t
(21)4393815/24-10
(22)19.01.88
(46) 15.03.90. Бюл. № 10 (72) А.В.Малышев
(53)681.84.083.8 (088.8)
(56)Авторское свидетельство СССР N° 1068995, кл. G 11 В 21/04, 1982.
Авторское свидетельство СССР № 1167653, кл. G 11 В 21/04, 1983.
Авторское свидетельство СССР № 1446653, кл. G 11 В 21/04, 1988.
(54)УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ГОЛОВОК ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ
(57)Изобретение относится к технике хранения информации и позволяет повысить точность и быстродействие, а также упростить устройство. Вычислитель 7 эталонной функции, управляемый
по шине 8, формирует цифровой сигнал эталонного перемещения каретки 13 в пределах отрезков Я/8 Причем закон изменения указанного сигнала аналогичен закону изменения сигнала действительного перемещения, т.е. синусоидальному. После преобразования его в аналоговую форму цифроаналого- вым преобразователем 9 он поступает на аналоговый сумматор, где суммируется с аналоговым сигналом, поступающим с выхода аналогового коммутатора 3. На выходе аналогового сумматора 10 формируется окончательный сигнал регулирования, соответствующий полной разности между задаваемой и действительной координатами каретки 13. 1 з.п.ф-лы, 2 ил., 1 табл.
с
SS
(Я
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования головок записи-воспроизведения | 1987 |
|
SU1446653A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1982 |
|
SU1068995A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1983 |
|
SU1167653A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Устройство для вычисления функции линеаризации | 1980 |
|
SU905831A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1265847A2 |
| Калибратор периодических сигналов | 1989 |
|
SU1709262A1 |
| Устройство управления позиционером | 1990 |
|
SU1739386A1 |
Изобретение относится к технике хранения информации и позволяет повысить точность и быстродействие, а также упростить устройство. Вычислитель 7 эталонной функции, управляемый по шине 8, формирует цифровой сигнал эталонного перемещения каретки 13 в пределах отрезков λ/8. Причем закон изменения указанного сигнала аналогичен закону изменения сигнала действительного перемещения, т.е. синусоидальному. После преобразования его в аналоговую форму цифроаналоговым преобразователем 9 он поступает на аналоговый сумматор, где суммируется с аналоговым сигналом, поступающим с выхода аналогового коммутатора 3. На выходе аналогового сумматора 10 формируется окончательный сигнал регулирования, соответствующий полной разности между задаваемой и действительной координатами каретки 13. 1 з.п. ф-лы, 2 ил.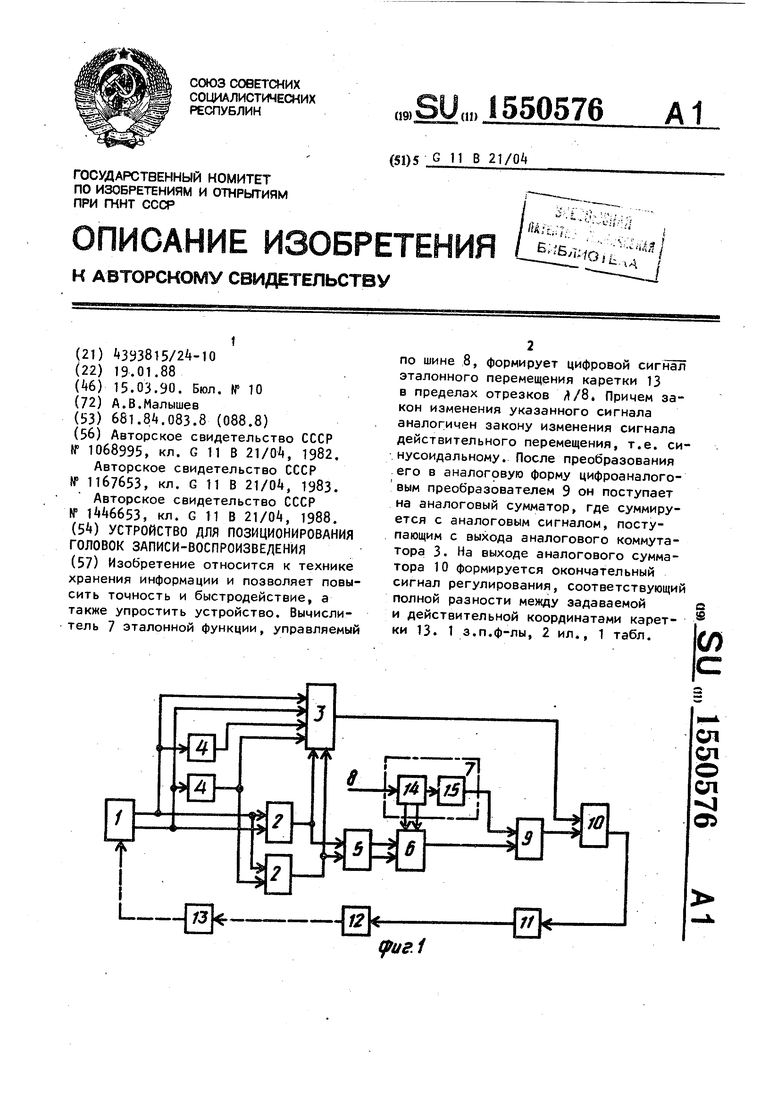
ел ел
о сп
-4J
о
pue.f
Изобретение относится к технике хранения информации и может быть использовано в оптических, магнитных или других запоминаниях устройствах с линейным перемещением головок записи-воспроизведения относительно носителя информации,
Целью изобретения является повышение точности, быстродействия и упрощение устройства.
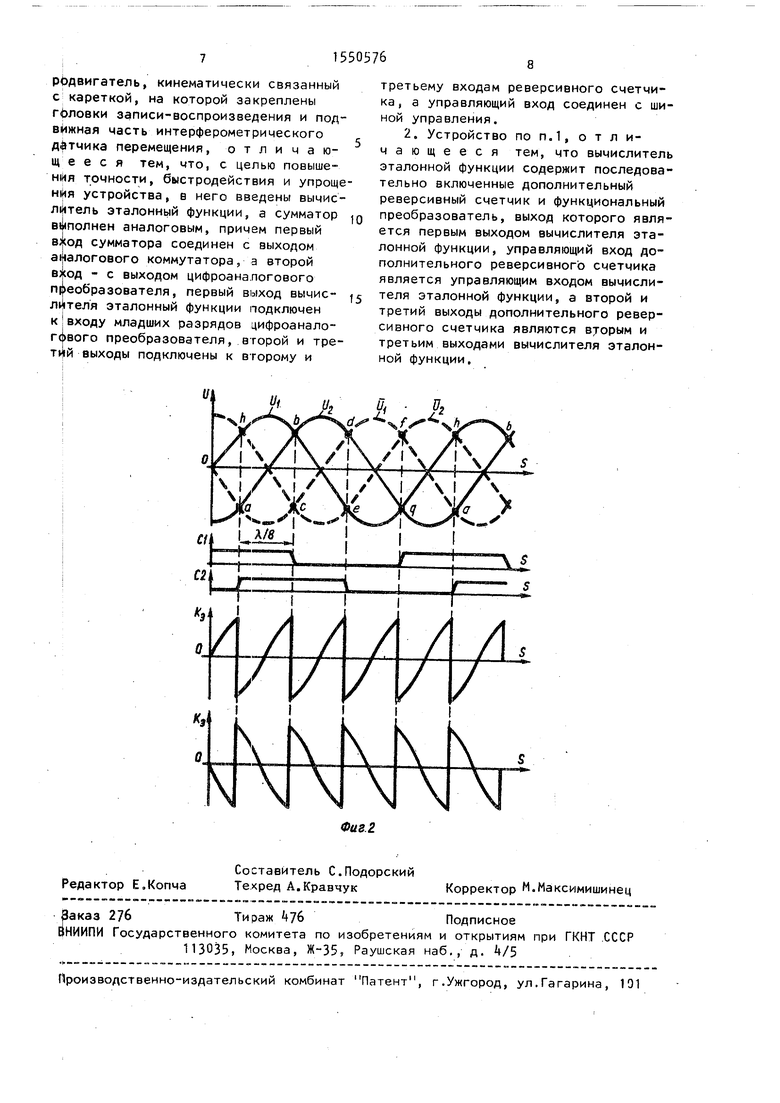
На фиг. 1 изображена структурная схема устройства; на фиг, 2 - диаграммы сигналов, поясняющие принцип работы устройства.
Устройство содержит интерферомет™ рический датчик 1 перемещения, первый выход которого соединен с первыми входами первого и второго компараторов 2, первым входом аналогового коммутатора 3, а через первый инвертор k с третьим входом аналогового коммутатора 3. Второй аыход интерфе- рометрического датчика 1 перемещения соединен с вторым входом первого компаратора 2, вторым входом аналогового коммутатора 3, а через второй инвертор 4 с вторым вхэдом второго компаратора 2 и четвертым входом аналогового коммутатора 3- Выходы первого и второго компараторов 2 подключены к входам блока 5 определения направления перемещения и управляющим входам аналоговэго коммутатоРа 3.
Устройство содержит также реверсивный счетчик 6, входа которого подключены к выходам блока 5 определения направления перемещения и выходам вычислителя 7 эталонной функции, управ ляющий вход которого соединен с шиной 8 управления. Кроме этого, устройство содержит цифроаналоговый преобразователь 8, подключенный входами старших разрядов к выходам реверсивного счетчика 6, а входами младших разрядов - к выходам вычислителя 7 эталонной функции. Выходы циtpoaнaлoгoвoгo преооразователя 9 и аналогового коммутатора 3 подключены к первому и второму входам аналогового сумматора 10 соответственно, выход которого через усилитель 11 мощности подкгш- чен к линейному электродвигателю 12, кинематически связанному с кареткой 13, на которой закреплены головки записи-воспроизведения и подвижная часть интерферометрического датчика 1 перемещения. При этом вычислитель
7 эталонной функции выполнен в виде последовательно включенных дополнительного реверсивного счетчика 1 и функционального преобразователя 15, выход которого подключен к младшим разрядам цифроаналогового преобразователя 9S управляющий вход дополнительного реверсивного счетчика 1 подключен к шине 8 управления, а второй и третий выходы - к второму и третьему входам реверсивного счетчика 6.
Устройство работает следующим образом.
При перемещении каретки |4 с выходов интерферометрического датчика 1 перемещения выдаются сдвинутые по фазе синусоидальные напряжения U и U 2 (фиг.2). После инвертирования инвесторами k формируются еще два сигнала 0 и U соответственно, показанные на тех же диаграммах штриховыми линиями. Путем сравнения по величине сигналов U, и 1Ь, а также U, и иг между собой на компараторах 2 формируются двухуровневые сигналы С1 и С2 соответственно. Причем сигнал С1 принимает высокий уровень, если U, 7 uz, a C2 - если U., U. Период следования этих сигналов равен периоду сигналов U и иг.
Блок 5 определения направления перемещения по сигналам с выходов компараторов 2 формирует на своих выходах импульсы в моменты смены уровней сигналов С1 и С2. Каждый из импульсов соответствует смещению ка- ретки 13 в том или ином направлении на величину А/В, где А - длина волны оптического излучения лазера интерферометра„
Реверсивный счетчик 6 по указанным сигналам и сигналам с выходом вычислителя 7 эталонной функции, соответствующим задаваемым перемещениям каретки, кратным А/8, формирует на выходе цифровой код, соответствующий разности между задаваемой и действительной координатами каретки с дискретностью А/8. Выходы реверсивного счетчика 6 связаны с выходами старших разрядов цифроаналогового преобразователя 9, который преобразует поступающие цифровые коды в аналоговую форму.
Аналоговый коммутатор 3, управляемый сигналами С1 и С2, производит
коммутацию поступающих на его входы сигналов Ut, U2 и U1 и U2 в соответствии с приведенной таблицей состояний.
В таблице уровни управляющих сигналов С1 и С2 обозначены следующим образом: 0 - низкий уровень; 1 - высокий.
Таким образом, в соответствии с таблицей на коммутатора 3 последовательно пропускаются крутые участки входных синусоидальных сигналов: участок ab сигнала U-i,участок cd сигнала 0,, участок ef - Ог, dh - U. и т.д. (см.диаграмму Кэ на фиг.2) В- пределах каждого отрезка А/8, сигнал Кэ на выходе аналогового комму
татора 3 изменяется не по линейному, а по синусоидальному закону.
Одновременно вычислитель 7 эталонной функции, управляемый по шине 8, формирует цифровой сигнал эталонного (задаваемого) перемещения каретки 13 в пределах отрезков А/8, причем закон изменения указанного сигнала аналогичен закону изменения сигнала действительного перемещения, т.е. синусоидальному. После преобразования его в аналоговую форму цифроана- .логовым преобразователем Э (младшими разрядами) он имеет вид, изображенный на диаграмме Кэ (см. фиг. 2).
Аналоговый сумматор 10, суммируя аналоговые сигналы с выхода аналогового коммутатора 3 и выхода цифроана лргового преобразователя 9, формируе окончательный аналоговый сигнал регулирования, соответствующий полной разности между задаваемой и действительной координатами каретки 13. Это сигнал через усилитель 11 мощности воздействует на линейный электродвигатель 13, который перемещает каретку 13 до тех пор, пока сигнал регулирования не станет равным нулю.
Вычислитель 7 эталонной функции может быть реализован различным спо
0
5
0
5
0
5
0
5
5
собом, например, с использованием цифровых автоматов, специальных управляемых генераторов функций и т.п.
Наиболее простым является техническое решение, использующее последовательно включенные дополнительный реверсивный счетчик 1 и функциональный преобразователь 15. Такой вычислитель работает следующим образом.
Дополнительный реверсивный счетчик И, управляемый по шине 8, формирует цифровой эталонный сигнал, который связан с задаваемой координатой линейно, а также сигналы счета для реверсивного счетчика 6.
Функциональный преобразователь 15 преобразует эталонный линейный сигнал в участок синусоидального сигнала подобного сигналам действительного перемещения на отрезке А/8 (см. фиг.2). Кроме этого, функциональный преобразователь 15 обеспечивает cot- ласование разрядности и весовых соотношений выходов дополнительного реверсивного счетчика 14 и входов младшей части цифроаналогового преобразователя 9.
Формула изобретения
третьему входам реверсивного счетчика, а управляющий вход соединен с шиной управления.
