(5) СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТА С ЗАПАЗдаВАНИЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
1
Изобретение относится к автомати ческому экстремальному управлению объектами с запаздыванием, имеющими контролируемые управляющее и внешнее воздействия, ненаблюдаемое внешнее воздействие, наблюдаемую и регулируемую выходные переменные и может быть использовано в металлургической промышленности, в частности, в системе управления плавкой стали в мартеновской печи.
Известна система автоматического управления, содержащая объект управления, а также последовательно соединенные первый блок сравнения, второй блок сравнения, регулятор, модель , блок задержки, третий блок сравнения, выход которого соединен с вторым входом второго блока сравнения. Выход регулятора соединен с входом объекта управления, выход которого подключен к входу первого блока сравнения, а выход модели объекта соединен с вторым входом третьего блока сравнения 3Недостатком системы автоматического управления является неудовлетворительная точность управления, обусловленная отсутствием учета действия на объект управления контролируемых возмущений.
Наиболее близкой по технической сущности к предлагаемой является
10 система экстремального управления для объектов с запаздыванием, содержащая блок синхронизации, последовательно соединенные блок задания начальных условий, первый ключ,
15 первую модель, второй ключ, блок управления, блок согласования и последовательно соединенные первый экстраполятор и третий ключ, соединенный выходом с вторым входом первой
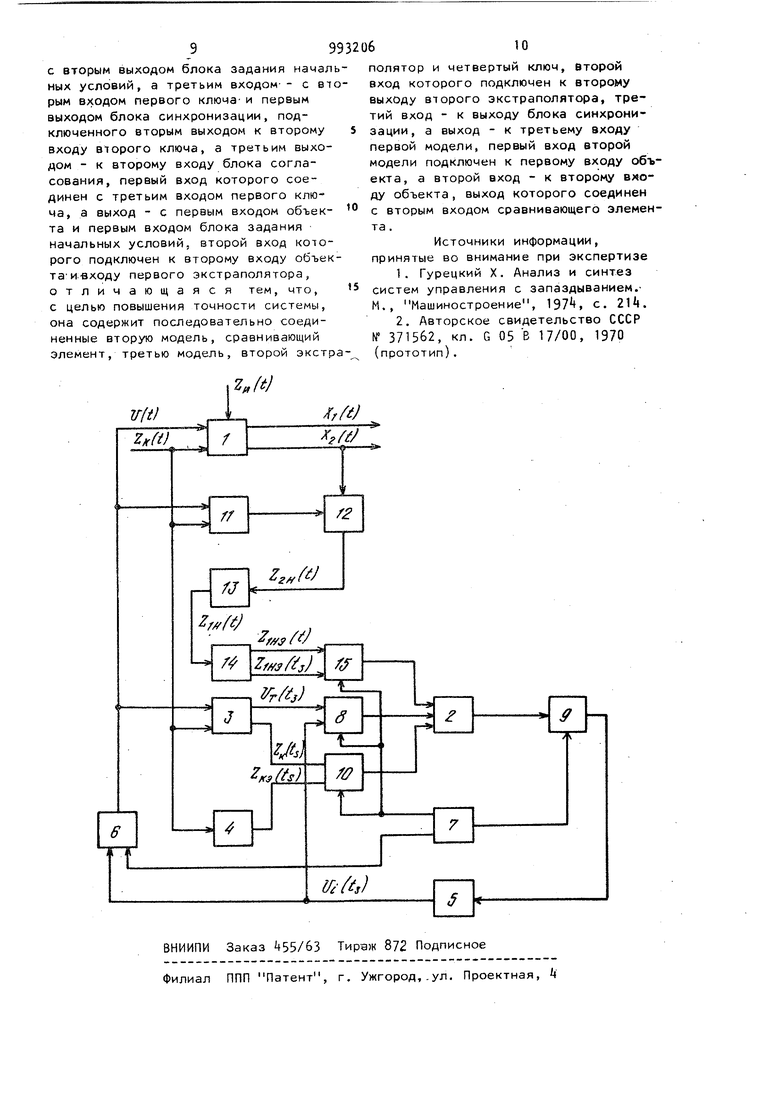
20 модели, вторым входом - с вторым выходом блока задания начальных условий, а третьим входом - с вторым входом первого ключа и первым I 9 выходом блока синхронизации, подключенного вторым выходом к второму входу второго ключа, а третьим выходом - к второму входу блока согласования, первый вход которого соединен с третьим входом первого ключа, а выход - с первым входом объекта и с первым входом блока задания начальных условий, второй вход которого подключен к второму входу объекта и входу первого экстраполятора f2J. К недостаткам этой системы автоматического управления относится низ кая точность управления, обусловленная отсутствием учета действия на объект управления ненаблюдаемых возмущений . Цель изобретения - повышение точности системы. Поставленная цель достигается тем что она содержит последовательно сое диненные вторую модель, сравнивающий элемент, третью модель, второй экстр полятор и четвертый ключ, второй вхо которого подключен ко второму выходу второго экстраполятора, третий вход к выходу блока синхронизации, а выход - к третьему входу первой модели первый вход второй модели подключен к первому входу объекта, а второй вход - к второму входу объекта, выхо которого соединен с вторым входом сравнивающего элемента. f-ia чертеже представлена блок-схема системы управления Система управления содержит объект 1, первую модель 2, блок 3 задания