1
Изобретение относится к краностроению, а именно к автоматическим противоугонным устройствам.
Известны автоматические противоугонные захваты, содержащие электропривод с центробежным механизмом, взаимодействующим с зажимными рычагами под действием распорного клина. Однако они не обеспечивают получение выдержки времени, необходимой для уменьшения инерционных сил, возникающих при срабатывании захватов.
Цель изобретения - уменьщение инерционных нагрузок на грузоподъемные краны при срабатывании противоугонного захвата.
Для этого на приводном валу центробежно-го механизма смонтирован маховик с подвижными в радиальном направлении грузами, позволяющими регулировать момент вращающихся масс.
Маховик может быть также выполнен в ниде наборных составных полуколец.
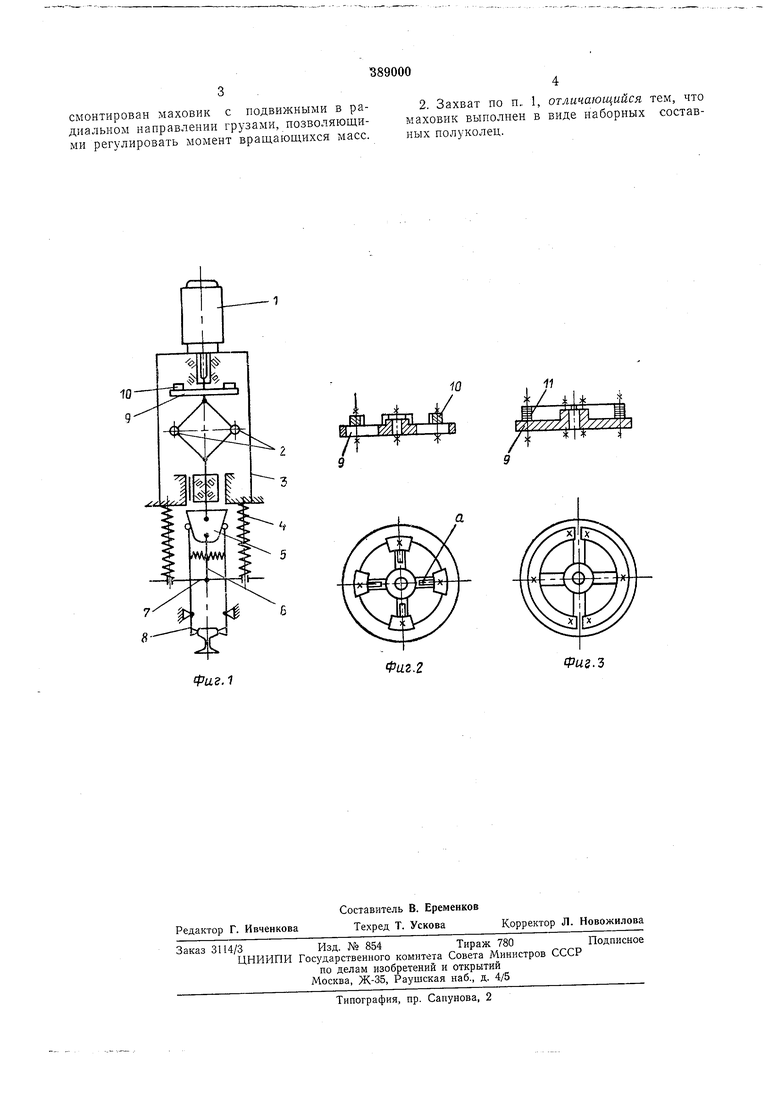
На фиг. 1 схематично изображен автоматический противоугонный захват; на фиг. 2- маховик с подвижными в радильном направления грузами; па фиг. 3 - вариант выполиснкя маховика с наборными грузами в виде полуколец.
Автоматический противоугонный захват состоит из электродвигателя /, центробежного механизма 2, корпуса 3, замыкающих пружин
4, распорного клина 5 с тягой 6, связывающей клин с траверсой 7 замыкающих пружин, клещевых рычагов 8 и маховика 9 с грузами 10.
При отключении приводпого электродвигателя центробежные грузы за счет инерции вращающихся масс привода и маховика 9 удерживают некоторое время клин 5 в верхнем положении, чем обеспечивается необходимая выдержка времени. Для регулировки махового момента маховика, в нем .предусмотрены радиальные пазы а, по которым перемещаются грузы }0. Регулировка махового момента маховика может производиться подбором определенного количества сменных полуколец 11, закрепляемых на маховике 9.
Предмет изобретения
1. Автоматический противоугонный захват для грузоподъемных кранов на рельсовом ходу, содержащий электропривод с центробежным механизмом, взаимодействующим с зажимными рычагами под действием распорного клина, отличающийся тем, что, с целью уменьщения инерционных нагрузок на грузоподъемные краны при срабатывании захвата, на приводном валу центробел ного механизма
смонтирован маховик с подвижными в радиальном направлении грузами, позволяющими регулировать момент вращающихся масс.
2. Захват по п. 1, отличающийся тем, что маховик выполнен в виде наборных составных полуколец.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1970 |
|
SU265402A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1972 |
|
SU360311A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СЛИТКОВ | 2006 |
|
RU2309889C1 |
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| Противоугонное устройство | 1949 |
|
SU90328A1 |
| Противоугонный захват для кранов | 1972 |
|
SU437702A1 |
| Противоугонное устройство | 1953 |
|
SU99942A1 |
| Автоматический клиновой противоугонный захват | 1981 |
|
SU979259A1 |
8Фиг.2
Фиг.Ъ
