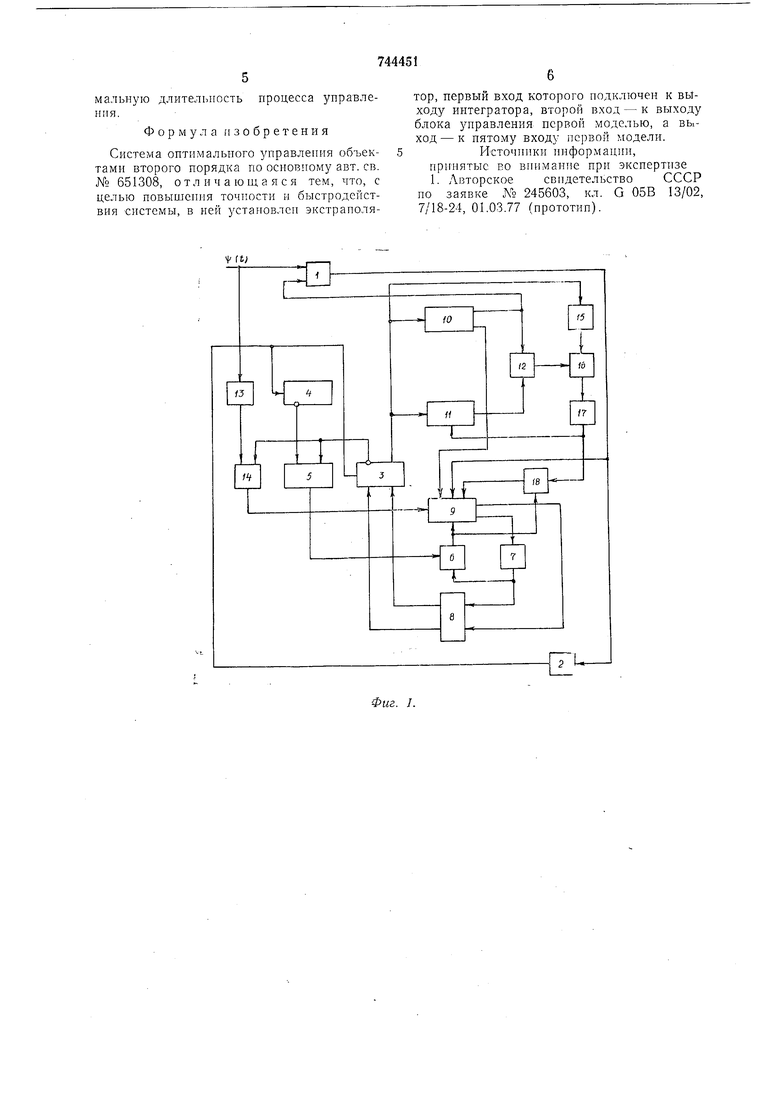
матор 12, первый функциональный нреобразователь 13, третий сумматор 14, второй функциональный нреобразователь ю, множительный блок 16, интегратор 1/, экстраполятор 18. При этом (t) -задаюн1,ее воздейетвне, Xi(t), yY2(j -фазовые координаты объекта; ), /(2 (v) - фазовые координаты нервой модели.
Задачей оитимальной по быетродействию системы унравлення объектами второго иорядка является формирование последовательноетн онтимальных управлений вида ±i/max илн +Lmax, где t/max - макенмальное значение уиравляюгцих воздействий как функции фазовых координат объекта унравлення.
При этом система реализует нелииейиый закон управления, онределенный на фазовой плоскости уравнением линии переключения. Поскольку кусочно-линейная или кусочно-нелинейная аппроксимация фупкции переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использозана модель, миогократио и в «быстром временп реалпзуюгцая ура1зненпя движения объекта. В случае, когда параметры объекта изменяются в ироцессе управлеиля, построить указапиую линию переключения невозможно и для оитпмальпого но быстродействию алгоритма управления пеобходпмо определять значення параметров объекта н характер нх изменения.