начальных условий, первый экстра полятор , блок 5 управления, блок 6 согласования, блок 7 синхронизации первый ключ 8, второй ключ 9, третий ключ 10, вторую модель 11, сравнивающий элемент 12, третью модель 13, второй экстраполятор 14, четвертый ключ 15. В схеме приняты следующие обозначения : управляющее воздействие; контролируемое возмущение ненаблюдаемое возмущениеj X(t) - регулируемая выходная пер менная объекта управления наблюдаемая выходная переменная объекта управлени сжатая предыстория управляющего воздействия; Z (t )- сжатая предыстория контро лируемого возмущения. ()- сжатая траектория прогнозируемых значений контролируемого возмущения-, значение ненаблюдаемого возмущения приведенного к регулируемому выходу, значение нелаблюдаемого возмущения, приведенного к наблюдаемому выходу объекта , прогнозируемые значения ненаблюдаемого возмущения, приведенного к регулируемому выходу объекта; z (t.)сжатая траектория прогнозируемых значений ненаблюдаемого возмущения приведенного к регулируемому выходу объекта; )- сжатая траектория i-ro варианта управляющего воздействия;--масштаб времени (S 1); -время переходных процессов в объекте; -текущее время, -время запаздывания объекта по возмущению. Система автоматического управления работает следующим образом. На входы объекта 1 и второй модели 11 поступают сигналы об управляющем воздействии V(t) и о контролируемом возмущении Z(t) , Вторая модель объекта П предназначена для определения реакции объекта 1 управления по наблюдаемой выходной переменной X(t) на действие контролируемого возмущения Z,(t) и управляющего воздействия V(t) и работает в реальном масштабе времени. С выхода второй модели объекта 11 на первый вход сравнивающего элемента 12 подается сигнал с модельном значении наблюдаемой выходной переменной объекта управления X(t). Сравнивающий элемент 12 путем вычитания сигнала из сигнала о фактическом значении регулируемой выходной переменной X«(t), поступающего с выхода объекта 1 управления, формируется сигнал о приведенном к наблюдаемому выходу объекта ненаблюдаемого возмущении Z(t). Сигнал (t) с выхода сравнивающего элемента 12 поступает на вход третьей модели объекта 13, где си1 нал (t) пересчитывается в оценку
влияния того же ненаблюдаемого возмущения на регулируемый выход объекта управления .( (t). Сигнал с выхода третьей модели 13 объекта поступает на вход второго экстраполятора 1, который прогнозирует траекторию изменения ненаблюдаемого возмущения приведенного ж регулируемому выходу объекта на интервале времени (t+T, t+T+Tr,).
Второй экстраполятор 14 имеет два выхода. С первого выхода второго экстраполятора 14 на первый информационный вход четвертого ключа 15 подается сигнал о прогнозируемом значении ненаблюдаемого возмущения Z..(t) на момент времени t+i;. С второго выхода на второй информационный вход того же ключа поступает сигнал о прогнозе сжатой во времени в масштабе S траектории изменения ненаблюдаемого возмущения чнэ(с) интервале времени (t+t, t+TVTf,).
