1
Изобретение относится к области автоматического управления.
Известны следящие Системы с кОМпенсащией у1пругих деформаций и люфта, содержащие исполнительный механизм, блок компенсации и последовательно соединенные измерительный блок, усилитель и редуктор.
В известных следящих системах компенсация осуществляется путем введения местных положительных и отрицательных обратных связей, что не обеспечивает достаточной точности работы.
Предложенная следящая система отличается от известной тем, что в ней -блок компенсации содержит (последовательно соединенные измеритель разности углов поворота входного и выходного валов редуктора, усилитель, электрогпдравлический преобразователь и гидроцилиндр с поворотной лопастью, вход которого подключен к редуктору, а выход - к исполнительному механизму.
Это позволяет повысить эффективность компенсации упругих деформаций и люфта.
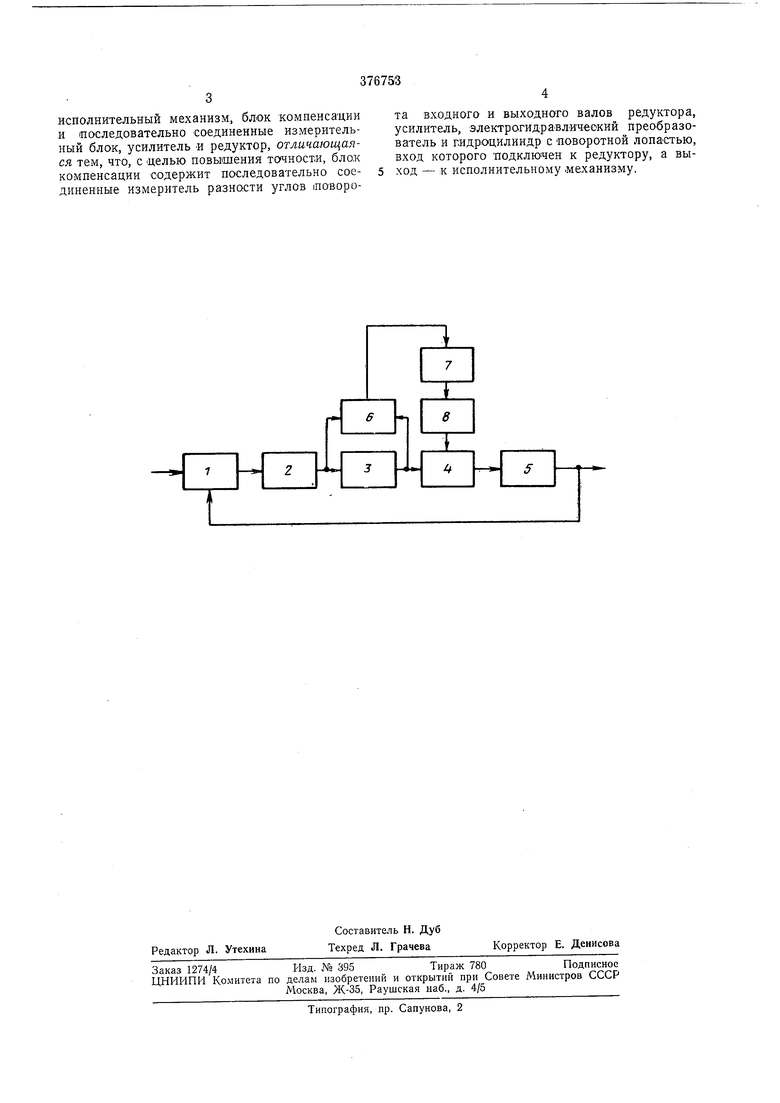
На чертеже представлена схема следящей системы.
Система содержит последовательно соединенные измерительный блок /, усилитель 2, редуктор 3, соединенный через гидрацилиндр с поворотной лопастью 4 с исполнительным механизмом 5, а также блок комлеисации, состоящий из последовательно соединенных измерителя разности углов (поворота 6 входного и выходного валов редуктора, усилителя 7, электрогидравлического преобразователя 8 и гидроцилиндра с поворотной лопастью, вход которого подключен к редуктору, а выход - к исполнительному механизму.
Р змеритель разности углов поворота входного и выходного валов редуктора вырабатывает электрический сигнал, (пропорциональный разности углов, которая возникает вследствие упругих деформаций в редукторе и люфтов. Электрический сигнал |иодается через усилитель 7 на преобразователь 8, выход которого
соединен с гидродилиндром с поворотной лопастью, который обеспечивает пропорциональное управление. Таким образом, угол поворота рабочего механизма равен сумме углов поворота выходного вала редуктора и некоторой
добавки. Параметры передачи подобраны так, что компенсирующая добавка равна по величине искажениям за счет упругих дефор.маций и люфта, пересчитанных к выходному валу редуктора.
В результате сложения искажения компенсируются.
Предмет изОб.ретения
Следящая система с компенсацией упругих деформаций и люфта в редукторе, содержащая
исполнительный механизм, блок компенсации и последовательно соединенные измерительный блок, усилитель и редуктор, отличающаяся тем, что, с целью повышения точносхи, блок компенсации содержит последовательно соединенные измеритель разности углов юоворота входного и выходного валов редуктора, усилитель, злектрогидравличеокий преобразователь и гидроцилиндр с поворотной лопастью, вход которого подключен к редуктору, а выход - к исполнительному .механизму.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1981 |
|
SU1012197A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Интегрирующий привод | 1975 |
|
SU575621A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| Двухканальная следящая система | 1974 |
|
SU503205A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |