1
Изобретение относится к области загрузки стеЕчЛянных пустотелых полублоков в сварочный автомат.
Известен загрузчик стеклоизделий, преимущественно полублоков, в сварочный автомат, содержап1ий приемный стол, механизмы захвата и переноса с .поворачивающимися рычагами, ограничительные уноры и пневмопривод.
Цель изобретения - повысить надежность работы.
Это достигается те.м, что мсханизм переноса вынолнеп в виде двух шарнирно связанных рычажных Параллелограммов, причем рычаг захвата снабжен компенсирующей связью, а пневмопривод - амортизатором.
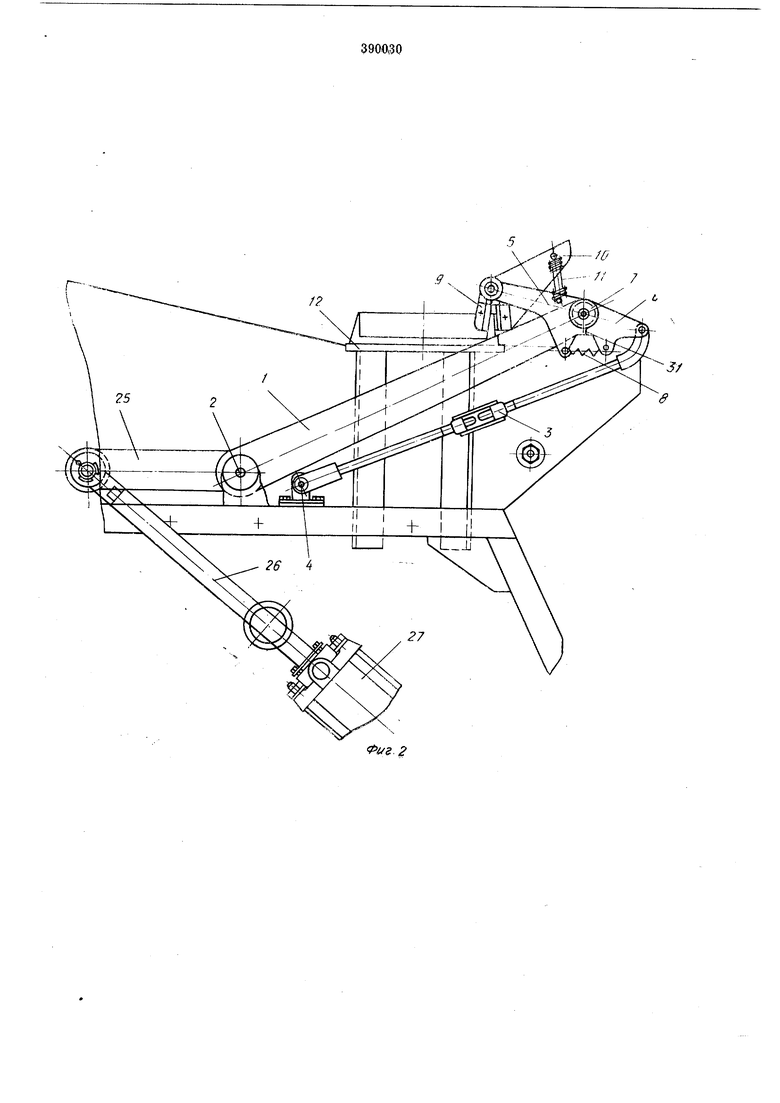
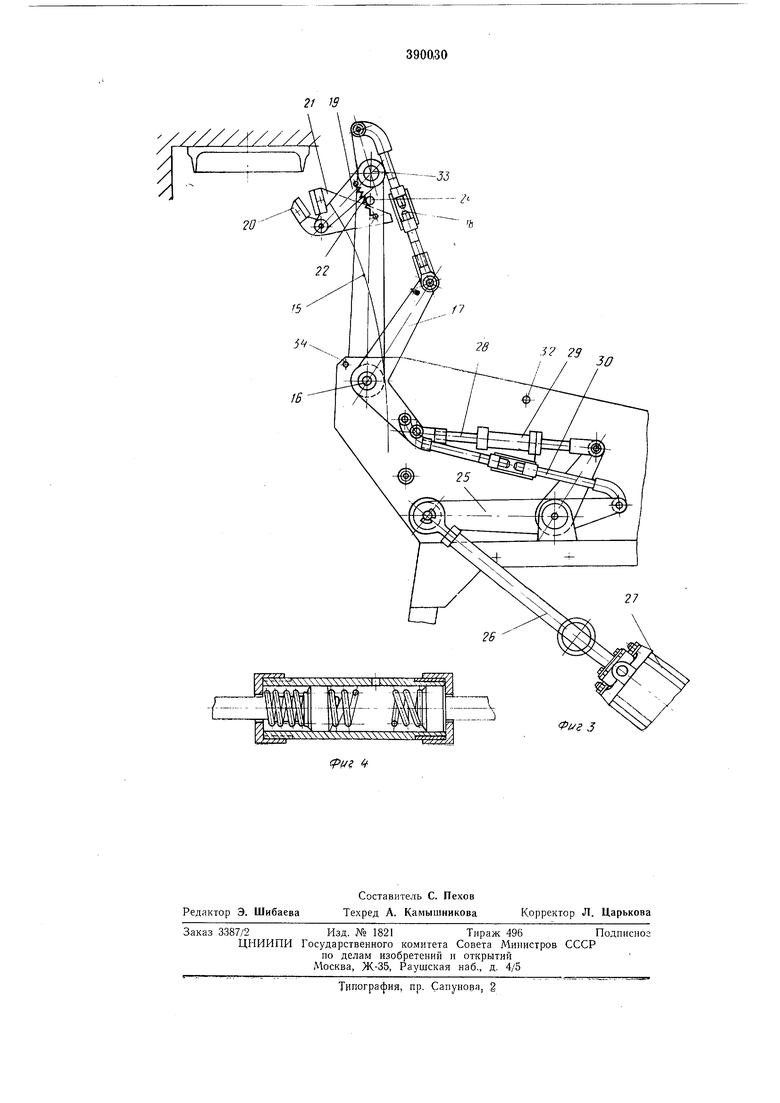
На фиг. 1 нредставлеп предлагаемый загрузчик, вид спереди; на фнг. 2 и 3 - механизмы переноса нижнего и верхнего полублоков; на фиг. 4 - элементы пневмопривода с амортизатором.
Загрузчик стеклоизделнй состоит из кривоЩйпа I, соверщающего вращательные движения Вокруг иенодвижной оси 2, кривошипа S, врао ающегося вокруг оси 4 и рычага 5 с шатуиом 6, щарнирно смоитированных на общей оси 7.
В свободном положении шатун 6 пружиной 8 прижат к рычагу 7, а вся система образует замкнутый параллелограмм, с помощью которого осуществляется загрузка HiL-Knero нолублока в сварочный автомат, причем полублок остается в горизонтальном ноложенни. Захватывается нолублок с помощью зах1вата, состоящего из неподвижной губкн 9, естко закрепленной на рычаге 5 и подвижной ry6;ui 10, закреплеппой па этом же рычаге н нрижатой к неподвижной губке пружиной //.
