1
Изобретение относится к области машиностроения, приборостроения и может быть использовано Б механизмах подач металлорежущих станков, а также в тех областях техники, где требуется получить точное дозированное перемещение подвижного органа.
Известен механизм дозированной подачи подвижного органа станка, в котором на валу закреплены маховик и храповое колесо с собачкой поворота, закрепленной на двуплечем рычаге.
Цель изобретения - устранение возможного поворота вала от действия сил инерции.
Для этого предлагаемый механизм снабжен вторым храповым колесом с подпружиненной собачкой-ограничителем поворота, взаимодействующей через двуплечий рычаг с собачкой поворота. Зубья второго храпового колеса противоположно направлены зубьям первого, а само колесо жестко закреплено на валу.
Такое выполнение механизма позволяет получить точный поворот маховика, независимый от времени действия и величины силы, прикладываемой к рукоятке поворота благодаря тому, что силы инерции замыкаются на собачку-ограничитель поворота.
Это обеспечивает получение точной дозированной цодаин.
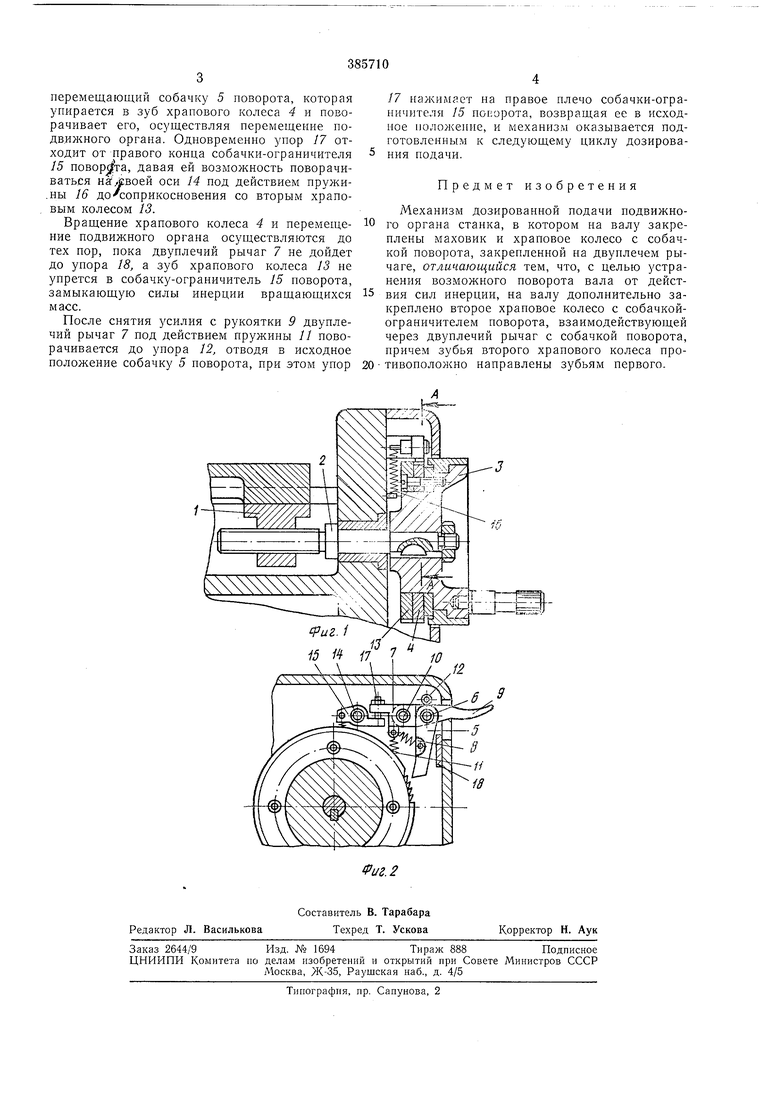
На фиг. 1 схематично изображен предлагаемый механизм, общий вид, разрез; на фиг. 2 - разрез по Л-Л на фиг. 1. .
