Изобретение относится к средствам автоматизации на открытых горных разработках, а именно к устройствам для контроля и учета работы экскаватора-драглайна.
Известно устройство для контроля и учета работы экскаватора-драглайна, включающее блоки измерения загрузки и разгрузки ковша, счетчик оборотов, логический блок со схемаМи «И, «ИЛИ, «НЕ, привод поворота п блок измерения угла поворота платформы.
Цель изобретення - повышение надежности устройства.
Для этого блок измерения угла поворота платформы вЫПолнен с взаимосвязанним со счетчиком оборотов редуктором с синхровным двигателем, сетевая обмотка которого подключена к источнику питания через ключ, управляющий вход которого соединен с триггером, один из входов которого, в свою очередь, через регулируемую времязадерживающую цепь и управляемую непосредственно сигналом привода поворота схему «И подключен к блоку измерения загрузки ковша, а другой вход - через регулируемую времязадерживающую цепь и схему «ИЛИ, управляемую через схему «НЕ сигн1алом привода поворота, подключен к блоку измерения разгрузки ковша.
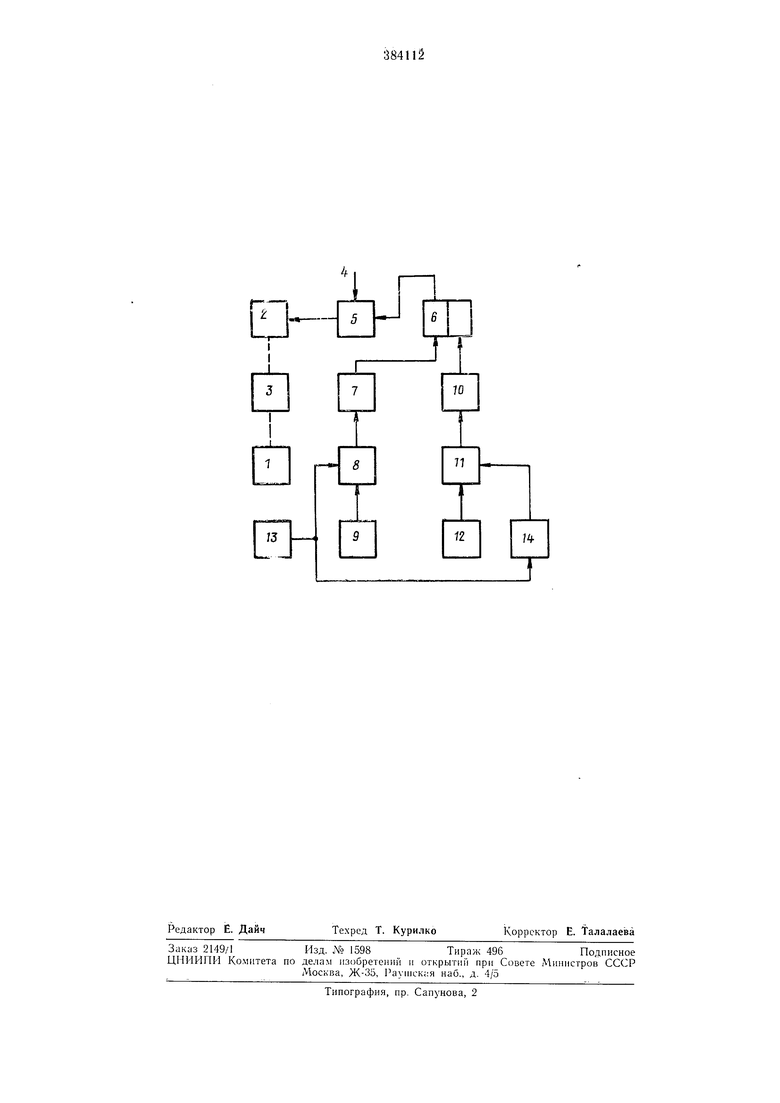
На чертеже изображена блок-схема предлагаемого устройства.„
Устройство состоит гз соедишенного со c ёTчиком 1 оборотов синхронного двигателя 2 с редуктором 3, выходной вал которого имеет число оборотов, равное числу оборотов платформы экскаватора вокруг оси, враихения при работе двигателей в установившемся режиме на естественной характеристике. Сетевая обмотка сишхроннюго двигателя 2 подключена к источнику 4 питания через ключ 5, управляющий вход которого соединен с триггером 6, один из выходов которого, в свою очередь, через регулируемую времязадерживающую цепь 7 и схем} «И 8 подключен к блоку 9 измерения загрузки ковша, а другой вход - через регулируемую времязадерживающую цепь W и схему «ИЛИ // подключен к блоку 12 измерения разгрузки ковша.