Предлагаемая еистема работает следуюш,им образом.
Изменеппе зпачеппй задаюп1,его воздействия f(t), поступающего на вход сумматора 1, НЛП изменение параметров объекта 10 приводит к появлению на его выходе отклоиення регулируемой иеременной Xi (t). По знаку Xi(t) блок начальных уетавок 2 производит выбор значення управления на начальном участке движения объекта 10, что обесиечивается начальной установкой триггера 3. При этом триггер 4 переводится в то же состояппе, что и триггер 3, а логический блок эквивалентиость 5 выдает сигнал «1 иа вход блока 6 управления первой моделью. Это вызывает, с одной стороны, перевод моделп 9 в режим периодического решения, а с другой стороны, выдачу унравлення Ai() па входы объекта 10, второй моделп 11 и фуикщюнального преобразователя 15. Выходные сигналы объекта 10 и модели И поступают на входы сумматора 12 для формирования сигнала рассогласования е{0, вызваппого изменением параметров объекта 10. Снгнал 8(0 с выхода сумматора 12 нодается на один из входов блока умиожеиия 16, на другой вход которого HOCTjnaeT выходной сигнал функционального преобразователя 15, структура которого определяется но методу вспомогательного оператора. Выходной сигнал блока умнол.ения 16, оиределяющпй скорость нзмеиения Оёреме1п1Ых иара.метров объекта 10, иосредство.м интегратора 1/ подается па входы второй модели И. Одиако для иолучеиия оптимальиого уиравлення знание значения неременного параметра в данный момент времени является недостаточным, поэтому значении несгационарных нараметров в каждый момент времени 4 (1, , я) подаются в экстраполятор 18, где на их основании вычисляются будущие для моменгов времени , которые затем нодаются на вход нервой модели 9 (т - число шагов ирогиозирования, Д/-нериод дискретизаЦ и).
При этом иа вход иервой модели с су.мматора 14 поступает сигнал управления м - Oo-j-lo, где /о определяется видом
задаюш его воздействия (l) и формируется при прохождеппи (/) через фуикциопальный нреобразователь 15 (для объектов второго норядка 11з(/) представляется любой кривой не выше второго порядка). Измепения иеременных объекта 10 Xi(tj и Х2(1) иостуиают как начальные условия в модель 9. Как только координата модели 9 A2(v), где , (. - масштаб времени, образуемая в ироцессе решения моделью 9 уравнений движения объекта 10, прииимает иулевое значение, нуль-орган 7 вырабатывает снгнал, поступаюндий па входы блока 6 управлеиия .моделью и блока В сравпеиия. При этом блок 8 сравиеиия определяет
зиак неременной Xi (v), поступаюи1.ей иа его другой вход, и возбуждает в зависимости от значения sign Aj (t) один из входов триггера 3. Поскольку до достижеиия изображаюш,ей точкой объекта 10 линии переключения знак перемепной не меняется, то начальное значение унравления Lo сохраияется неизмениы.м. В то же время сигиал, иоступаюш,ий с пуль-оргаиа 7 на блок 6 унравления моделью, вызывает изменение
режима работы модели 9, иереводя ее в режим задания нача.тьных услови , а экстраиолятор в режим приема текуш,их значений переменных параметров. После этого весь режим работы енстемы повторяется до тех
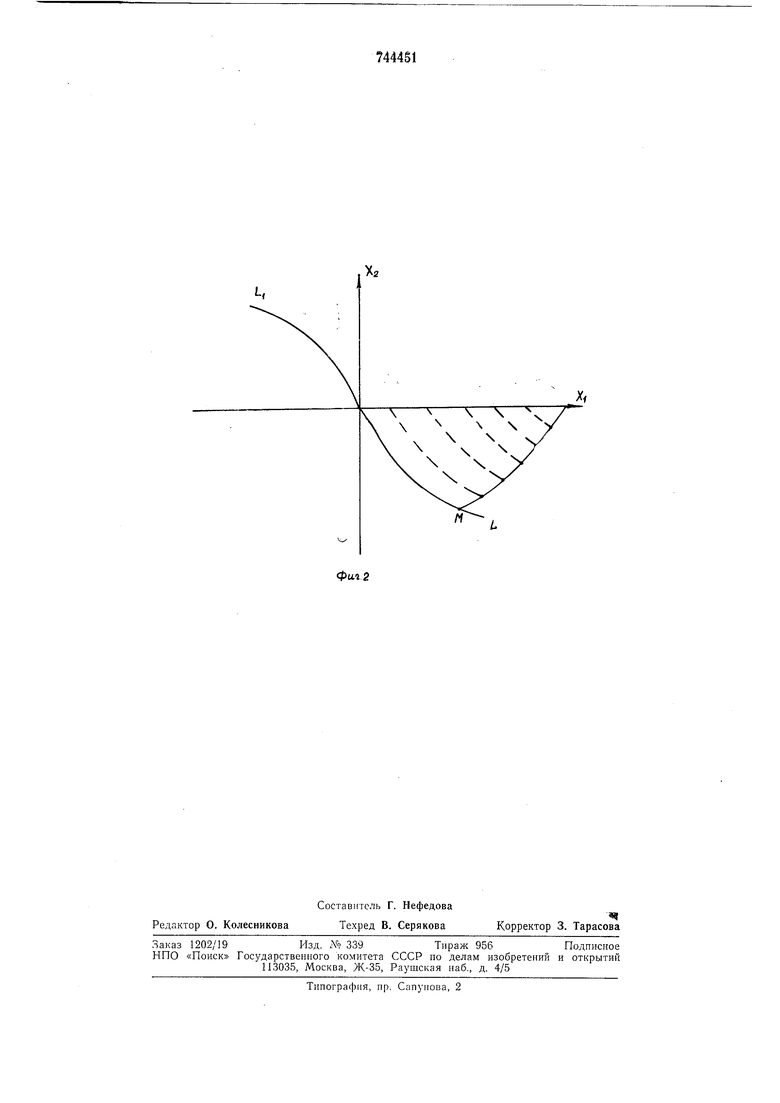
пор, пока при возбзждепии иуль-оргаиа 7 блок 8 сравнения не оиределит пзмепепия знака переменной Ai(v) при A2(v)0. Это будет свндетельетвовать о прохождении траектории отображаюн1ей точки модели 9
через начало координат системы. При этом триггер 3 изме1П1т свое состояиие, а значит и унравлеиие Uo, что оиределяет движение отображаюш,ей точки по лииии иереключеиия LO (илн LiO в зависимости от начальных условий, фиг. 2). Поскольку состояиие триггера 3 и 4 в этом случае не совпадает, то логический блок эквивалентность останавливает решеиие на моделн 9. Движение объекта 10 нрн нодобном уиравлени - нроходит по траектории, обеспечивающей минимальную длительность процесса управления.
Формула изобретения
Система оптимальпого управления объектами второго порядка по основному авт. св. № 651308, отличающаяся тем, что, с целью повышения точности и быстродействия системы, в ней устаиовлеи экстраполятор, первый вход которого подключен к выходу интегратора, второй вход - к выходу блока управления первой моделью, а выход-к пятому входу первой модели.
Источники ииформацин, принятые во внимание при экспертизе 1. Авторское свидетельство СССР но заявке Ло 245603, кл. G 05В 13/02, 7/18-24, 01.03.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| ПАРАМЕТРИЧЕСКИЙ СИНТЕЗАТОР | 1970 |
|
SU265218A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Устройство для моделирования -фазного вентильного преобразователя | 1973 |
|
SU481048A1 |
Sft;
Фиг. 1.
