1
Известно устройство для управлений гидравлической навесной системой трактора, содержаш,ее силовой цилиндр, подключенный к нагнетательной магистрали насоса и к сливной магистрали через золотник, связанный через рычажную систему с рычагом ручного управления и с датчиками силового и позиционного регулирования, и перепускной клапан, установленный между нагнетательной магистралью насоса и сливом и подключенный каналом управления к золотнику.
Известное устройство управления не обеспечивает автоматическое регулирование скорости коррекции положения сельскохозяйственного орудия в зависимости от величины импульсов датчиков силового и позиционного регулирования, так как количество масла, подаваемое насосом постоянной производительности в силовой цилиндр, не регулируется и всегда постоянно.
Цель изобретения - при наличии одного насоса постоянной производительности обеспечить автоматическое регулирование скорости коррекции положения орудия в зависимости от величины импульса датчиков силового или позиционного регулирования для повышения плавности хода орудий.
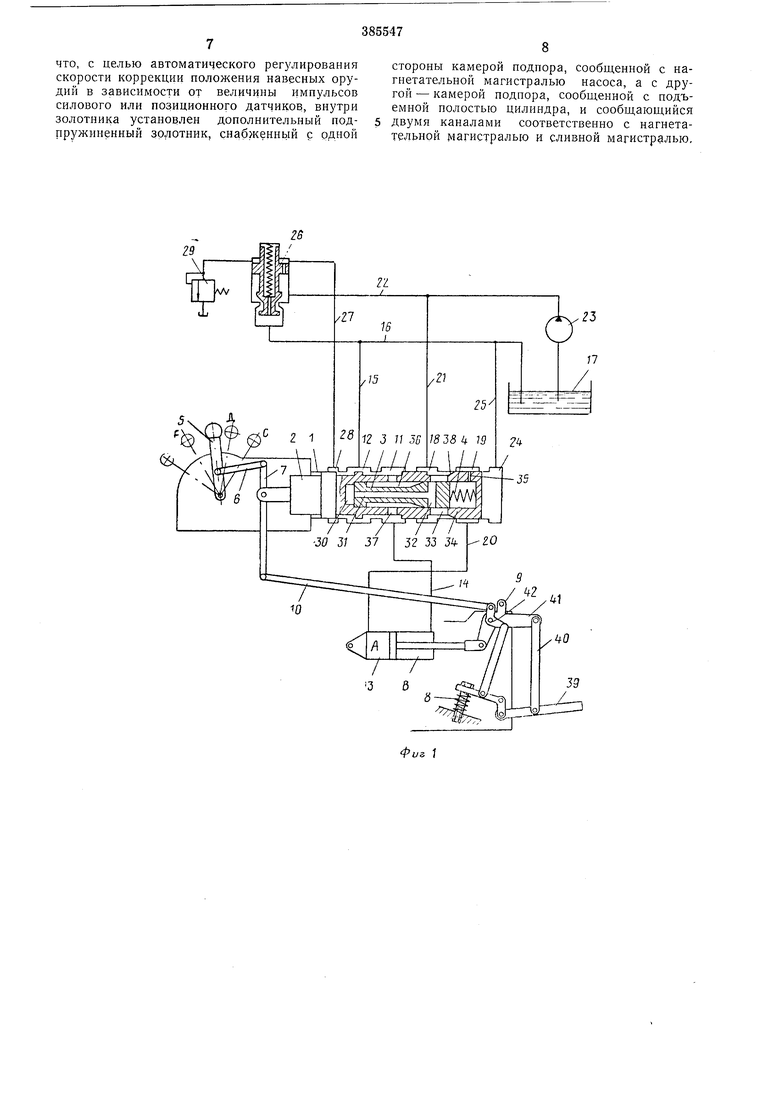
Указанная цель достигается благодаря тому, что внутри золотника установлен дополнительный подпружиненный золотник, снабженный с одной стороны камерой подпора, сообщенкой с нагнетательной магистралью насоса, а с другой - камерой подпора, сообщенной с подъемной полостью цилиндра, и соединенный разделенными между собой дросселирующей перегородкой каналами соответственно с нагнетательной магистралью и сливной магистралью. На фиг. 1 изображена схема предлагаемого
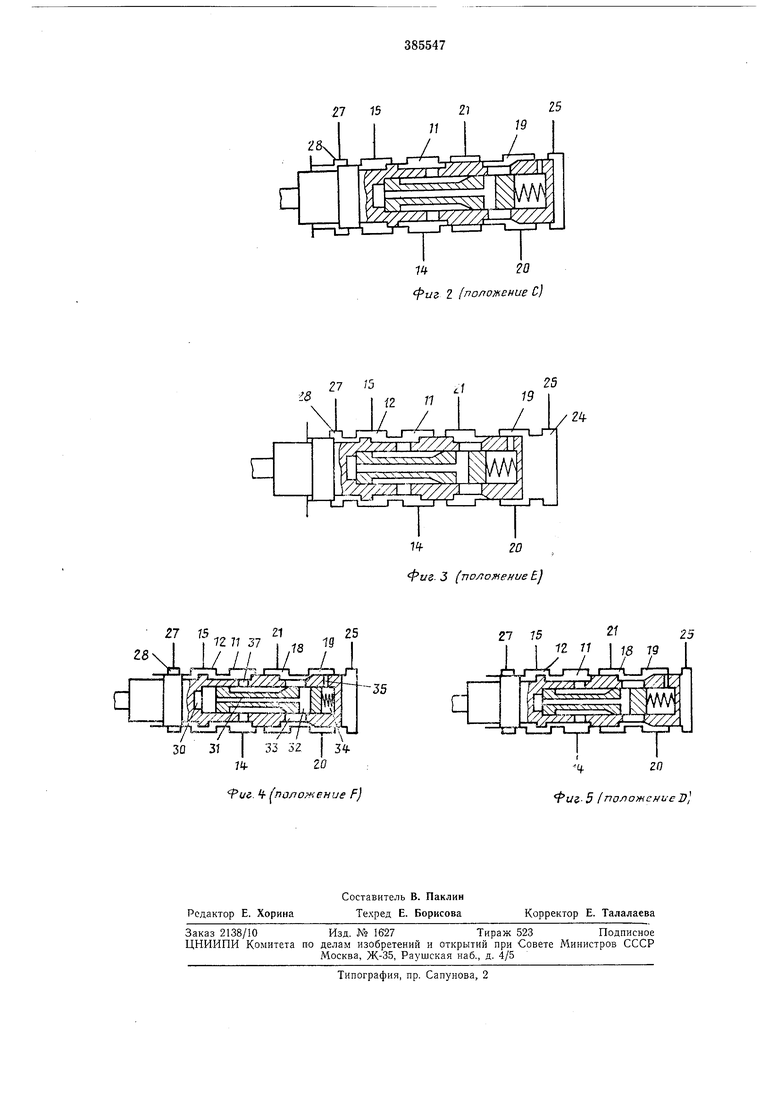
устройства при нейтральном положении золотника при установившемся режиме; па фиг. 2 показано расположение золотника, когда рычаг управления находится в положении С; на фиг. 3 -то же, в полои ении ; па
фиг. 4 - то же, в положении f; на фиг. 5 - то же, в положении D.
В корпусе / размещен золотник 2, внутри которого установлен дополнительный золотник 5, подпружиненный пружиной 4. Рычаг 5
соединен через тягу 6 и двуплечий рычаг 7
с золотником 2 и связывается с датчиками
силового 8 или позиционного 9 регулирования
через тягу 10.
Проточками П и 12 полость В опускания
силового цилиндра 13 через магистрали М, 15 и сливную магистраль 16 соединена с резервуаром 17. Проточками 19 и 18 полость А подъема силового цилиндра 13 соединена через магистрали 20 vi 21 с. нагнетательной магистралью 22 гидронасоса 23 постоянной про3изводительности, а проточками 19 и 24 через магистраль 25 со сливной магистралью 16. Гидронасос 23 нанетательиой магистралью 22 соединен с перепускным клапаном 26, канал 27 управления которого через проточки 28, 125 и магистраль /5 соединен со сливной магистралью 16. Давление в системе ограничивается предохранительным клапаном 29. Полость подпора 30 через каналы 31 и 32 в доволнительном золотнике 3 и отверстие 33 вю золотнике 