Схема «И 8 управляется с коммутирующего элемента 13 сигналом включения иривода поворота илатформы непосредственно, а схема «ИЛИ - через схему «НЕ 14.
Работает устройство следующим образом.
При сыполнен1ии операции зачерпывания блок 9 измерен1ия загрузки ковша выдает сигнал на схему «И 8. На другой вход схемы «И 8 подается сигнал с комм)тирующего элемента 13, соответствуюиип работе двигателя поворота платформы ва естественной характеристике. На выходе схемы «И 8 появляется сигнал, который подается на времязадерживающую цепь 7, на выходе которой через время / появляется сигнал, который, поступая на один из входов триггера 6, переключает его, при этом ключ 5 открывается и синхронный двигатель 2 подключается к источнику 4 питания. После выполнения операции поворота платформы экскаватора на необходимую величину производят операцию разгрузки ковша, которая фиксируется блоком 12 измерения разгрузки ковша, сигнал с выхода которого -поступает на вход схемы «ИЛИ //, а затем через времязадерживающую цепь 10 сигнал поступает на один из входов тригера 6 и переключает его, при этом ключ 5 закрывается и двигатель 2 отключается от источника питания.
В случае умышленного отключения привода поворота платформы или переключения двигателя с естественнюй характеристики на другой режим, сигнал через схему «НЕ М поступает на вход схемы «ИЛИ 11, с выхода :которой через времязадерживающую цепь на тригер 6 и переключает его в положение, при котором .ключ 5 закрыт.
Та-ким образом, после выполнения операции загрузки ковша и включения привода ПОворота платформы в указанном режиме, счетчик / оборотов через время t начинает отсчет угла поворота до момента разгрузки ковша-|время
T t+t,,
где т - выдержка времени времязадерживаюших цепей 7 и 10, определяемая тем, что о троцессе черланий, а также лр-и зачи1СТ1ке забоя, платформа экскаватора может поворачиваться на минимальный угол поворота платформы экскаватора при перемещении груженого ковша из заооя в отвал при работе экскаватора в режиме экскавации.
Вследствие чего для исключения суммирования углов при проведении вспомогательных работ с суммарным углом поворота платформы необходимо сдвинуть включение и отключение синхронного двигателя 2 во времени, определяющимся поворотом платформы на минимально возможный угол в режиме экскавации; ti - время поворота платформы экскаватора с груженым ковшом.
Предмет изобретения
Устройство для контроля и учета работы экскаватора-драглайна, включающее блоки измерения загрузки и разгрузки ковша, счетчик оборотов, логический блок со схемами «И, «ИЛИ, «НЕ, привод поворота и блок измерения угла поворота платформы экскаватора, отличающееся тем, что, с целью ловышения надежности, блок измерения угла поворота платформы экскаватора выполнен с взаимосвязанным со счетчиком оборотов редуктором с синхронным двигателем, сетевая обмотка которого подключена к источнику питания через ключ, управляющий вход которого соединен с триггером, один из входов котораго через регулируемую времязадерживаюшую цепь и управляемую непосредственно си1гщало,м .привода поворота схему «И (ПОД1кл1Ючен к блочку измерения загрузки ;ковша, а другой вход-через рагулифуемую времязадерживающую це(пь и схему «ИЛИ, управляемую через схему «НЕ си.гналом (Привода поворота, шодключен к блоку изм-ерения раЗ(Груз1КИ 1ко1ВЩэ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Устройство для контроля работы экскаватора | 1979 |
|
SU900302A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ определения положения экска-BATOPA-дРАглАйНА B пРОСТРАНСТВЕ | 1979 |
|
SU800294A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |