С
р
СП
Изобретение относится к технике ранения информации и может быть исользовано в оптических, магнитных или иных запоминающих устройствах с инейным перемещением головок записи-воспроизведения относительно носителя информациио
. Цель изобретения - упрощение устройства при сохранении его техни- Q ческих характеристик.
На фиг.1 изображена структурная схема устройства; на фиг.2 - диаграм- мыр поясняющие принцип его работы,
Устройство содержит интерферомет- 15 рический датчик 1 перемещения первый выход которого соединен с первым вхтэдом аналогового компаратора 3, первыми входами первого и второго компараторов 2, а через первый инвертор 4 20 с третьим входом аналогового коммутатора 3, второй выход интерферометри- ческого датчика J перемещения соединен с вторым вход{ м первого компаратора 2, вторым входом аналогового 25 коммутатора 3, а через второй инвертор 4 с вторым входом второго компаратора 2 и четвертым входом аналогового коммутатора 3. Выходы первого и второго компараторов 2 подключены к 30 входам блока 5 определения направле- ния перемещения, управляющим входом аналогового коммутатора 3 и второму
и третьему входам преобразователя 6 кодов. Устройство содержит также 35 реверсивный счетчик 7, входы которого подключены к выходам блока 5 определения направления перемещения, шине 8 тгравления и выходам первого вычислителя 9, управляющий вход которо- 40 го соединен с щиной 8 управления. Кроме того, устройство содержит суммирующий блок 0, подключенный входами к выходам преобразователя 6 кодов, первого вычислителя 9 и реверсивно- дз го счетчика 7, а выходы - к последовательно соединенным цифроаналогово- му преобразователю 11, усилителю 12 мощности и линейному электродвигателю 13, кинематически связанному с реткой 4, на которой закреплены го-ловки записи-воспроизведения и подвижная часть интерферометрического датчика 1 перемещения, и цепь из последовательно включенных аналого- цифрового преобразователя 15 и второ-- го вычислителя 16, причем вход аналого-цифрового преобразователя 15 подключен к выходу аналогового коммутатора 3, а выход второго вычислителя 16 - к первому входу преобразователя 6 кодов.
Устройство работает следующим образом.
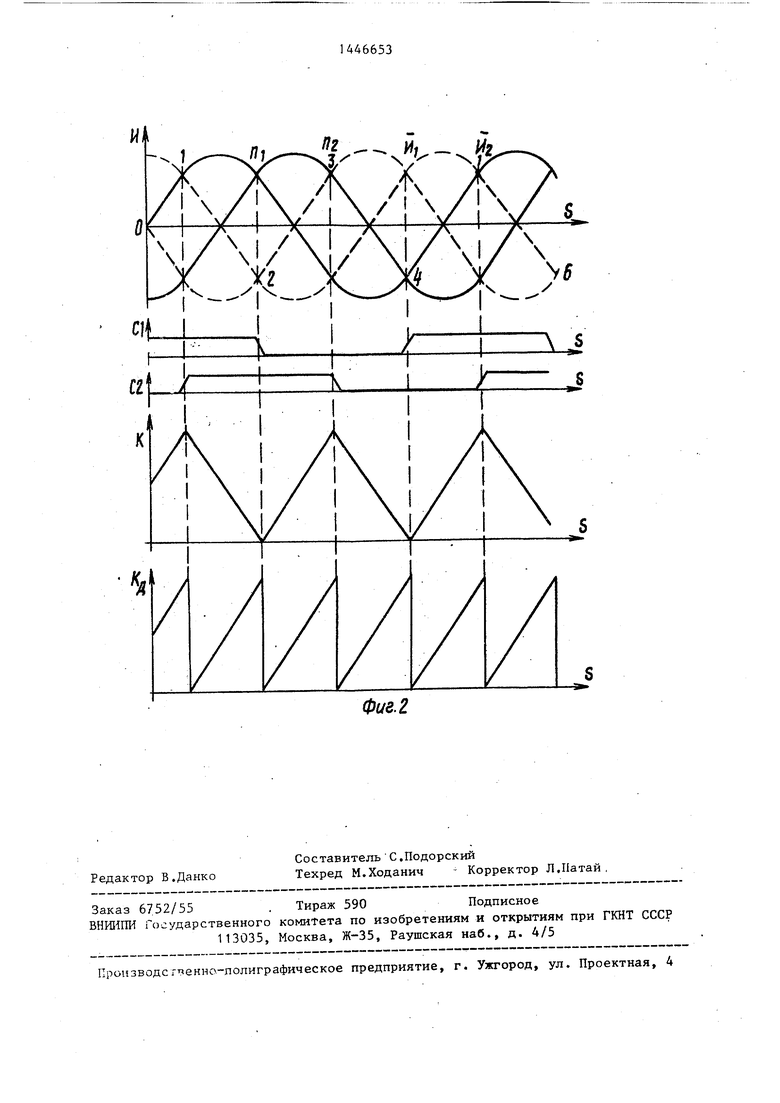
При перемещении каретки J4 с выходов интерферометрического датчика 1 перемещения вьщаются сдвинутые по фазе синусоидальные напряжения (фиг.2). После инвертирования инверторами 4 формируются еще два сигнала и и U2. Путем сравнения между собой по величине сигналов U и U, а также Uj и и на компараторах 2 формируются двухуровневые сигналы С1 иС2, Блок 5 определения направления перемещения по сигналам с выходов компараторов 2 формирует на своих выходах импульсы в моменты смены уровней сигналов С и С2. Каждый из импульсов соответствует смещению каретки 14 в том или ином направлении на величину Л/8, где /I - длина волны оптического излучения лазера интерферометра.
Реверсивный счетчик 7 по указанным сигналам и сигналам с выходов первого вычислителя 9, соответствующим задаваемым перемещением каретки, кратным А/8, формирует на выходе цифре- вой код, соответствующий разности между задаваемой и действительно координатами каретки, с дискретностью Л/8.
Аналоговый комматутор 3, управляемый сигналами С1 и С2, производит коммутацию поступающих на его входы сигналов и,,),,,и и и2 таким образом, что на выход коммутатора тельно пропускаются входных синусоидальных сигналов: участок 1-2 сигнала U, участок 2-3 .сигнала Ui, участок 3-4 сигнала U2, участок 4-1 сигнала U и т.д. (фиг.2) П олученный таким образом на выходе коммутатора 3 аналоговый сигнал преобразуется аналого-цифровым преобразователем 15 в цифровую форму и обрабатывается вторым вычислителем 16. Последний преобразует указанный сигнал, изменяющийся на каждом участке по синусоидальному закону, в сигнал К (фиг.2), связанный с теми же координатами линейно. Преобразователь 6 кода, управляемьй сигналами С и С2, пропускает на выход коды сиг нала К в прямом или инверсном виде, формируя на выходе искомую линейную функпоследова-круть е участки
цию К действительного движения каретки 14 в пределах отрезков Я/8, Одновременно первый вычислитель 9,
9,
1446653.
соединенный входом к выходу суммирующего блока, а выходом через усилитель мощности - к управляющему входу линей
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1988 |
|
SU1550576A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| Устройство для позиционирования головок записи-воспроизведения | 1983 |
|
SU1167653A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1982 |
|
SU1068995A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1265847A2 |
| Устройство управления позиционером | 1990 |
|
SU1739386A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| ЦИФРОВОЙ РЕГИСТРАТОР ПЕРЕХОДНЫХ ПРОЦЕССОВ | 1990 |
|
RU2029310C1 |

управляемый по шине 8, формирует ана-g ного двигателя, кинематически связанлогичный эталонный цифровой сигнал, который соответствует задаваемым перемещениям каретки 14 в пределах отрезков .
ного с кареткой, на которой закреплены головки записи-воспроизведения и подвижная часть интерферометричес- кого датчика перемещения, последовательно включенные аналого-цифровой преобразователь и второй вычислитель, отличающееся тем, что, с целью упрощения устройства, в него введены первый и второй компараторы и аналоговый коммутатор, причем первый вЪход интерферометрического датчика перемещения подключен к первому входу аналогового коммутатора, первым входам первого и второго компаратоСуммирующий блок 10, суммируя коды с преобразователя 6, первого вычислителя 9 и реверсивного счетчика, формирует окончательный цифровой сигнал регулирования, соответствующий 15 полной разности между задаваемой и действительной координатами каретки 14. Этот сигнал регулирования преобразуется цифроаналоговым преобразователем 11 и через усилитель 12 Mom-jQ ров и входу первого инвертора, выход ности воздействует на линейный электродвигатель 13. Последний перемещает каретку 14 до тех пор, пока сигнал регулирования не станет равным нулю.
которого соединен с третьим входом аналогового коммутатора, второй выход интерферометрического датчика перемещения подключен к второму входу аналогового коммутатора, второму входу первого компаратора и входу второго инвертора, выход которого подклочен к четвертому входу аналогового коммутатора и второму входу второго компаратора, выходы первого и второго компараторов подключены к управляющим входам аналогового коммутатора, второму и третьему входам преобразователя кодов и входам бло- ка определения направления перемещения, выход аналогового коммутатора подключен к входу аналого-цифрового преобразователя, а выход второго вычислителя - к первому входу преобраФормулаизобретения
« Устройство для позиционирования головок записи-воспроизведения, содержащее интерферометрический датчик перемещения, реверсивный счетчик, подсоединенный входами к выходам блока определения направления перемещения, к щине управления и к выходам вычислителя, соединенного управляющим входом с шиной управления, суммирующий блок, подключенный входами к выходам преобразователя кода, первого вычислителя и реверсивного счетчика,
цифроаналоговый преобразователь, под-
ного с кареткой, на которой закреплены головки записи-воспроизведения и подвижная часть интерферометричес- кого датчика перемещения, последовательно включенные аналого-цифровой преобразователь и второй вычислитель, отличающееся тем, что, с целью упрощения устройства, в него введены первый и второй компараторы и аналоговый коммутатор, причем первый вЪход интерферометрического датчика перемещения подключен к первому входу аналогового коммутатора, первым входам первого и второго компараторов и входу первого инвертора, выход
которого соединен с третьим входом аналогового коммутатора, второй выход интерферометрического датчика перемещения подключен к второму входу аналогового коммутатора, второму входу первого компаратора и входу второго инвертора, выход которого подклочен к четвертому входу аналогового коммутатора и второму входу второго компаратора, выходы первого и второго компараторов подключены к управляющим входам аналогового коммутатора, второму и третьему входам преобразователя кодов и входам бло- ка определения направления перемещения, выход аналогового коммутатора подключен к входу аналого-цифрового преобразователя, а выход второго вычислителя - к первому входу преобраФиг.2
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
