1
Изобретение относится к транспортным роторам роторных линий.
Известны транс1портн1ые роторы, содержащие -приводадой Ваш с установленным на HeiM корпусом с захватами, снабженными роликами, взаимодей|стгву1ющим« с копирами.
Описываемый транспортный ротор отличается тем, что каждый захват снабжен поводком и соединен с ним вертикальными направляющими, причем захваты с поводками установлены на каретках, закрепленных на корпусе ротора с возможностью их радиального перемещения относительно -корпуса и поворота в горизонтальной плоскости. Это обеспечивает точное совмещение и выравнивание скоростей центров захватов сопрягаемых роторов на больщем участке траектории их движения.
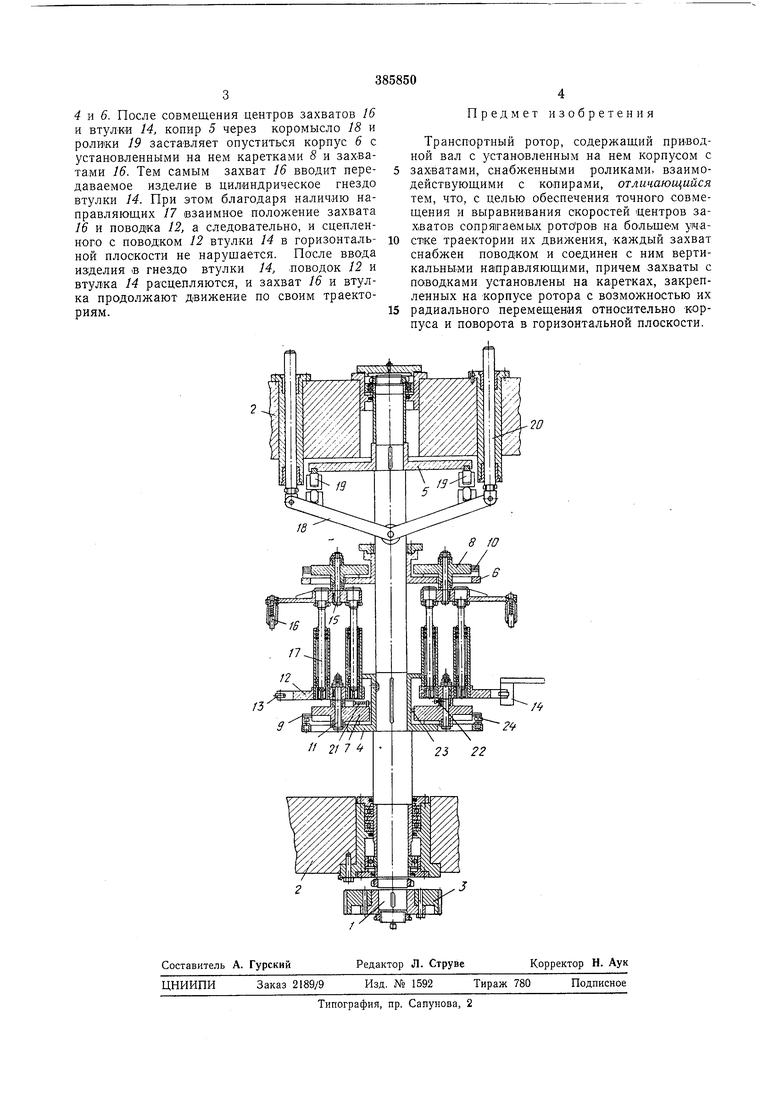
На чертеже представлен описываемый ротор.
Он содержит п.риеодяой вал /, устаиовленный на подщйяниках качения в станине 2. Шестерня 3, установленная на валу /, сообщает ему движение. Кроме того, на валу 1 жестко укреплены корпус 4 и копир 5, а также корлус 6, который может перемещаться в осевом направлении относительно вала. На корпусах 4 и 6 равномерно установлены каретки 7 и 8, которые могут радиально перемещаться относительно корпусов по направляющим 9 и 10. На каретках 7 на оси 11 установлен поводок 12 с двумя роликами 13, служащими для сцепления со втулкой М сопрягаемого ротора; поводок 12 может поворачиваться на оси // относительно каретки 7. На каретке 8 аналогично поводку 12 установлен на оси 15 захват 16. Захват 16 и поводок 12 соединены между собой вертикальными шариковыми направляющими 17. Таким образом, точки захвата 16 и поводка 12 в горизонтальной плоскости движутся по одной траектории. Копир 5 воздействует на корпус 6 посредством коромысла 18 и роликов 19. Коромысло 18 может, перемещаться в радиальном направлении посредством направляющих 20, установленных в станине 2. В исходном положении поводок 12 прижат посредством пружины 21 к упору 22, а каретка 7 - пружиной 23 к упору 24. Транспортный ротор работает следующим
образом. В момент пересечения траектории движения центров захвата 16 транспортного ротора и втулки 14 сопрягаемого рабочего ротора РОЛИ1КИ 13 захватывают втулйу 14. При дальнейщем движении роторов втулка 14 через ролики 13 и поводок 12 ведет захват 16 по своей траектории. При этом в результате радиального перемещения кареток 7 и 5 и поворота поводка 1-2 и захвата 16 соответственно на осях // и 15 центр захвата 16
получает воз мюжность двигаться со скоростью центра втулка 14 по ее траекгории независимо от скорости вращения корпусов
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗОЧНОЕ УСТРОЙСТВОйсесоюзнАЯ 1иШШ-?аШ'!ЕШ1АЯ | 1973 |
|
SU361857A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ШЛИФОВАНИЯ КУЛАЧКОВОГО ВАЛА | 2013 |
|
RU2539642C1 |
| ТРАНСПОРТНЫЙ РОТОР | 1966 |
|
SU187620A1 |
| Роторная линия | 1989 |
|
SU1710302A1 |
| Загрузочный ротор | 1990 |
|
SU1757842A1 |
| СПОСОБ КВАДРАТНОГО РАЗМЕЩЕНИЯ СЕМЯН, КЛУБНЕЙ (ГНЕЗДАМИ) ИЛИ РАССАДЫ | 1954 |
|
SU102108A1 |
| МНОГОПОТОЧНАЯ РОТОРНАЯ МАШИНА | 1967 |
|
SU205799A1 |
| Устройство для непрерывной намотки нити | 1983 |
|
SU1137046A1 |
| Устройство для резки непрерывно-движущегося проката | 1973 |
|
SU875727A1 |
| УСТРОЙСТВО ДЛЯ ЧИСТОВОЙ И УПРОЧНЯЮЩЕЙ ОБРАБОТКИ ПЛОСКИХ КОЛЬЦЕОБРАЗНЫХ ДЕТАЛЕЙ | 1973 |
|
SU368015A1 |