Сигналы о контролируемом возмущении Zn(t) и об управляющем воздействии поступают также на вход блока задания начальных условий 3 который осуществляет запоминание и выдачу сжатых во времени, в масштабе S, тра екторий изменения этих сигналов,
С первого выхода блока задания начальных условий 3 на первый информационный вход первого ключа 8 подается сигнал сжатой во времени в мас штабе S траектории изменения управляющего воздействия ), а с второго выхода на второй информационный вход третьего ключа 10 подается сигнал о сжатой во времени (в масштабе S) траектории изменения контролируемого возмущения Z(t,-.i.
Сигнал о контролируемом возмущении 2(t) поступает на вход первого экстраполятора 4, который осуществляет прогноз сжатой во времени в масштабе S траектории изменения контролируемого возмущения ) на интервале времени (t, t+T) . Сигнал с выхода первого экстраполятора k поступает на первый информационный вход третьего ключа 10.
Работа остальной части схемы происходит циклически. Формирование цикла осуществляет блок 7 синхронизации, путем управляющих сигналов на управляющие входы согласующего устройства 6 и ключей 8, 9,
10 и 15- Каждый цикл состоит из двух интервалов временидлительностью интервала задания начальных условий и интервала прогноза. 5 На первом интервале времени проис ходит задание начальных условий. При этом сигналами с выхода блока 7 синхронизации ключи В, 9, 10 и 15 устанав ливаются в следующие позиции. Вто10 рой ключ 9 разомкнут.
Первый ключ 8 соединяет первый выход блока 3 задания начальных условий с первым входом первой модели 2 объекта, четверУый ключ 15 соедиts няет первый выход второго экстраполятора 14 с третьим входом первой модели объекта.
При этом на входы первой модели объекта 2 с выходов блока задания 20 начальных условий 3 поступают сигналы о сжатой предыстории изменения управляющего воздействия V(t:g} и контролируемого возмущения /-(ц), а также, в отличие от прототипа, на 25 третий вход первой модели объекта 2 с первого выхода второго экстраполятора 14 через четвертый ключ 15 постуг-ает сигнал о прогнозируемом на текущий момент времени значении 30 ненаблюдаемого возмущения ).
Первая модель объекта 2 работает в ускоренном масштабе времени и предназначена для определения реакции объекта 1 управления по регулируемой JJ переменной на действие входных воздействий. В конце первого интервала времени на выходе первой модели объекта 2 устанавливаются искомые начальные условия. При этом обеспечивается боQ лее точная установка начальных условий по отношению к прототипу за счет дополнительного учета влияния на объект 1 управления ненаблюдаемых возмущений, путем использования инфорj мации о наблюдаемой выходной переменной X(t) .
На втором интервале времени осуществляется расчет оптимального варианта управления на ближайший цикл работы системы.При этом сигналами с
0 выхода блока 7 синхронизации ключи В, 9. 10 и 15 устанавливаются в следующие позиции. Второй ключ 9 замкнут. Первый ключ 8 соединяет выход блока 5 управления с первым входом первой
5 модели объекта 2, третий ключ 10 соединяет выход первого экстраполятора 4 с вторым входом первой модели объекта 2, четвертый ключ 15 соединяет 7 второй выход второго зкстраполято ра 1 с третьим входом первой модезл объекта 2. Блок 5 генерирует вариан ты сжатых во времени траекторий управления V (t ) на иг тервале времен t, t+T. Каждый варианч; управления (tc;) подается через первый ключ о .- гО на первый вход nepeos-i модели объекта 2, на остальные входы которой Через ключи 10 и 1ч Г0ступа:от соответственно сигналы о сжатых во времени прог(-1озируемь х траекчприях кон тролируемого Zi/ tij) и ненаблюдаемого возиущеьжй -- jjialtg) на том we интервале времени ft , t+Tp) . С помощью первой модели объекта 2, работаюи ей в ускоренном масштабе зреме ни определяется реакция объекта 1 управления по регулируемому выходу объекта на воздейстаи я / (t,,) , Учь в отличие m рототипа на третий зход первой модели объекта 2 с второго выхода второго зкстраполятора 1 через четвертый ключ 15 поступает сигнал о прогнозе ока юй во времени траектории изменения ненаблюдаемого возмущения /;,,„( t,.