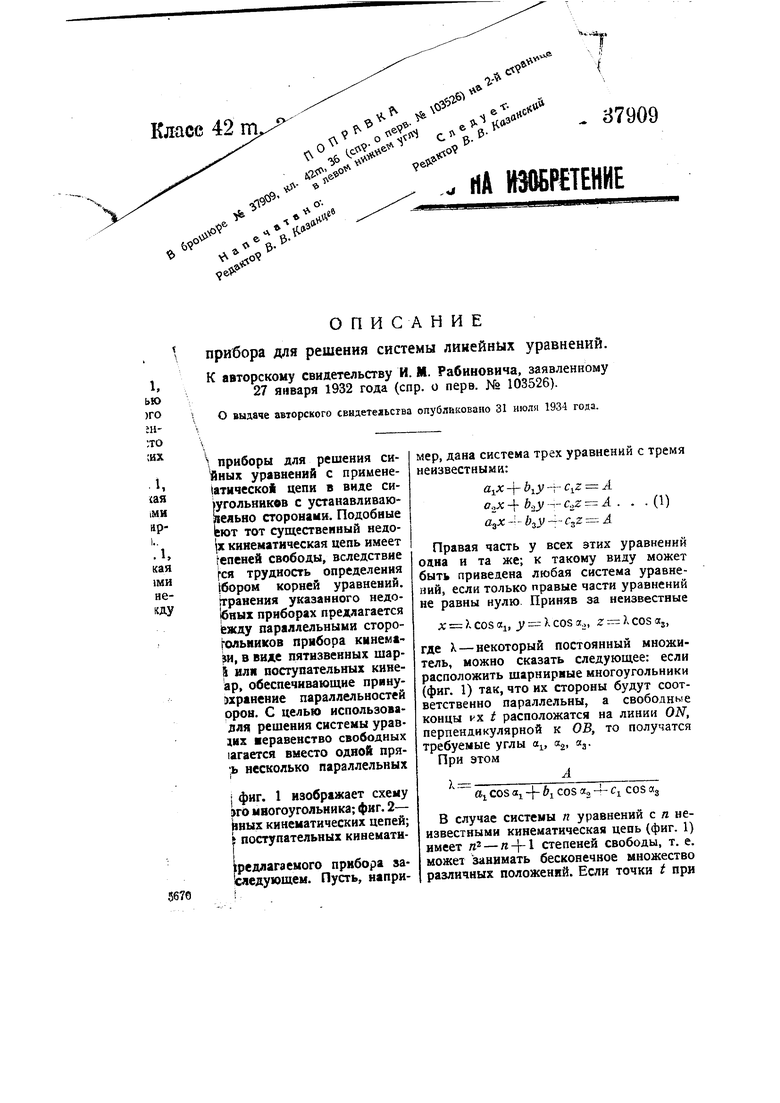
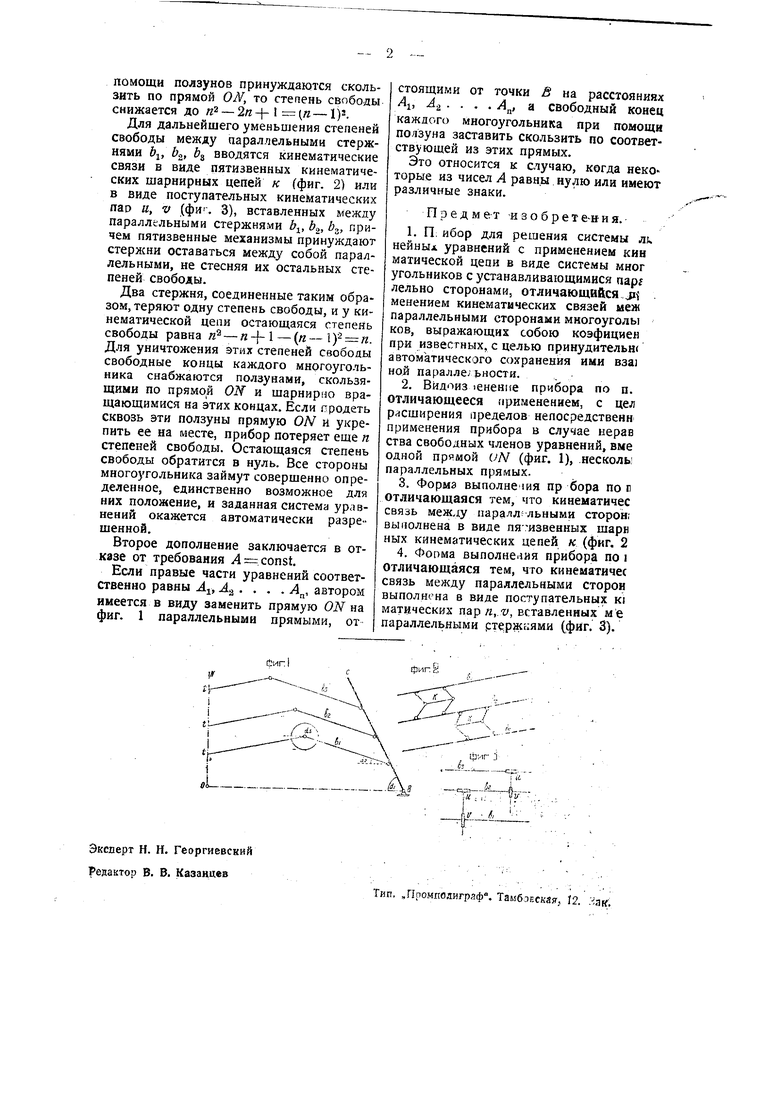
прибора для решения сис К авторскому свидетельству И 27 января 1932 года (с О выдаче авторского свндетеиьст приборы для решения ситных уравнений с применеЦтической цепи в виде си)угольникев с устанавливаюяедьяо сгороианн. Подобные Ьют тот существенный недо ж кинематическая цепь имеет гепеней свободы, вследствие гея трудность определения (бором корней уравнений. Ьгранения указанного недо|бных приборах предлагается Ьжду параллельными сторогольмиков прибора кннемж и, в виде пятизвеиных шарI или поступательиых кинеар, обеспечивающие пряну)хранение параллельностей ррон. С целью испольэовадля решения системы урав их шеравенство свободных 1агается вместо одной приь несколько параллельных : фиг. 1 изображает схему }гО мвогоугольиика; фиг. 2- |1ных кинематических цепей; поступательных кинемати редлагаемого прибора заследующем. Пусть, наприОПИСАНИЕ мы линейных уравнений. М. Рабиновича, заявленному р. о перв. № 103526). опубликовано 31 июля 1934 года. мер, дана система трех уравнении с тремя неизвестными: 4- -t- А CoX-j- b.,y C.jZ : А . . . (1) Правая часть у всех этих уравнений одна и та же; к такому виду может быть приведена любая система уравнений, если только правые части уравнений не равны нулю. Приняв за неизвестные X : X COS ot-i, у X COS а.,, г ;rr . COS «5, где X - некоторый постоянный множитель, можно сказать следующее: если расположить щарнирные многоугольники (фиг. 1) так, что их стороны будут соответственно параллельны, а свободные концы их t расположатся на линии 0, перпендикулярной к ОБ, то получатся требуемые углы а, а, «зПри этом «1 cos я -|-&1 cos а, 4-Ci cos «3 В случае системы « уравнений с л неизвестными кинематическая цепь (фиг. 1) имеет л2 - л-j-l степеней свободы, т. е. может занимать бесконечное множество различных положений. Если точки t при