1
Изобретение относится к области автоматизации производственных процессов на открытых горных разработках, а именно к устройству для автоматической стабилизации поперечного наклона роторной стрелы экскаватора.
Известно устройство для автоматической стабилизация поперечного наклона роторной стрелы экскаватора, включающее следящий привод механизма горизонтирования стрелы.
Целью изобретения является стабилизация поперечного наклона конвейера при работе экскаватора на наклонной площадке в зависимости от изменения угла поворота.
С этой целью устройство выполнено с вычислительным блоком, к входам которого подключены датчики угла поворота роторной стрелы и угла наклона рабочей площадки экскаватора, а выход соединен через чувствительный элемент с входом связанного с механизмом горизонтирования роторной стрелы узла сравнения, выход которого, в свою очередь, через промежуточный усилитель подключен к следящему приводу механизма горизонтирования роторной стрелы.
Сущность изобретения поясняется чертежами.
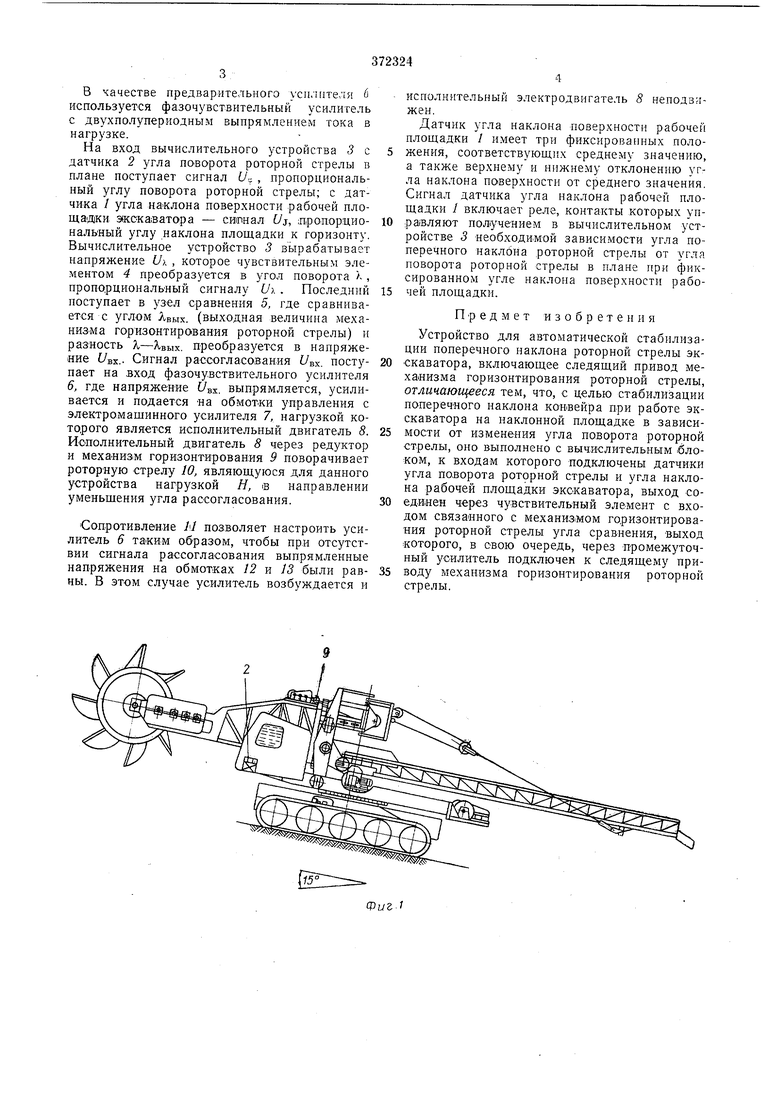
На фиг. 1 изображен роторный экскаватор с размещенными на «ем датчиками; на
фиг. 2 - принципиальная электрическая схема устройства.
