1
Изобретение относится к области автоматических систем управления широкого круга объектов, для которых особо точное силовое управление положением требуется осуществлять в тяжелых динамических режимах при нагрузках значительной инерционности.
Следящие системы с переменной структурой, состоящие из измерителей рассогласования, усилителей и насосов переменного расхода «грубого и «точного каналов, исполнительных двигателей и отсчетных устройств, известны.
Недостатком известных следящих систем является значительное время согласования «точного канала при включении системы в режим слежения и при переходе объекта в другое положение с максимальной скоростью.
Описываемое устройство отличается тем, что оно содержит блок переключения структуры, причем выход принимающего измерителя рассогласования соединен с блоком переключения структуры, средние контакты двух контактных групп релейного выхода которого подключены ко входу усилителя «точного канала и сигнальной обмотке измерителя угла отсчетного устройства, нормально замкнутые контакты соединены со входом усилителя «грубого канала и с выходо.м принимающего измерителя рассогласования, а нормально разомкнутые контакты соединены между собой.
Это позволяет сократить время отработки больших рассогласований.
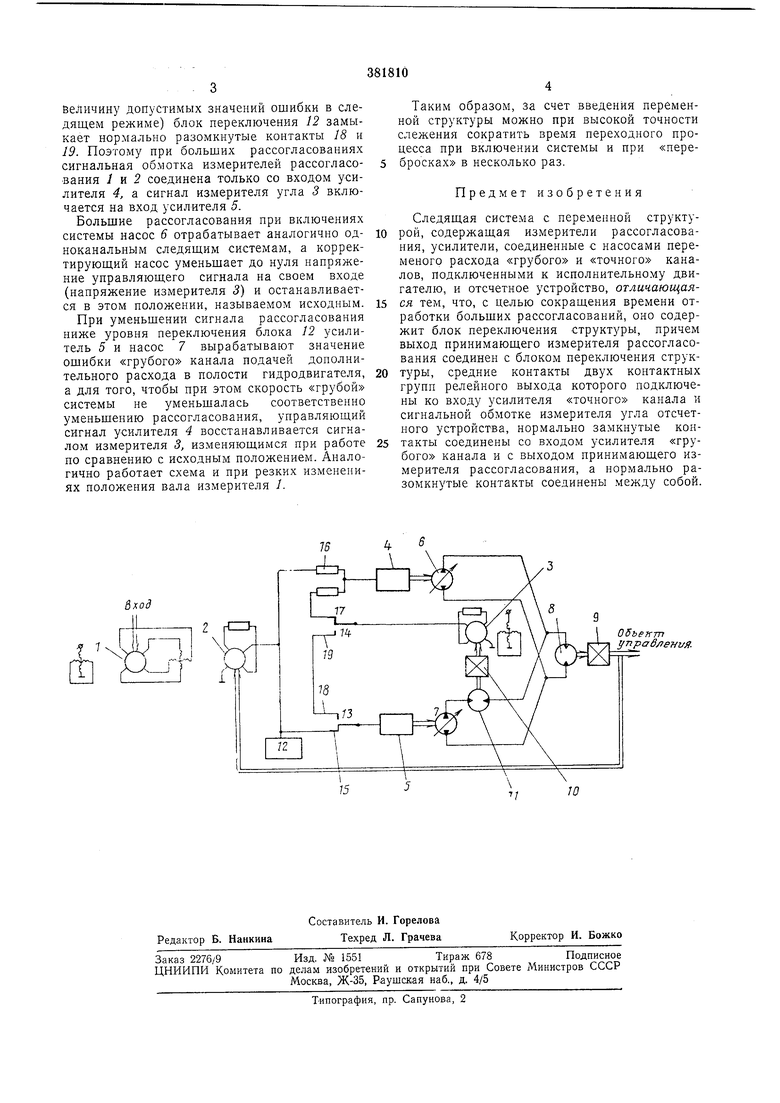
Сущность изобретения поясняется чертежом.
Следящая система с переменной структурой состоит из задающего /, принимающего 2 измерителей рассогласования и измерительного элемента 3 (измерителя угла, например, вращающихся трансфор.маторов типа ВТ-5), усилителей «грубого 4 и «точного 5 каналов, насосов 6 н 7 переменного расхода, общего для обоих каналов исполнительного гидродвигателя 8 с силовым редуктором 9, отсчетного устройства, состоящего из приборного редуктора JO, измерителя угла 3 и расходомера // (ненагруженный гидромотор), установленного последовательно с насосом 7 и блоком 12 переключения структуры с релейным выходом с двумя контактными группами, где 13-J4 - средние контакты контактных групп.
При малых рассогласованиях сигнальная обмотка измерителей рассогласования / и 2, соединенных по трансформаторной схеме, включена на вход усилителя 5 через нормально замкнутый контакт 15 и через суммирующий мостик 16 на вход усилителя 4 вместе с сигналом измерителя угла 3, подаваемым через другой нормально замкнутый контакт 17. При увеличении сигнала рассогласования до заданного уровня переключения (превышает
величину допустимых значений ошибки в следящем режиме) блок переключения 12 замыкает нормально разомкнутые контакты 18 и 19. Поэтому при больших рассогласованиях сигнальная обмотка измерителей рассогласования 1 к 2 соединена только со входом усилителя 4, а сигнал измерителя угла 3 включается на вход усилителя 5.
Большие рассогласования при включениях системы насос 6 отрабатывает аналогично одноканальным следяш,им системам, а корректируюш,ий насос уменьшает до нуля напряжение управляюш,его сигнала на своем входе (напряжение измерителя 3) и останавливается в этом положении, называемом исходным.
При уменьшении сигнала рассогласования ниже уровня переключения блока 12 усилитель 5 и насос 7 вырабатывают значение ошибки «грубого канала подачей дополнительного расхода в полости гидродвигателя, а для того, чтобы при этом скорость «грубой системы не уменьшалась соответственно уменьшению рассогласования, управляюш.ий сигнал усилителя 4 восстанавливается сигналом измерителя 3, изменяюшимся при работе по сравнению с исходным положением. Аналогично работает схема и при резких изменениях положения вала измерителя 1.
Таким образом, за счет введения переменной структуры можно при высокой точности слежения сократить время переходного процесса при включении системы и при «перебросках в несколько раз.
Предмет изобретения
Следяш,ая система с переменной структурой, содержашая измерители рассогласования, усилители, соединенные с насосами переменого расхода «грубого и «точного каналов, подключенными к исполнительному двигателю, и отсчетное устройство, отличающаяся тем, что, с целью сокращения времени отработки больших рассогласований, оно содержит блок переключения структуры, причем выход принимающего измерителя рассогласования соединен с блоком переключения структуры, средние контакты двух контактных групп релейного выхода которого подключены ко входу усилителя «точного канала и сигнальной обмотке измерителя угла отсчетного устройства, нормально замкнутые контакты соединены со входом усилителя «грубого канала и с выходом принимающего измерителя рассогласования, а нормально разомкнутые контакты соединены между собой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля погрешностей электромашинных преобразователей угла | 1988 |
|
SU1569981A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| Адаптивная система управления с переменной структурой | 1988 |
|
SU1659980A1 |
| МНОГОТОЧЕЧНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ | 1973 |
|
SU366781A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| УСТРОЙСТВО для ВЫРАБОТКИ УПРАВЛЯЮЩЕГО СИГНАЛА ДВУХОТСЧЕТНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 1973 |
|
SU382060A1 |
| Индикатор равенства напряжений | 1974 |
|
SU711483A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
Обьетгтп управ/гелиЯ.
