1
Система автоматического управления с быстрой моделью объекта управления может быть использована для нахо:ждения оптимальных режимов различных объектов управления.
Известны системы автоматического управления, содержащие блок задания начальных условий, блок формирования сигнала управления моделью, вход которого связан с выходом быстрой модели объекта управления, а выход - с входом быстрой модели объекта управления и входом согласующего устройства, выход которого подключен к входу объекта управления.
Предлагаемая система отличается от известных тем, что ее блок задания начальных условий выполнен в виде преобразователя входных воздействий объекта в сжатые по времени сигналы, отражающие предысторию объекта. Кроме того, в нее иведеи экстраполяTOip возмущающих воздействий, входы кото.рого соединены с входами объекта управления, а выходы совместно с выходом блока задания начальных условий - с входами быстрой модели объекта управления, причем вход блока Задания начальных условий подключен к входу объекта управления.
Такое построение устройства позволяет упростить реализацию быстрой модели объекта управления.
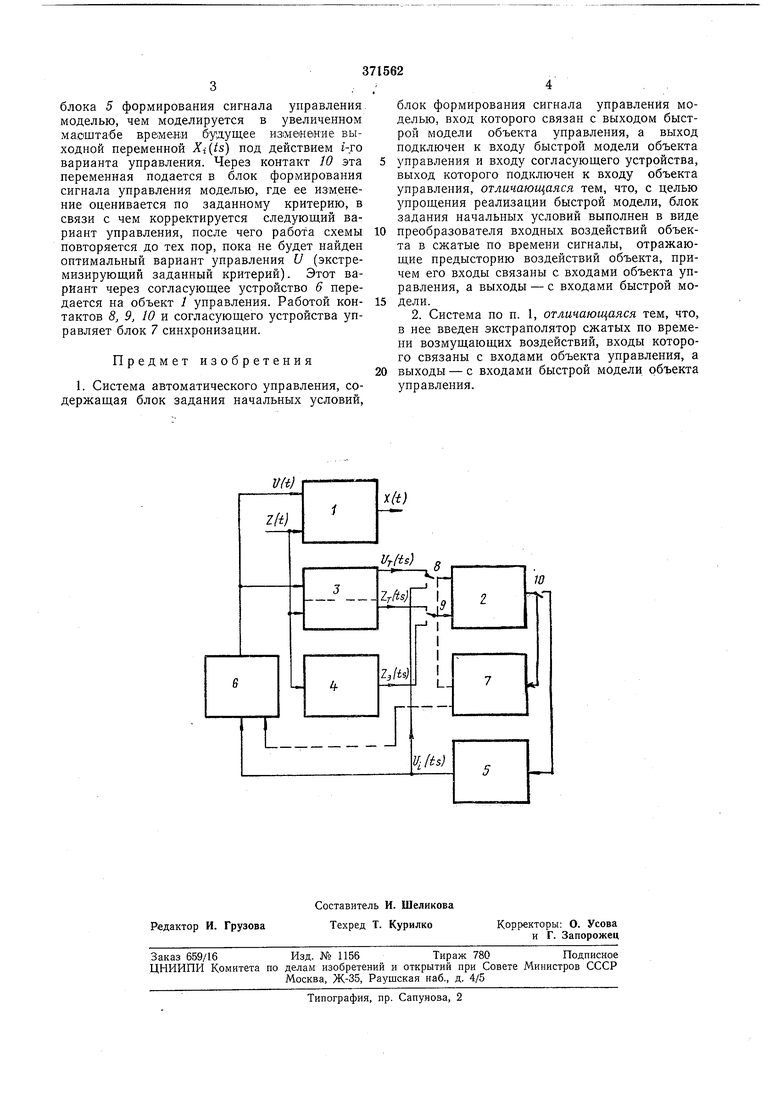
Блок-схема предлагаемой системы автоматического управления показана на чертеже.
Она содержит объект 1 управления, быструю модель 2 объекта управления, блок 3 заДания начальных условий, экстраполятор 4 возмущающих воздействий, блок 5 формирования сигнала управления моделью, согласующее устройство 6, блок 7 синхронизации, контакты 5, 5 и 10.
Приняты следующие обозначения: U(t) - управляющее воздействие; Z(t -возмущающее воздействие; s - масщтаб времени (); Гп - время переходных процессов в объекте; UT - сжатая предыстория управляющих воздействий; ZT - сжатая предыстория возмущающих воздействий; Zg - прогнозируемое возмущение; Ui - i-й вариант управления. Система работает следующим образом.
На быструю модель 2 объекта управления, через контакты 5 и 9 из блока 5 задания начальных условий подается сжатая предыстория входных воздействий /r(fs), ZT(ts) в течение времени . В момент задания начальных условий контакты S и 5 перебрасываются и на быструю модель объекта управления начинают поступать в течение времени прогнозируемое возмущение Z(ts) из экстраполятора 4 возмущающих воздействий
и один из вариантов управления i(s) из
блока 5 формирования сигнала управления моделью, чем моделируется в увеличенном масшта-бе вре|Меви будущее изагенание выходной переменной Xi(ts) под действием i-ro варианта управления. Через контакт 10 эта переменная подается в блок формирования сигнала управления моделью, где ее изменение оценивается по заданному критерию, в связи с чем корректируется следующий вариант управления, после чего работа схемы повторяется до тех пор, пока не будет найден оптимальный вариант управления U (экстремизнругощий заданный критерий). Этот вариант через согласующее устройство 6 передается на объект / управления. Работой контактов 8, 9, 10 и согласующего устройства управляет блок 7 синхронизации.
Предмет изобретения
1. Система автоматического управления, содержащая блок задания начальных условий.
блок формирования сигнала управления моделью, вход которого связан с выходом быстрой модели объекта управления, а выход подключен к входу быстрой модели объекта управления и входу согласующего устройства, выход которого подключен к входу объекта управления, отличающаяся тем, что, с целью упрощения реализации быстрой модели, блок задания начальных условий выполнен в виде
преобразователя входных воздействий объекта в сжатые по времени сигналы, отражающие предысторию воздействий объекта, причем его входы связаны с входами объекта управления, а выходы - с входами быстрой модели.
2. Система по п. 1, отличающаяся тем, что, в нее введен экстраполятор сжатых по времени возмущающих воздействий, входы которого связаны с входами объекта управления, а
выходы - с входами быстрой модели объекта управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального управления для объекта с запаздыванием | 1981 |
|
SU993206A1 |
| Устройство для автоматического управления процессом магнитного обогащения железных руд | 1987 |
|
SU1479106A1 |
| Адаптивная система управления | 1983 |
|
SU1174903A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| Система оптимального управления объектами второго порядка | 1978 |
|
SU744451A2 |
| Идентификатор возмущающих и управляющих воздействий | 1978 |
|
SU873209A2 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ) И СИСТЕМА (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2209443C2 |
10
