Изобретение относится к намерению .параметров работы экскаватора-драглайна при проведении открытых горных работ и предназначено для определения положения контрольной точки экскаватора-драглайна на вертикальной оси в трехмерной системе координат-. Известны различные способы и реализующие их устройства, которые пред назначены для измерения параметров работы экскаватора l}, . Однако, известные устройства не обеспечивают изменение положения экскаватора-драглайна в вертикгшьной плоскости. Наиболее близким к настоящему спо собу является способ определения пол жения экскаватора-драглайна, вклю.ча.ющий измерение перемещения экскава тора и угла наклона плоскости платформы экскаватора в направлении его перемещения и определения аппликаты контрольной точки экскаватора 4. При этом задают вертикальную опорную плоскость и опорную линию, определяют углы продольного и поперечного наклона экскаватора, определяют отклонение контролируемых точек от опор ной линии, определяют угол рыскания экскаватора. Однако, использование указанного способа для измерения аппликаты контролируемой точки экскаватора-драглайна сопряжено с существенными недостатками: во-первых, способ сложен, поскольку в нем предусматривается задание одной из осей (ординаты или абсциссы) оптическим лучом и вычисление отклонения контрольной точки от луча в плоскости, перпендикулярной последнему, во-вторых измерение длины перемещения и угла наклона платформы экскаватора производится непрерывно, что обуславливает накопление случайной ошибки. Действительно, в указанном способе из-за рыскания экскаватора в горизонтальной плоскости при его поступательном движении и из-за измерения в процессе перемещения экскаватора угла наклона плоскости платформы к горизонту при случайном характере проседания экскаватора, в сигналах, характеризующих величину перемещения экскаватора и угол наклона плоскости платформы, присутствует значительная по величине случайная составляющая.
