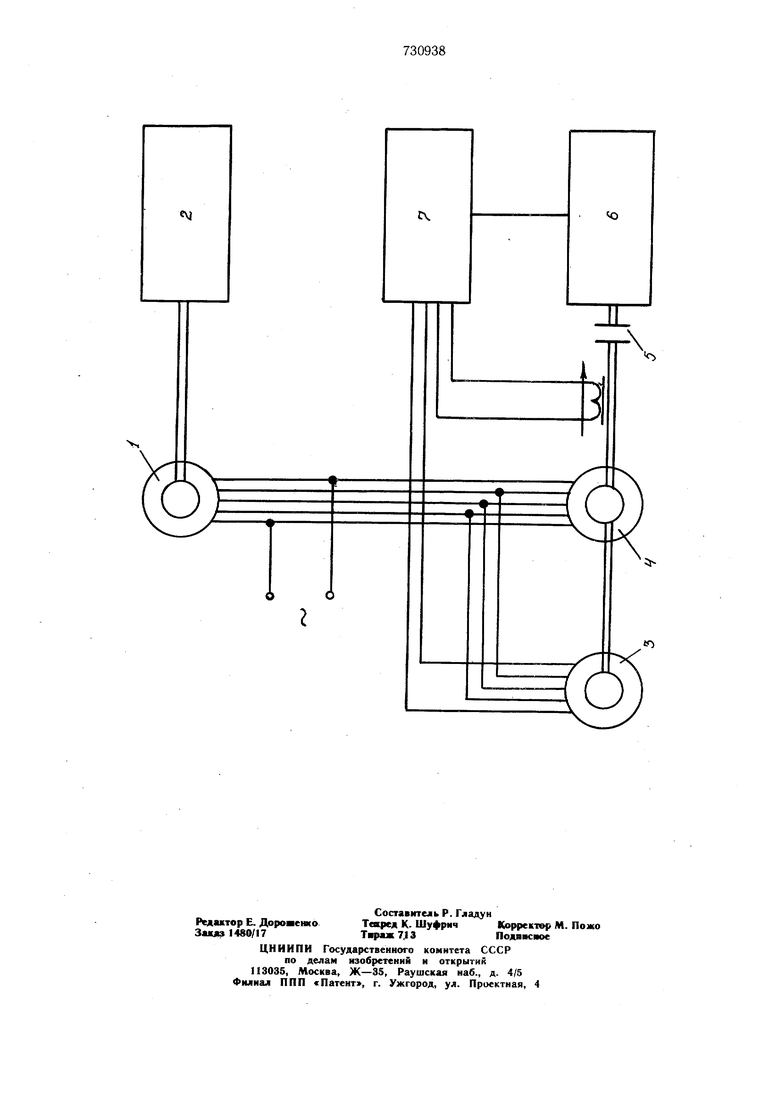
На чертеже изображена функциональная схема следящего привода поворота консольных стрел. Устройство управления приводами поворота консольных стрел с зависимым поворотом содержит сельсин-датчик 1, ротор которого жестко связан с механизмом 2 поворота ведущей стрелы, например ротор: ной стрелы экскаватора, отрабатывающий сельсин 3 и дополнительный сельсин 4, роторы которого соединены между собой и через выключаемую муфту 5 с механизмом 6 поворота зависимой стрелы, например разгрузочной стрелы экскаватора. Сельсины 1 и 3 включены по трансформаторной схеме с поворотом ротора сельсина 3 на 90°, что обеспечивает получение напряжения на статорной обмотке сельсина 3, пропорционального углу рассогласования между валами роторов сельсинов 1 и 3, а значит, и между валами обоих механизмов поворота. Дополнительный сельсин 4 включен с сельсином 1 по схеме дистанционной передачи угла и согласован с ним. Сигнал рассогласования положения стрел со статорной обмотки сельсина 3 поступает на блок 7 управления приводом поворота разгрузочной стрелы. Выходные сигналы блока действуют собственно на механизм поворота, вращая его в определенном направлении, и на выключаемую муфту 5. При работе устройства в режиме следящего привода муфта 5 включена и жестко связывает валы сельсинов 3 и 4 с механизмом поворота. В этом случае привод поворота разгрузочной стрелы работает по общеизвестной схеме позиционной следящей системы у которой задатчиком служит сельсин I, связанный с механизмом поворота роторной стрелы, а отрабатывающим устройством является сельсин 3, связанный с механизмом поворота разгрузочной стрелы. При повороте роторной стрелы на любой угол, разгрузочная стрела поворачивается на такой же угол в обратном направлении, сохраняя таким образом, неизменным Положение точки разгрузки. При необходимости осуществить поворот разгрузочной стрелы независимо от роторной например, при совмещении точки разгрузки с передвигающимся приемным устройством, управление приводом осуществляется от ручной системы регулирования. Одновременно из блока 7 управления поступает сигнал на муфту 5 и включает ее, разрывая таким образом, механическую связь между сельсинами 3 и 4, и механизмом 6 поворота. Разгрузочная стрела поворачивается на необходимый угол, а ротор вельсина 3 в это время удерживается в неподвижном (если роторная стрела в этот момент не вращается) и согласованном с сельсином 1 положении при помощи сельсина 4. Если же вращается и роторная стрела, то сельсин 4, будучи согласованным с сельсином 1, вращает ротор сельсина 3, сохраняя его согласованное положение с сельсином L При остановке привода поворота разгрузочной стрелы ручной системой муфта 5 включается, вступает в действие следящая Система привода, а разгрузочная стрела остается уже в новом, удерживаемом системой, положении. Устройство готово к дальнейшей работе в автоматическом режиме зависимой стрелы. Такое выполнение устройства позволяет при выключенной муфте производить корректировку положения сельсин-датчика и отрабатывающего сельсина, что намного упрощает процесс управления поворотами стрел, так как не требуется переналадка автоматической системы управления, и позволяет сосредоточить управление стрелами машины на общем пульте управления. Формула изобретения Устройство управления приводами поворота консольных стрел роторных экскаваторов, перегружателей и т. п. мащин, содержащее сельсин-датчик и отрабатывающий сельсин, включенные по трансформаторной схеме со сдвинутыми на 90° роторами и исполнительный привод, отличающееся тем, что, с целью упрощения управления и повышения эффективности работы, оно снабжено выключаемой муфтой и согласованным с сельсином-датчиком дополнительным устройством, ротор которого жестко соединен с ротором отрабатывающего сельсина и через выключаемую муфту с исполнительным приводом. Источники информации, принятые во внимание при экспертизе 1.Сероштан В. И. и др. Синхронная связь механизмов поворота и раздаточного транспортера роторного экскаватора. Труды ДонПИГРИ, М., «Недра, 1967, вып. 2, с. 192-198. 2.Авторское свидетельство СССР по заявке № 2098470/03, кл. Е 02 F 3/26, 1975. (прототип).
AJ
«О
Оо
I
-
О
Х- Х
i$)