-, ) . Это позволяет осуидествить более точный прогноз реакции объекта упрае;ления 1 за счет дополнительного учета вли яния этого возмущения. В блоке 5 управления осуществляется расчет заданного критерия качества управления ,аля каждого варианта управления ( выбор и запоминание варианта, обеспечивающего движение в направлении достижения экстремального значения этого критерия . Описанные действия повторяются до тех пор, пока не будет найден оптимальный вариант управления, экстремизирующий заданный критерий. Этот вариант через согласующее устройство 6 подается на объект 1 управления . Техническая реализация моделей объекта 2 и 11, 13 определяется сво ствами конкретного объекта и может быть наполнена, например, в виде це пей, собранных на RC-цепочках, опер ционных усилителях и блоках задержки . Экстраполяторы i и 1 могут бы реализованы на основе форсирующих звеньев и ячейках памяти. В качеств элементной базы блока 3 задания начальных условий могут быть использо ны ячейки памяти и ключи. 6 управления может быть peaлигован на Ьазе генераторов функции, ИНТ eipaiopoe 5 квадраторов, блоков сравненияS ячейках памяти. Ключи могут быть выполнены на основе реле. Таким образом, в отличие от прототипа введение в систему автоматического управления второй модели объекта 11, сравнивающего элемента 12, третьей модели объекта 13, второго экстраполятора 1 и четвертого ключа 5 позволяет при определении оптимальных режимов функционирования объекта управления учесть влияние не только контролируемых, как в прототипе, но и ненаблюдаемых возмущений за счет использования информации обизмерении наблюдаемой выходной переменной и как следствие этого повысить точность управления. При использовании предложенной системь для управления периодом дозодки мартеновской плавки стали с пеприменением метода имитационного мо.(елирования в качестве наблюдаемых выходных переменнь1Х принять информацию о температуре насадок, свода, давлении под сводом. При этом по сравнению с прототипом система позволяет повысить частоту попаданий в заданную область зна1- ен-.-1й по содержанию углерода и температуре металла в период доводки мартеновской плавки на 4%. Это приводит к у|1еньшению числа плавок с корректиРУЮ1ЦИМИ операциями по устранению отклонений фактииеских значений выходных переменных от заданных и, вследствие этого, к сокращению средней продолжительности плавки на 6,5б мин и повышению производительности агрегата на 0;97 S также к снижению удельного расхода руды и мазута на 0,1Ьб кг/т и 0,328 кг/т, соответственно , Формула изобретения Система экстремального управления для объекта с запаздыванием, содержаи ая блок синхронизации, последовательно соединенные блок задания начальных условий, первый ключ, первую- модель, второй ключ, блок управления, блек согласования и последовательно соединенные первый экстраполятор и третий ключ, соединенный выходом с вторым входом первой модели, вторым входом с вторым выходом блока задания начал ных условии, а третьим входом-- с вт рым входом первого ключа- и первым выходом блока синхронизации, подключенного вторым выходом к второму входу второго ключа, а третьим выходом - к второму входу блока согласования, первый вход которого соединен с третьим входом первого ключа, а выход - с первым входом объекта и первым входом блока задания начальных условий, второй вход которого подключен к второму входу объек та- и -входу первого экстраполятора, отличающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные вторую модель, сравнивающий элемент, третью модель, второй экстр
///4/
да 6 и четвертый ключ, второй полятор вход которого подключен к второму выходу второго экстраполятора, третий вход - к выходу блока синхронизации, а выход - к третьему входу первой модели, первый вход второй модели подключен к первому входу объекта, а второй вход - к второму входу объекта, выход которого соединен с вторым входом сравнивающего элемента . Источники информации, принятые во внимание при экспертизе 1.Турецкий X. Анализ и синтез систем управления с запаздыванием. М., Машиностроение, Э7, с. 2U. 2.Авторское свидетельство СССР (f 371562, кл. G 05 В 17/00, 1970 (прототип).