2 сообщена с нагнетательной магистралью 22 насоса 23, полость подпора 34 через отверстие 35 малого диаметра соединена с подъемной полостью силового цилиндра 13. Полость 36, образуемая средней проточ-is кой на дополнительном золотнике 3, через отверстия 37 соединена со сливной магистралью 16. С целью увеличения хода золотника, с помощью которого происходит автоматическое регулирование скорости коррек-20 ции положения орудий, на наружной поверхности золотника 2 выполнен конусный поясок 38, образующий дроссельную щель переменного сечения при смещении золотника из нейтрального положения в .положение подъе-25 ма. Усилие от орудия на силовой датчик передается через продольные тяги 39, соединенные раскосами 40 с двуплечими рычагами 41, один из которых соединен со штоком силового цилиндра и вращается на поворотном30 валу 42. Для силового регулирования золотиик 2 устройства через рычаг 7, тягу 10 и систему рычагов связывается с датчиком силового регулирования 5 (как показано иа фиг. 1).35 Импульсом регулирования является деформация силоизмерительной пружины датчика. Устройство и гидросистема при силовом регулироваиии работают следующим образом. В транспортном положении орудия рукоят-40 ка управления 5 устройства и связанный с ней золотиик 2 устанавливаются в положении С (фиг. 2). При таком положении золотника проточки 11 и 19 перекрыты поясками золотника от сливных магистралей, и жидкость в45 полостях А VI В силового гидроцилиидра запирается, и орудие удерживается в транспортном положении. Канал 27 управления перепускного клапана 26 в этом положении золотника через проточку 28 соединен со ели-50 вом, перепускной клапан благодаря этому открыт и поток жидкости от гидронасоса 23 по магистрали 22 через перепускной клапан 26, сливную магистраль 16 сливается в резервуар 17, обеспечивая работу гидронасоса в55 режиме холостого хода. Для опускания орудия в рабочее положение рукоятку унравления 5 устанавливают в положение Е (фиг. 3), соответствующее заданной глубине хода рабочих органов ору-60 дия, и золотник 2 смещается влево. Полость А гидроцилиндра 13 через магистраль 20, проточки 19 и 24, магистраль 25 и полость В через магистраль 14, проточки // и 12, магистраль 15 соединяются со сливной маги-65 4 стралыо 16, и орздие опускается под действием собственного веса. При этом, так как канал управления 27 через проточки 28 и 12 соединен со сливом, перепускной клапан 26 открыт и гидрдонасос 23 работает в режиме холостого хода. При заглублении рабочих органов орудия в почву тяговое сопротивление орудия нагружает продольные тяги 39 навесного устройства трактора усилием, которое воспринимается силоизмерительной пружиной силового датчика 8. Деформация пружины передается через систему тяг на золотник 2, сдвигая его вправо. Заглубление рабочих органов в почву происходит до тех пор, пока проточка 19 не отделится золотником 2 от проточки 24, соединенной со сливной магистралью 25; таким образом перекрывается выход жидкости из полости Л (фиг. 1). При достижении золотником 2 положения, показанного на фиг. 1, рабочие органы орудия идут иа глубине, заданной положением рукоятки 5. Глубина хода рабочих органов орудия регулируется поворотом рукоятки 5 между пололсениями Д и Е. Заданная рукояткой управления устройства глубина хода рабочих органов орудия поддерживается автоматически. Если глубина хода увеличивается или умеиьщается, т. е. отклоняется от заданной, то изменяется и усилие, действующее в продольных тягах. что вызывает изменение деформации силоизмерительной пружины датчика 8, это в свою очередь вызывает смещение золотника 2 соответственно вправо или влево от положения. показанного на фиг. 1. При увеличении глубииы хода орудия золотник 2 смещается вправо и проточка 18 соединяется с ироточкой 19, а канал управления 27 перекрывается пояском золотника 2 от слива, вследствие чего перепускной клапан закрывается и поток жидкости иод давлением от насоса 23 по магистрали 22, 21, проточкам 18 и 19, магистрали 20 поступает в полость А силового цилиндра 13. В результате этого орудие выглубляется до тех пор, пока уменьшившееся усилие по продольным тягам и, следовательно, умеиьщивщаяся деформация силоизмери тельной пружины не перемещает золотник влево до тех пор, пока канал управления 27 через проточки 28 и 12 .не соединяется со сливом, что вызывает открытие перепускного клапана и работу насоса 23 в режиме холостого хода. В зависимости от величины импульса силового датчика 8 золотник 2 смещается на большую или меньшую величину от положения, показанного на фиг. 1. Чем меньше импульс от силового датчика 8, тем на меньшую величину смещается золотник 2 вправо и тем меньшая щель образуется между кромкой перемычки в корпусе устройства и конусом 38 золотника 2. Поток масла из проточки 18 через эту щель поступает в проточку 19. Вследствие дросселирования потока через щель образуется перепад давлений,
т. е. давление в проточке 19 меньше, чем в проточке 18 и, соответственно, в камере 34 подпора давление меньше, чем в камере 30 подпора, так как камера 34 через отверстие 35 соединена с проточкой 19, а камера 30 через каналы 31, 32 и отверстие 33 с проточкой /5. Вследствие разности давлений в камерах 30 и 34 дополнительный золотник 3 смещается вправо, открывая путь маслу из проточки 18 через отверстие 55 в золотнике 2, полость 36, отверстие 57, проточки // и 12 на слив (положение F, фиг. 4). Часть масла проходит через щель в проточку 19 и по магистрали 20 поступает в подъемную полость А силового цилиндра 13, производя выглубление орудия до тех пор, пока тяговое усилие в продольных тягах 39 и деформация пружины силового датчика 8 не достигают величины, заданной положением рукоятки управления 6, и золотник 2 не возвращается в положение, показанное на фиг. 1.
Таким образом, при меньщей величине импульса силового датчика золотник 2 проходит меньщий цуть от нейтрального положения в положение подъема. При этом разность давлений в полостях 30 и 34 большая, что вызывает перемещение вправо дополнительного золотника 3, при этом большая часть потока масла перепускается на слив, а меньшая - в подъемную полость А силового цилиндра 13. При большей величине импульса силового датчика золотник 2 проходит большой путь и больщее проходное сечение между проточками 18 и 19. При этом разность давлений в полостях 30 и 34 меньшая, что вызывает меньшее перемещение дополнительного золотника 3, перепускается меньшая часть потока масла на слив, а большая - в подъемную полость А силового цилиндра 13. Скорость коррекции положения сельскохозяйственного орудия определяется количеством масла, подаваемого в подъемную полость силового цилиндра.
При уменьшении глубины хода орудий уменьшается деформация силоизмерительной пружины датчика, золотник 2 смещается влево и полость А силового цилиндра 13 через проточки 19 и 24 соединяется со сливом. Вследствие этого орудие заглубляется до тех пор, пока усилие в продольных тягах 39 и усилие сжатия пружины силового датчика 5 не достигают величины, заданной рукояткой 5.
В обоих случаях поршень силового цилиндра 13 перемещается и вызывает движение орудия по высоте, направленное на исправление отклонения глубины хода орудия от заданной.
В процессе силового регулирования полость В силового цилиндра 13 через магистраль 14, проточки // и 12 соединена со сливом во всех положениях, кроме положения С фиг. 2, в результате чего силовой цилиндр 13 работает, как цилиндр одностороннего действия.
Подъем орудия в транспортное положение происходит, когда рукоятка 5 установлена в положение Д и золотник 2 в положение максимального подъема. При этом полость Л силового цилиндра 13 через магистраль 20, проточки 19 и 18, магистраль 21 соединена с нагнетательной магистралью 22 насоса 23, который работает в режиме нагрузки, так как канал управления 27 перепускного клапана 26 соединен от слива, а полость В силового цилиндра 13 через магистраль 14 проточки // и 12, магистраль 15 соединена со сливом. В результате поршень силового цилиндра
13 перемещается вправо до упора, а орудие поднимается в транспортное положение. При этом орудие поднимается быстро, так как вось поток масла от насоса 23 направляется в подъемную полость Л цилиндра 13 потому,
что щель, образуемая между кромкой перемычки в корпусе устройства и конусом 38 золотника 2 велика, не создает перепада давлений в полостях 30 и 34. В результате этого дополнительный золотник находится в крайнем левом положении и полость 18 отсоединена от сливной магистрали 16.
После окончания подъема рукоятка 5 устанавливается в положение С, в котором гидронасос 23 переключается на режим холостого
хода.
Для позиционного регулирования золотник 2 устройства через рычаг 7 и тягу 10 соединяется с датчиком 9 импульсов. Импульсом регулирования является поворот силового
вала 42. При позиционном регулировании угол поворота силового вала 42, а значит и позиция навесного орудия относительно трактора по высоте, однозначно определяется положением золотника 2, и наоборот, каждому
положению золотника 2 соответствует лишь одно положение рукоятки 5, при котором положение поршня силового цилиндра 13, а значит позиция орудия относительно трактора, фиксированы, как это показано на фиг. 1.
Таким образом, каждому положению рукоятки 5 соответствует лишь одно положение орудия по высоте, а значит и определенная глубина хода рабочих органов орудия. При позиционном регулировании рукояткой управления пользуются в той же последовательности, что и при силовом регулировании.
Предмет изобретения
Устройство для управления гидравлической навесной системой трактора, содержащее силовой цилиндр, подключенный к нагнетательной магистрали насоса и к сливной магистрали через золотник, связанный через рычажную систему с рычагом ручного управлеПИЯ и с датчиками силового и позиционного регулирования, а также перепускной клапан, установленный между нагнетательной магистралью насоса постоянной производительности и сливом и подключенный каналом управления к золотнику, отличающееся тем.
что, с целью автоматического регулирования скорости коррекции положения навесных орудий в зависимости от величины импульсов силового или позиционного датчиков, внутри золотника установлен дополнительный подпружиненный золотник, снаб кенный с одной
стороны камерой подпора, сообщенной с нагнетательной магистралью насоса, а с другой - камерой подпора, сообщенной с подъемной полостью цилиндра, и сообщающийся двумя каналами соответственно с нагнетательной магистралью и сливной магистралью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1643815A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
27 15
7420
риг Z (положение С) П 77 37 : ,, 19 J9 I ; Й--(/г. г г оло -;ение F)
фиг 3 (тюлои ение В) 27 752Г25 2 П I ;б 79 Т IfflxvTuT a SS, 1;У// -цZO ь/г- 5 1полоунен1 1 }
