг. 4 - то же, для контейнеров меньшего размера; на фиг. 5 - узел соединения рычагов с рамой и привод рычагов; на фиг. 6 -
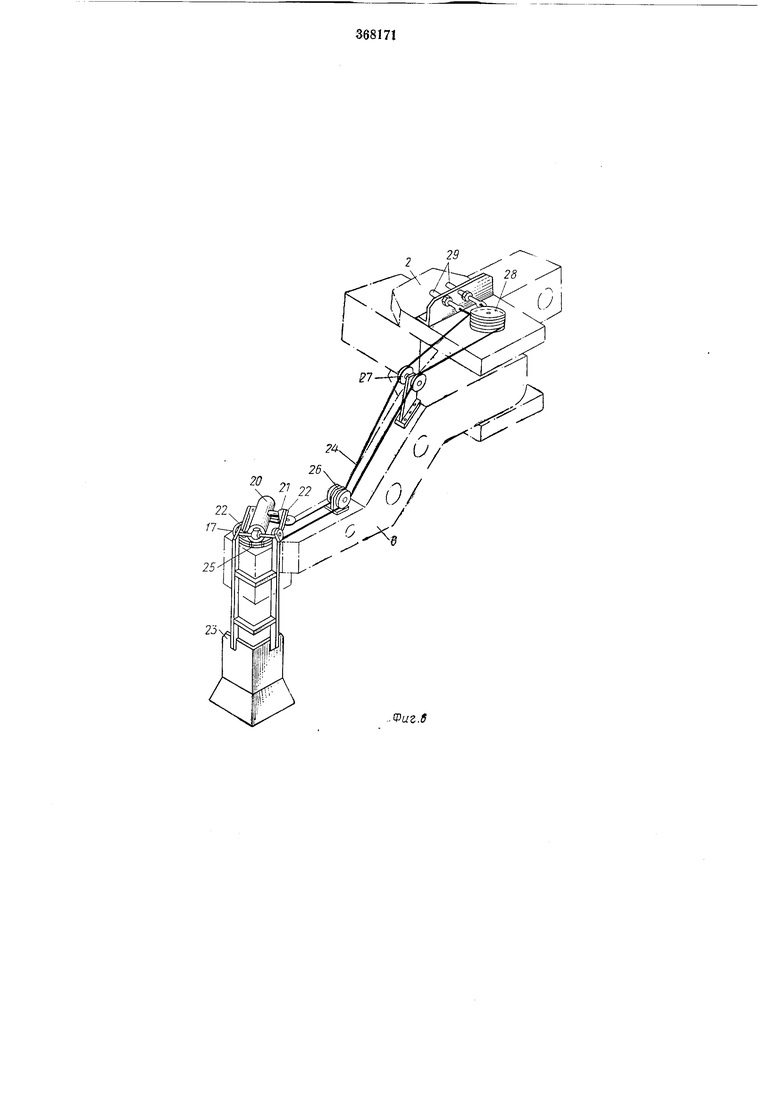
привод поворота направляющих фиксаторов;
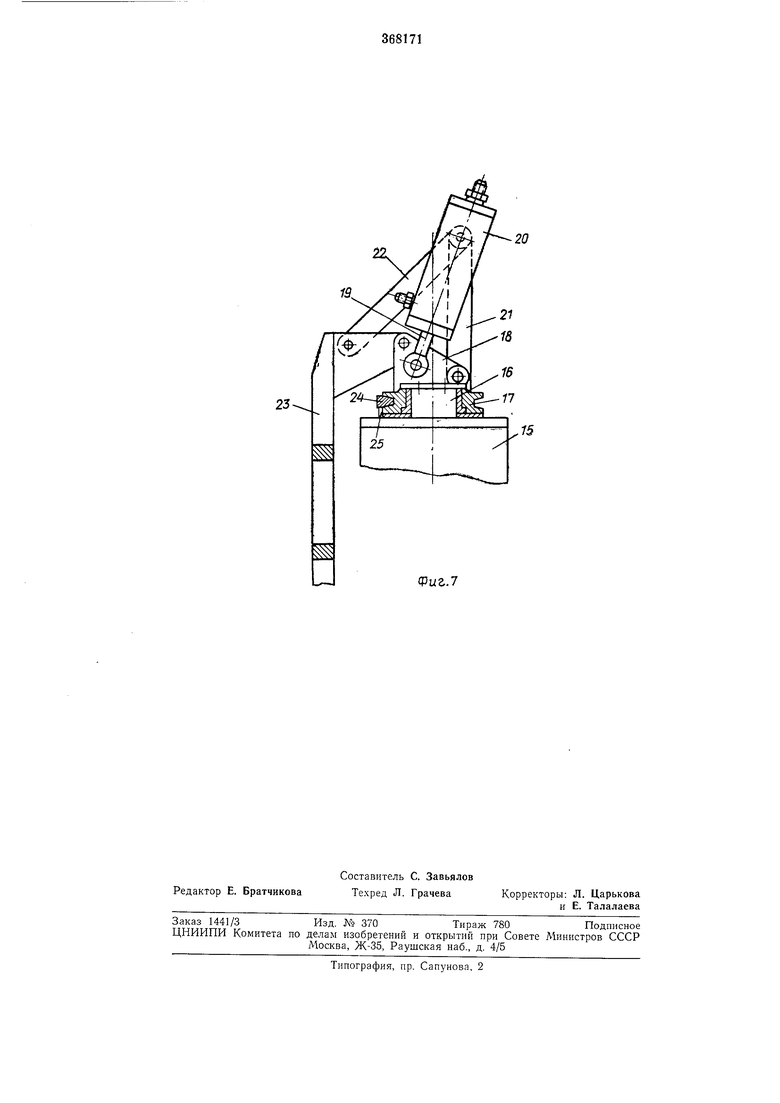
на фиг. 7 - привод подъема направляющих фиксаторов.
Рама захватного устройства состоит из верхней 1 и нижней 2 частей, которые могут поворачиваться относительно друг друга. На верхней части рамы / установлены блоки 3, огибаемые канатами 4, которые подвешиваются к прузоподъемному механизму (на чертежах не показан).
На нижней части 2 рамы по ее углам монтированы вертикальные валы 5, на которых установлены рычаги 6, 7, 8, 9. Эти рычаги могут поворачиваться в горизонтальной плоскости на 180° с помощью привода (в данном случае гидравлического).
Концы рычагов 6, 7, 8, 9 отогнуты вниз и расположены ниже узла соединения их с рамой. Рычаги изогнуты в горизонтальной плоскости в виде трапеции, и в положении для захвата контейнера большего размера левая пара рычагов 6 VL 7 расположена выступающей средней частью наружу, а правая 8 и 9 - внутрь. В положении же для меньшего размера контейнера, после поворота рычагов на 180°, внутренние вертикальные стенки а левых рычагов 5, 7 и внешние вертикальные стенки 6 правых рычагов 8, 9 расположены в одной вертикальной плоскости, проходящей через ось поворота соответствующих рычагов.
Такой изгиб рычагов в вертикальной и горизонтальной плоскостях обеспечивает разворот их относительно рамы для перестройки на другой типоразмер контейнера.
Привод поворота рычагов содержит четыре гадроцилиндра 10, каждый из которых связан с зубчатым сектором 11, находящимся в зацеплении с шестерней 12, сидящей на валу 5, установленном в подшипниках 13 и 14.
На конце каждого рычага установлены захватные головки 15 известной конструкции, например щтыковые. На верхней части головки 15 закреплена ось 16, несущая блок 17 трособлочной системы. На блоке 17 имеются приливы 18, к которым крепится щток 19 гидроцилиндра 20. С двух сторон корпуса гидроцилиндра 20 шарнирно закреплены звенья 21 и 22 рычажной системы. Звено 21 шарнирно связано своим свободным концом с приливом 18, а звено 22 - с направляющим фиксатором 23, который шарнирно соединен с приливом 18. Направляющие фиксаторы 23 центрируют захватное устройство относительно контейнера. Канат 24 огибает блок 17 и закреплен на ием планкой 25. Канат 24 огибает также блоки 26 и 27, установленные на рычагах. Концы каната 24 огибают горизонтальные обводные блоки 28, установленные на нижней части 2 рамы и закреплены посредством натяжных винтов 29. Оси блоков 28 совпадают с осями вращения рычагов.
Для надежного фиксирования рычагов в рабочем положении установлены гидроцилиндры 30, шток 31 которых фикоирует зубчатый сектор 11 относительно .рамы 2. На раме установлено устройство 32 для кабельного токоподвода.
Захватное устройство может находиться как в сложенном положении для работы с контейнерами меньшего размера, так и в развернутом положении для работы с контейнерами большего размера.
Перестройка грузозахватного устройства для работы с большим контейнером осуществляется следующим образом.
При включении привода поворота рычагов штоки гидроцилиндров 10 рычагов 6, 7 воздействуют на зубчатый сектор 11, который при своем движении поворачивает зубчатое
колесо 12, сидящее на валу 5. Вал 5 поворачивается вместе с установленным на нем. рычагом. Вначале разворачивается пара рычагов 6, 7 до тех пор, пока концы рычагов с захватными головками 15 не пройдут под рычагами S и 9. Затем включают гидроцилиндры 10 рычагов 8 и 9, поворачивая их. Рычаги поворачиваются до тех пор, пока захватные головки не установятся симметрично на одной оси, что достигается поворотом на 180.
Крайние рабочие положения рычагов ограничиваются конечными выключателями {на чертежах не показаны), управляющими гидроцилиндрами 30, щток 31 которых фиксирует рабочее положение рычагов через зубчатый сектор 11. При повороте рычагов канаты 24 обкатываются по блокам 28, вследствие чего изменяется длина каждой из ветвей, что влечет за собой поворот блоков 17 и закрепленного на нем направляющего фиксатора 23. Отношение диаметров блока 17 и 28 равно 2: 1, вследствие чего при повороте рычагов на 180° направляющие фиксаторы поворачиваются па 90°. При включении цилиндра 20 поднимаются направляющие фиксато-ры в вертикальной плоскости.
Перестройка захватного устройства для работы с контейнерами меньшего размера производится в обратной последовательности.
Предмет изобретения
1. Захватное устройство для подъема контейнеров двух типоразмеров, включающее в себя раму со смонтированными на ней соединенными с приводом рычагами, несущими захватные элементы и направляющие фиксаторы, отличающееся тем, что, с целью повыщения эффективности работы устройства, рычаги смонтированы на вертикальных валах, а
концы их отогнуты вниз и расположены ниже узла соединения рычагов с рамой, причем рычаги выполнены изогнутыми в горизонтальной плоскости в виде трапеции и в положении для захвата контейнера большего размера левая пара рычагов расположена выступающей средней частью наружу, правая - внутрь, а в положении для меньшего размера контейнера после поворота их на 180° внутренние вертикальные стенки левых рычагов
и внешние вертикальные стенки правых рычагов расположены в одной вертикальной плоскости, проходящей через ось поворота рычагов.
2.Устройство по п. 1, отличающееся тем, что привод рычагов выполнен в виде смонтированных на их валах шестерен, связанных с силовыми цилиндрами посредством зубчатых секторов.
3.Устройство по по. 1 и 2, отличающееся тем, что каждый направляющий фиксатор связан с приводом для его поворота вокруг
вертикальной оси и приводом для его подъема.
4.Устройство по пп. 1-3, отличающееся тем, что привод для поворота направляющих
фиксаторов выполнен в виде трособлочной системы, приводимой в действие рычагами в момент их поворота.
5.Устройство по пп. 1-4, отличающееся тем, что привод для подъема фиксаторов выполнен в виде связанной с силовым цилиндром рычажной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования пакетов круглых лесоматериалов | 1986 |
|
SU1370035A1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| Кантователь изделий | 1975 |
|
SU575304A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ С ФИТИНГАМИ | 2005 |
|
RU2291100C1 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| Лесопосадочная машина | 1987 |
|
SU1463163A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Мусоровоз | 1987 |
|
SU1463645A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
г
гЬ
,
У
.Л
28Г214
/
Ю
29
-Vuz.ff
Фиг.7