Цель изобретения - упрощение и величение точности измерения контолируемого параметра-аппликаты онтрольной точки экскаватора.
Поставленная цель достигается ем, что измерение угла наклона плосости платформы производят при подятых опорах, измерение перемещения кскаватора производят ;при включеном приводе механизма шагания, а ппликата контрольной точки опредеяется при поднятых опорах на кажой точке стояния по формуле:
S i noi i , (1 ) де ho - raчaльнoe значение аппликатыtj - перемещение экскаваторана
i -том шаге ,
- угол наклона плоскости платФормы в точке стояния после завершения i-ro шага, отмеренный от горизонтальной линии против часовой стрелки,
k - порядковый номер точки стояния,
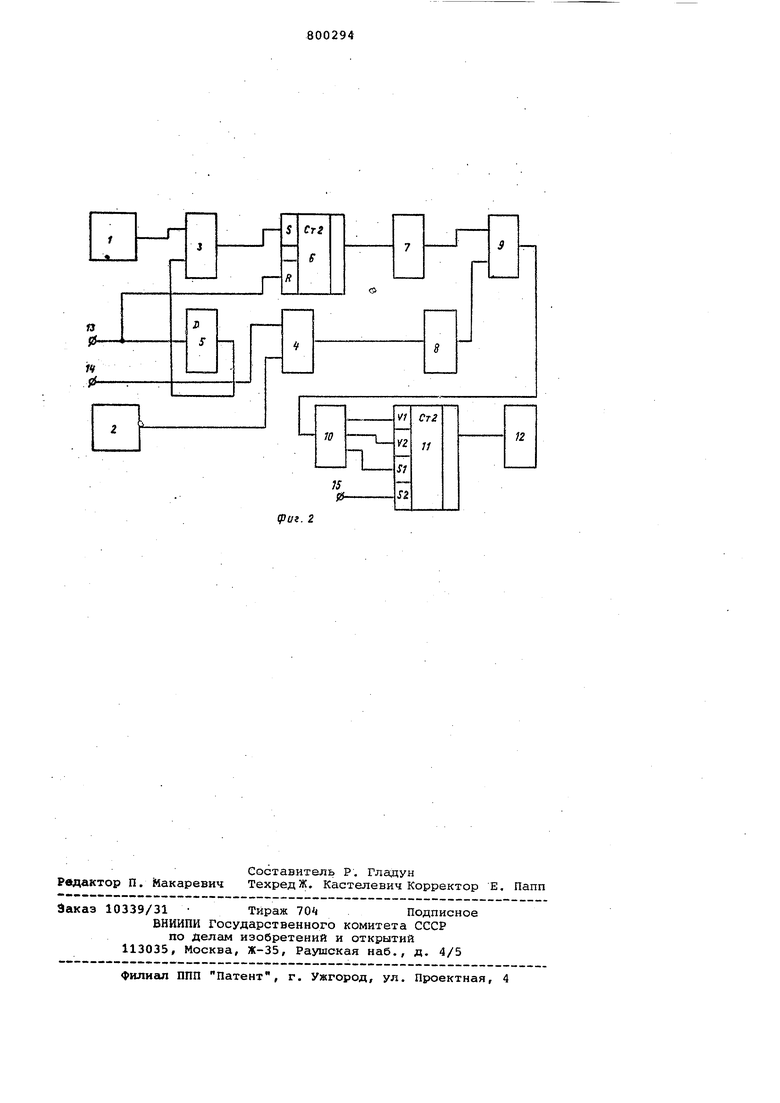
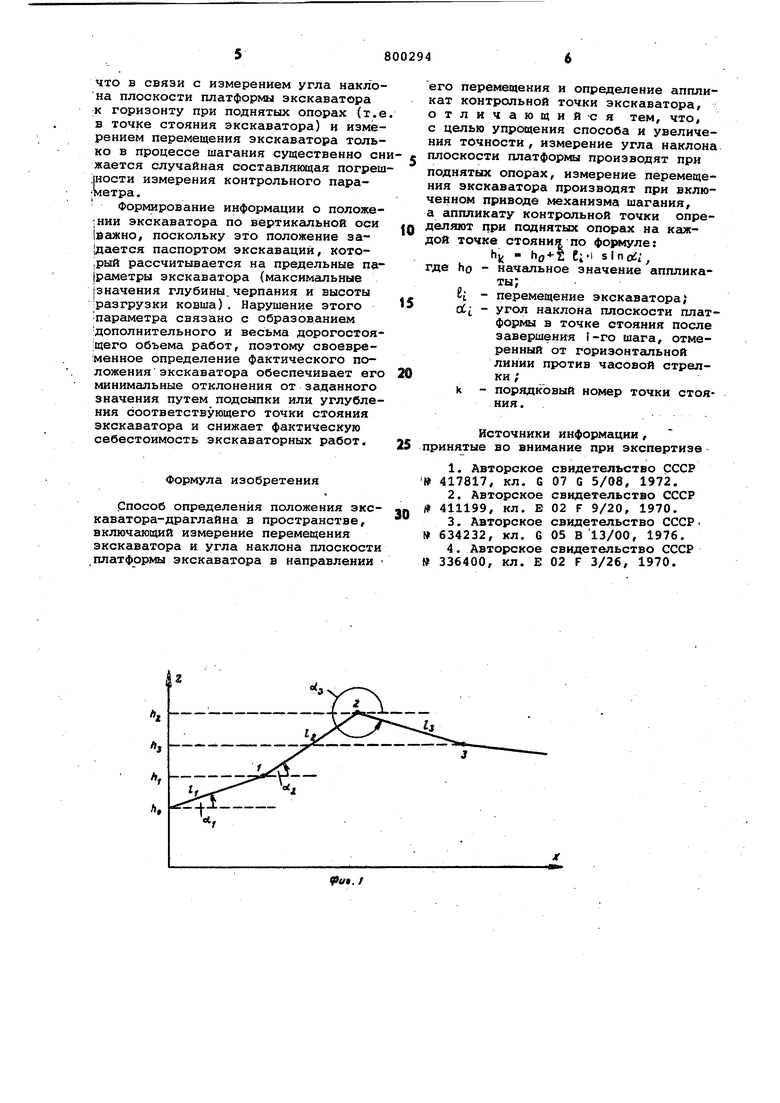
На фкг,1 приведена расчетная схема;на фиг, 2 - функциональная схема устройства, реализующего способ,
Сущность способа состоит в следующем. Пусть HQ - первоначальная аппликата контрольной точки экскаватора, h;j - hi, - аппликаты контрольной точки соответственно на первом, втором, третьем и т,п, шагах. Из фиг, 1 следует, что
h hp + Е si
hj, h + e-z. sinct,2
hj ЕЗ 5 поС}И т,д,, где В , Bi , Bj, ... - перемещения
экскаватора на 1-м, 2-м, 3-м , ,, шагах, 0 ,,,- углы наклона
платформы экскаватора в тo iках состояния
после завершения соответственно 1-го, 2-го, и т.д. шагов,
Очевидно, для k-ro шага можно записать: t..,
h| ho + i ( dСледовательно, для вычисления аппликаты контрольной точки в каждой точке стояния экскаватора необходимо располагать данными о начальной величине аппликаты ho, измерять перемещение экскаватора на каждом шаге в{ и измерять в каждой точке стояния угол наклона плоскости платформы экскаватора к горизонту в направлении перемещения d-l .
Устройство (фиг, 2) содержит импульсный датчик 1 перемещения экскаватора, датчик 2 угла наклона плоскости платформы экскаватора к горизонту, ключи 3 и 4, времязадерживающий элемент 5, счетчик 6, цифроаналоговый преобразователь 7, преобразователь & функции S i п,множительное звено 9, аналого-ци(йового преобразовтель 10, реверсивный счетчик 11, индикатор 12. По цепям 13 и 14 к устройству подключены сигналы, поступающие соответственно с замыкающих блокконтактов контактора включения привода механизма шагания и с замыкающих контактов датчика положения опор, срабатывающих при поднятом положении опоры. По цепи 15 в счетчик 11 ввод ;гся число импульсов, равное первоначальному значению аппликаты h контрольной точки экскаватора.
Способ осуществляется следующим образом.
При включении устройства в работу по цепи 15 вводится сигнал, пропорциональный начальному значению аппликаты HO, который определяют путем инструментальной съемки цлтл по данным ближайшего пикета. При перемещении экскаватора включают контактор привода шагания и по цепи 13 передним фронтом импульса счетчик приводят в нулевое состояние. С запаздыванием, определяемым элементом 5, открывается ключ 3, и с датчика 1 перемещения подают на счетчик 6 импульсы, число которых пропорциональ но фактическому перемещению экскаватора на данном шаге. После поднятия опор в положение, когда срабатывают : замыкаюаи-ie : контакты датчика положения по цепи 14 пол учают сигнал, ключ 4 открывается и аналоговый сигнал с выхода датчика 2 поступает на преобразователь 8, с выхода которого сигнал у sinct и аналоговый сигнал с выхода цйфроаналогового преобразователя 7 у„ 8 поступают на множительное звено 9, Выходной сигнал множительного звена 9 У} , преобразуют аналого-цифровым преобразователем 10 и подают на реверсивный счетчик 11, при этом при отрицательном значении у счетчик переключается в режим вычитания, при положительном - в режим сложения Выходной сигнсШ реверсивного счетчика 11, равный h hQ+ Ktsinc j индицируются индикатором 12, Аналогично работает устройство и на последующи: шагах, т,е, реализуют функцию hk Е; S i п .
Таким способом, способ реализуется аппаратурно весьма просто. При наличии на экскаваторе мини-ЭВМспооб также осуществляется просто: по программе, реализующей формулу (1) , высисляют значения искомой
,й ci; Fia каждом шаге. Следует отметить, что в связи с измерением угла наклона плоскости платформы экскаватора к горизонту при поднятых опорах (т.е в точке стояния экскаватора) и измерением перемещения экскаватора только в процессе шагания существенно сн жается случайная составляющая погреш :|ности измерения контрольного параметра. Фор№1рование информации о положе;нии экскаватора по вертикальной оси |аажно, поскольку это положение за|дается паспортом экскаваций, кото|рый рассчитывается на предельные па|раметры экскаватора (максимальные |значения глубины.черпания и высоты разгрузки ковша). Нарушение этого параметра связано с образованием дополнительного и весьма дорогостоящего объема работ, поэтому своевременное определение фактического положения экскаватора обеспечивает его минимальные отклонения от заданного значения путем подсыпки или углубления соответствующего точки стояния экскаватора и снижает фактическую себестоимость экскаваторных работ.
Формула изобретения
Рпособ определения положения экскаватора-драглайна в пространстве, включающий измерение перемещения экскаватора и угла наклона плоскости платформы экскаватора в направлении
свидетельство СССР
1.Авторское 07 G 5/08, 1972. 417817, кл. G свидетельство СССР
2.Авторское 02 F 9/20, 1970. 411199, кл. Е
0 свидетельство СССР
3.Авторское 05 В 13/00, 1976. 634232, кл. G свидетельство СССР
4.Авторское 02 F 3/26, 1970. № 336400, кл. его перемещения и определение аппликат контрольной точки экскаватора, отличающий-с я тем, что, с целью упрощения способа и увеличения точности, измерение угла наклона плоскости платформы производят при поднятых опорах, измерение перемещения экскаватора производят при включенном приводе механизма шагания, а аппликату контрольной точки определяют при поднятых опорах на каждой точке стояния по фо1 11уле; hjj - Cii sino:;, где ho - начальное значение аппликаты; . KI - перемещение экскаватора; oL - угол наклона плоскости платформы в точке стояния после завершения i-ro шага, отмеренный от горизонтальной линии против часовой стрелки/k - порядковый номер точки стояния . Источники информации, принятые во внимание при экспертизе
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |