Предлагаемое устройство для установки направления движения груза предназначено для применения в электрических кранах, состоящих из трех или более мачт, к вершинам которых присоединены полиспасты, несущие общее захватное для груза приспособление (например, крюк); целью изобретения является осуществление такой механической связи между рукояткой управления и подвижными частями приборов, служащих для регулирования скорости электрических двигателей, приводящих полиспасты в действие, чтобы при установке рукоятки управления в каком-либо направлении груз автоматически перемещался также в этом направлении. Согласно изобретению, это осуществлено тем, что конец рукоятки управления (которую, по ее роли, надлежит называть рукояткой направления движения) связывается механически, например, - посредством гибких тросов, с подвижными контактами регулировочных реостатов или коммутаторов, закрепленных на каждом из полиспастов и управляющих двигателями соответствующих полиспастов таким образом, чтобы при установке рукоятки в направлении, соответствующем направлению движения груза, каждый из упомянутых реостатов или коммутаторов устанавливался в положение, соответствующее такой скорости движения полиспаста, которая равна проекции вектора скорости груза на направление соответствующего полиспаста.
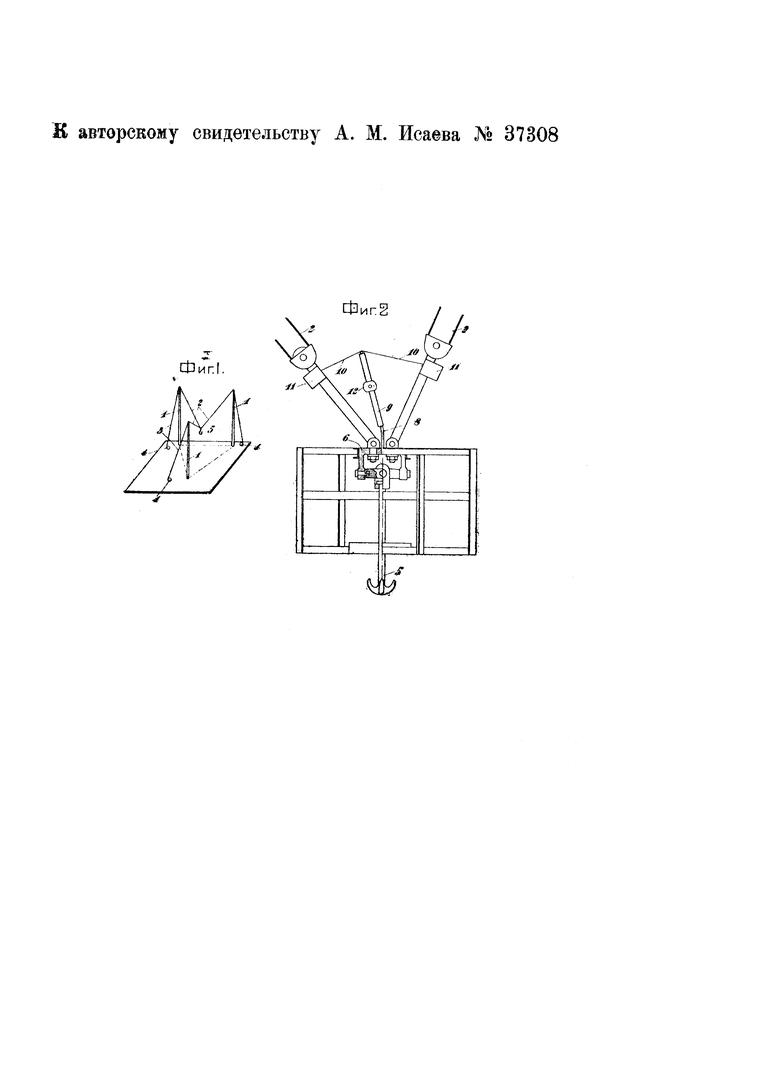
Предлагаемое устройство пояснено чертежом, на котором фиг. 1 изображает схематически вид в перспективе электрического крана, состоящего из трех мачт и трех полиспастов; фиг. 2 - в частичном вертикальном разрезе конструкцию узла соединения полиспастов, несущего рукоятку направления движения.
Электрический кран состоит из нескольких (например, из трех) неподвижных мачт 1, через вершины которых перекинуты тросы, образующие полиспасты 2. Концы полиспастов 2 соединены вместе и несут крюк 5 или иное захватное приспособление для груза. Каждый полиспаст управляется отдельной лебедкой 4, приводимой электрическим двигателем. Для того, чтобы подать крюк в желаемом направлении, необходимо лебедкам 4 сообщить разные скорости, причем соотношение этих скоростей зависит от положения крюка 5 в пространстве и меняется при его движении.
С целью достижения автоматического перемещения крюка в заданном направлении применено устройство, составляющее предмет изобретения и изображенное схематически на фиг. 2.
К скобе 6, несущей крюк 5, подвешена будка управления для машиниста. В центре скобы установлена на гибкой опоре 8 рукоятка 9 направления движения; опора 8 выполнена такой, чтобы рукоятка 9 могла занимать в пространстве любое положение. Конец рукоятки 9 связан гибкими тросами 10 с подвижными частями приборов 11, служащих для регулирования скорости электрических двигателей лебедок 4 (фиг. 1); такими приборами могут быть регулировочные реостаты или коммутаторы; трос 10, входящий в коробку прибора 11, наматывается на барабанчик, связанный с валом прибора; барабанчик находится под воздействием пружины, которая поддержавает трос 10 натянутым. При поворачивании рукоятки 9 в ту или иную сторону будет изменяться угол между рукояткою 9 и направлением каждого из полиспастов 2; тем самым будет поворачиваться подвижная часть прибора 11 и соответственным образом изменять скорость двигателя и полиспаста.
Контакты в приборе 11 располагаются таким образом, чтобы скорость полиспаста при всех положениях рукоятки 9 была равна проекции вектора скорости груза на направление этого полиспаста. При этом условии крюк 5 будет автоматически перемещаться в направлении, указанном рукояткой 9.
Такая автоматизация основана на известном правиле механики, согласно которому скорость точки в любом направлении N, составляющем некоторый угол с истинным направлением движения точки, равна проекции вектора истинной скорости υ точки на направление N, т.е. величине υ·cos(υN). Отсюда следует, что для того, чтобы крюк 5 крана двигался со скоростяю υ в каком-либо направлении, необходимо каждый полиспаст 2 сокращать или удлинять со скоростью υ·cos(υN), где N - направление полиспаста, т.е. со скоростью, равной проекции вектора скорости крюка на направление полиспаста.
В предлагаемом устройстве регулировочные приборы 11 устанавливают лишь отношение между истинной скоростью крюка 5 и скоростями полиспастов 2. Изменение же истинной скорости крюка 5 осуществляется установленным на рукоятке 9 переключателем 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кабельный подъемный кран системы Темперлея | 1931 |
|
SU27773A1 |
| Кран с поворотной консолью | 1937 |
|
SU57801A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО С РАСШИРЕННЫМ ДИАПАЗОНОМ НАГРУЗКИ | 2007 |
|
RU2460685C2 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА КРЮКА КРАНА И ГРУЗА | 1990 |
|
RU2034771C1 |
| БАШЕННЫЙ СТРЕЛОВОЙ КРАН | 2005 |
|
RU2290362C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |
| Деррик-кран | 1939 |
|
SU59523A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
| ДВУХСТРЕЛОВОЙ КРАН НА КОЛОННАХ ДЛЯ МОНТАЖА ИЗ СБОРНЫХ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ СООРУЖЕНИЙ | 1966 |
|
SU178461A1 |
Устройство для установки направления движения груза в электрических кранах, состоящих из трех или более неподвижных мачт, к вершинам которых присоединены полиспасты, приводимые электрическими двигателями и несущие общее захватное приспособление для груза (например, крюк) и будку управления, отличающееся тем, что конец расположенной в будке управления поворотной рукоятки направления движения механически связан, например, - посредством гибких тросов, с подвижными контактами регулировочных реостатов или коммутаторов, закрепленных на каждом из полиспастов и управляющих двигателями соответствующих полиспастов, таким образом, чтобы при установке рукоятки в направлении, соответствующем направлению движения груза, каждый из реостатов (или коммутаторов) устанавливался в положение, соответствующее скорости движения полиспаста, равное проекции вектора скорости груза на направление соответствующего полиспаста.
