1
Известны способы автоматического регулирования систем, содержащих -интегрирующее звено, заключающиеся в том, что определяют знаки сигналов на входе и выходе этого звена и фиксируют момент их несовпадения.
Предлагаемый способ отличается тем, что в фиксированный момент времени на выходе интегрирующего звена формируют сигнал, соответствующий установивщемуся состоянию объекта регулирования. Это позволяет улучшить переходный процесс в системе, в частности повысить быстродействие.
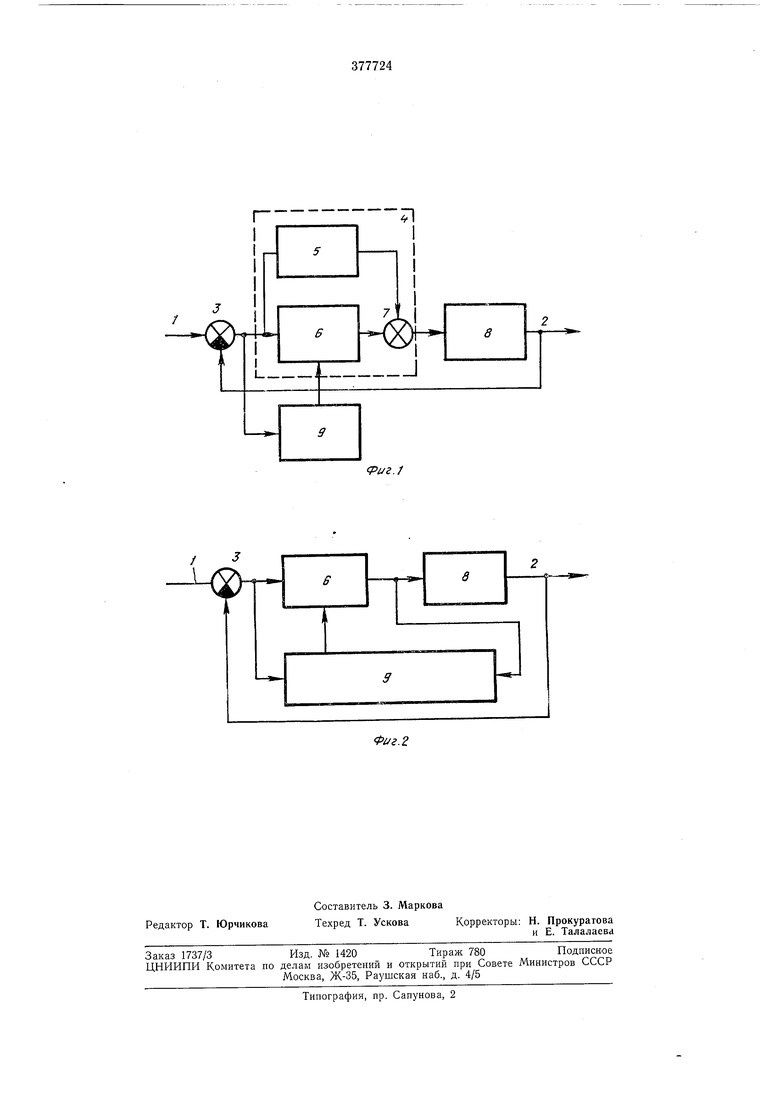
На фиг. 1 изображена блок-схема системы пропорционально-интегрального регулирования; на фиг. 2 - блок-схема астатической системы.
Система, приведенная на фиг. 1, содержит входную / и выходную 2 величины, устройство 3 сравнения, регулятор 4, пропорциональное звено 5, интегратор 6 ощибки (интегрирующее звено), сумматор 7, объект 8 регулирования и логическое устройство 9.
Входная величина сравнивается с выходной устройством 3. Разность этих величин (ошибка) подается на вход регулятора, содержащего пропорциональное звено и интегратор ощибки, выходные величины которых складываются в сумматоре и подаются на вход объекта регулирования. К интегратору подключено логическое устройство 9 сравнения знаков ошибки двух соседних периодов опроса. При несовпадении знаков логическое устройство устанавливает на выходе интегратора величину, соответствующую установивщемуся значению объекта регулирования.
Система, приведенная на фиг. 2, содержит входную / и выходную 2 величины, устройство 3 сравнения, интегратор 6 ощибки, объект 8 регулирования и логическое устройство 9, Объект 8 является интегрирующим звеном,
установившееся значение которого соответствует его входному сигналу, равному нулю. Это обстоятельство позволяет упростить алгоритм функционирования логического устройства, а именно, расключить элемент запоминания знака ошибки предыдущего момента опроса. В логическом устройстве достаточно одновременно сравнить знаки величин на входе и выходе интегратора ощибки и при несовпадении знаков сбросить интегратор в нуль.
„
Предмет изобретения
Способ автоматического регулирования систем, содержащих интегрирующее звено, заключающийся в том, что определяют знаки
сигналов на входе и выходе этого звена и фиксируют момент их несовпадения, отличающийся тем, что, с целью повышения быстродействия, 3 фиксированный момент времени иа выходе интегрирующего звена формируют сигнал, соответствующий установивщемуся состоянию объекта регулирования.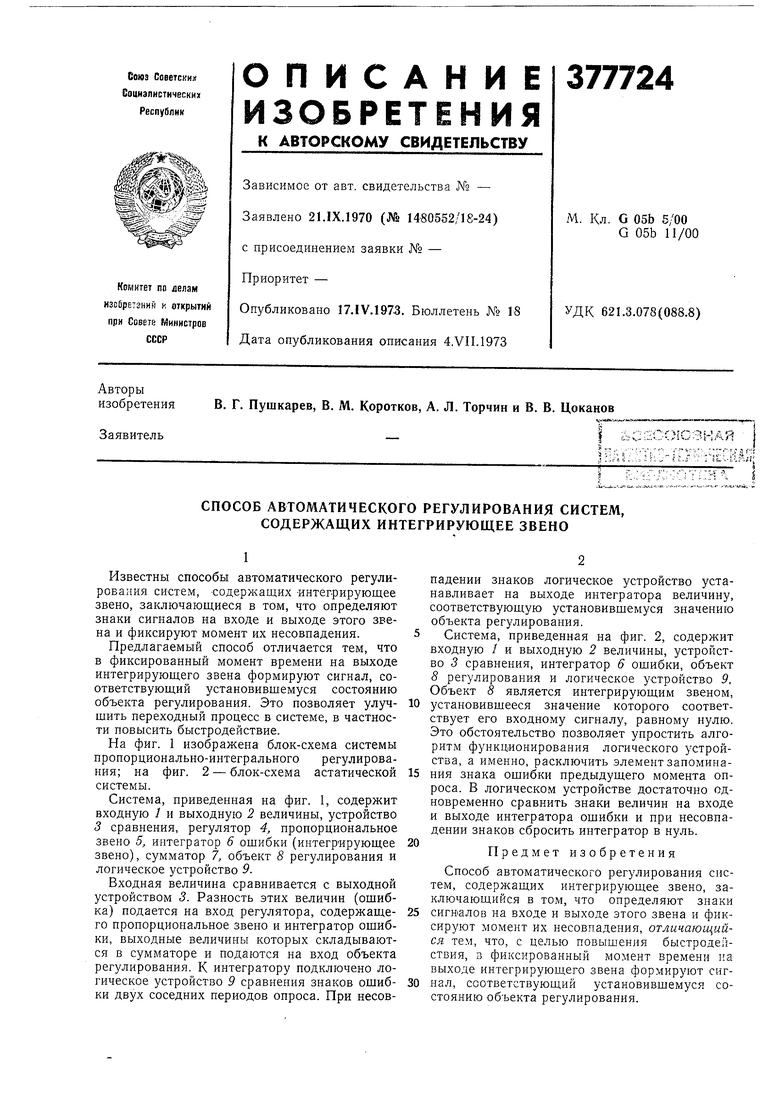
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Цифро-аналоговый регулятор для интегрирующего электропривода | 1980 |
|
SU954928A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ СТАТИЧЕСКОЙ ОШИБКИ В АВТОМАТИЧЕСКИХ СИСТЕМАХ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2505847C1 |
| Самонастраивающаяся система регулирования | 1980 |
|
SU881666A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
/ 3
-Ч2Ь1
8