Устройство автоматической стабилизации поперечного наклона роторной стрелы экскаватора состоит из датчика / угла наклона рабочей площади датчика 2 угла поворота роторной стрелы, вычислительного устройства 3, чувствительного элемента 4, узла сравнения 5, промежуточного усилителя 6, следящего привода с электромащинным усилителем 7, исполнительным электродвигателем 8, механизма горизонтирования 9 стрелы 10.
Вычислительное устройство 3 представляет собой диодный функциональный преобразователь и воспроизводит следующую зависимость:
sin sin /-sin ф,
где К - угол поперечного наклона роторной стрелы;
/ - угол наклона к горизонту поверхности рабочей площадки экскаватора;
Ф - угол поворота роторной стрелы в плане относительно иачаль юго положения.
Чувствительный элемент 4 представляет собой электромагнит поворотного действия. Узел сравнения 5 состоит из сельсин-датчика (СД) и сельсин-приемника (СП), работающих в трансформаторном режиме.
3 В качестве предварительного усилителя и используется фазочувствительный усилитель с двухполупериодным выпрямлением тока в нагрузке. На вход вычислительного устройства 3 с датчика 2 угла поворота роторной стрелы в плане поступает сигнал И- , пропорциональный углу поворота роторной стрелы; с датчика / угла наклона поверхности рабочей площадки экскаватора - сипнал Uj, пропорциональный углу наклона площадки к горизонту. Вычислительное устройство 3 вырабатывает напряжение U). , которое чувствительным элементом 4 преобразуется в угол поворота - , пропорциональный сигналу U), . Последний поступает в узел сравнения 5, где сравнивается с углом Лвых. (выходная величина механизма горизонтирования роторной стрелы) и разность К-Явых. преобразуется в напряжение t/Bx.. Сигнал расеогласО|Вания f/вх. поступает на вход фазочувствительного усилителя 6, где напряжение t/sx. выпрямляется, усиливается и подается на обмотки управления с электромашинного усилителя 7, нагрузкой которого является исполнительпый двигатель Исполнительный двигатель 8 через редуктор и механиз,м горнзонтировавия 9 поворачивает роторную стрелу 10, являющуюся для данного устройства нагрузкой Н, в направлении уменьщения угла рассогласования. Сопротивление позволяет настроить усилитель 6 таким образом, чтобы при отсутствии сигнала рассогласования выпрямленные напряжения на обмотках 12 и 13 были равны. В этом случае усилитель возбуждается и
4 8. исполнительный электродвигатель 8 неподвижен. Датчик угла наклона поверхности рабочей площадки / имеет три фиксированных положения, соответствующих среднему значению, а также верхнему и нижнему отклонению угла наклона поверхности от среднего значения. Сигнал датчика угла наклона рабочей площадки / включает реле, контакты которых уп;ра1вляют получением в вычислительном устройстве 3 необходимой зависимости угла поперечного наклона роторной стрелы от угла поворота роторной стрелы в плане при фиксированном угле наклона поверхности рабочей площадки. Предмет изобретения Устройство для автоматической стабилизации поперечного наклона роторной стрелы экскаватора, включающее следящий привод механизма горизонтирования роторной стрелы, отличающееся тем, что, с целью стабилизации поперечного наклона конвейра при работе экскаватора на наклонной площадке в зависимости от изменения угла поворота роторной стрелы, оно выполнено с вычислительным блоком, к входам которого подключены датчики угла поворота роторной стрелы и угла наклона рабочей площадки экскаватора, выход соединен через чувствительный элемент с входом связанного с механизмом горизонтирования роторной стрелы угла сравнения, -выход которого, в свою очередь, через промежуточный усилитель подключен к следящему приводу механизма горизонтирования роторной стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления поворотным механизмом роторной стрелы экскаватора | 1987 |
|
SU1470879A1 |
| ВСЕСОЮЗНАЯ IПЛТГНИ^ | 1971 |
|
SU310463A1 |
| Устройство управления электроприводом поворота стрелы роторного экскаватора | 1983 |
|
SU1165746A1 |
| Устройство управления приводами поворота консольных стрел роторных экскаваторов, перегружателей и т.п. машин | 1975 |
|
SU730938A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |

Н-„,1. 8f3---Im Фиг.2 --|l Q