Предлагаемый механизм содержит устройство перемещения подвижного органа /. например винт-гайку, на валу 2 которого л естко установлены маховик 3 для ручного перемещения и храповое колесо 4, повертываемое собачкой 5. Собачка 5 с помощью шарнира 6 закреплена на правом плече рычага 7 и связана с ним пружиной 8. Рычаг 7 вместе с ручкой 9 поворота установлен на оси 10 и поджат пружиной 11 к упору 12, определяющему его исходное положение. Рядом с храповым колесом 4 на валу 2 жестко установлено второе храповое колесо 13, служащее для ограничения самопроизвольного поворота вала 2, вызываемого силами инерции вращающихся масс. Зубья храпового колеса 13 противоположно направлены зубьям храпового колеса 4. На оси 14 установлена собачкаограничитель 15, предназначенная для замыкания силы инерции храпового колеса 13 и поджатая пружиной 16 к-регулируемому упору 17, установленному на левом плече рычата 7. Механизм снабжен упором 18, служащим для настройки величины дозирования подачи подвижного органа. Механизм работает следующим образом. При приложении усилия к рукоятке 9 на
оси 10 поворачивается двуплечий рычаг 7,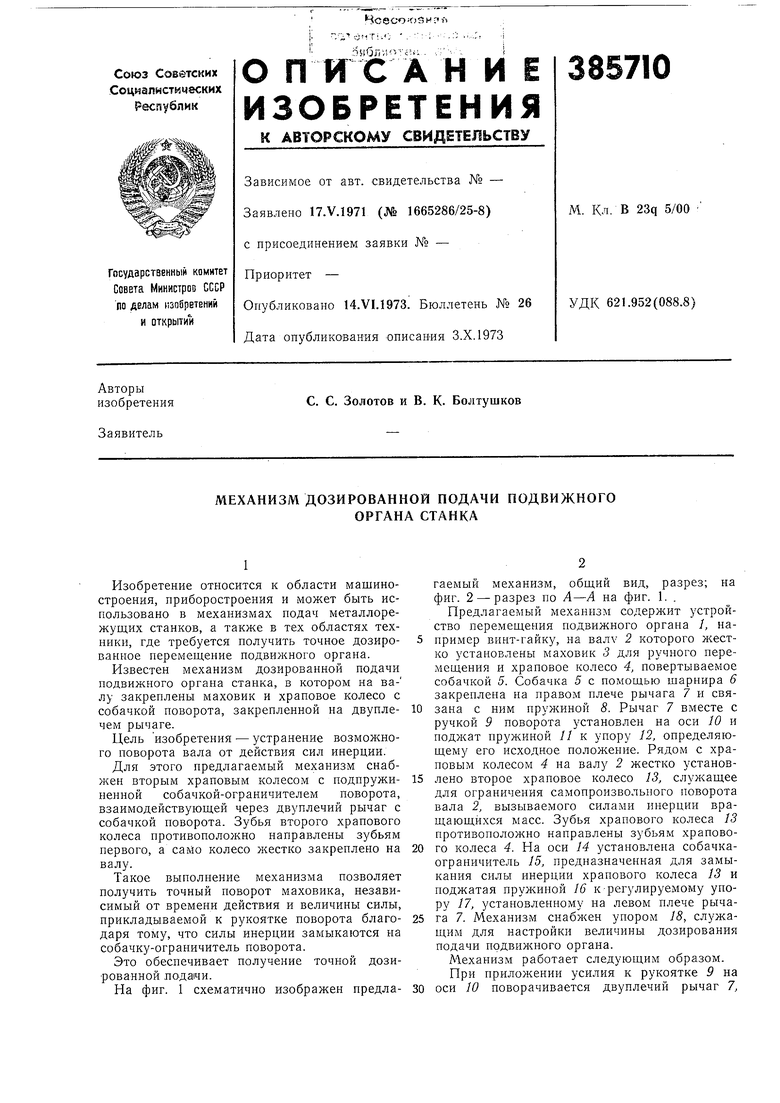
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ ПОДЪЕМА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570504C1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ДЕТАЛЕЙ | 2000 |
|
RU2212966C2 |
| Механизм привода реверсивногоТРАНСпОРТЕРА КОРМОРАздАТчиКА | 1979 |
|
SU793519A1 |
| Механизм подач | 1985 |
|
SU1292996A1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО, ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2011 |
|
RU2459605C1 |
| Исполнительный механизм эксцентрикового пресса | 1973 |
|
SU521145A1 |
| МЕХАНИЗМ ОТБОРА ЛАМЕЛЕЙ НА ПРОВОРНОМ СТАНКЕ | 1968 |
|
SU208561A1 |
| Роликовые коньки | 1980 |
|
SU1284573A1 |