При захвате нолублока с нрнемного стола 12 нодвнжная губка отк)ывается унором li, а после загрузки в сварочный автомат - уиором 14. Верхний полублок переноси rcsi коромысло-шатунным .механизмом, содер 1-;ащнм стойку 15, которая вращается вокруг неподвижной оси 76 нрн нереносе нолублока от приемиого стола 12 к верхнему держателю сварочного автомата. Для нереворота нолублока на 180° служит параллелогра.мм, состоящий из коромЫСла 17, шатуиа 8 и кривошииа 19, на Конце которого закренлены губки неиодвижная 20 н иодвижная 21, прнясимаемая к неподвижной пружнной 22.
Для открывания нодвижной губки нрн захвате полублока со стола 12 служит унор 23, а для ее открывания после загрузки в снарочный автомат - унор 24, закреиленный на стойке 15. Стойка 15 связана с рычагом 25, а также со штоком 26 пневмопривода 27 с помощью рычага 28 с регулирующим элементом 29, коромысла 17 и рычага 30. Загрузчик стеклоизделий работает следую щим образом. .. /. , В исходном положении шток 26 пневмопривода 27 находится в среднем иоложении. По окончании установки иолублока шток 26 пневмопривода 27 идет вниз, и кривошипы / и 3 вращаются вокруг осей 2 и 4 в обратном направлении (по часовой стрелке). Когда шатун 6 совершает движеиие вместе с кри-вошипами / и 3, кулачок 31 рычага 5 удерживается упором 14. Благодаря этому рычаг 5 поворачивается вокруг оси 7, пружина //, соединяюпдая шатун 6 с хвостовиком губки 10, стягивает их, и захват раскрывается, освобождая полублок, после чего кулачо-к 31 рычага 5 выходит из зацепления с унором 14, и захват закрывается. При дальнейшем движении крИ|ВОшииов / и 5 по часовой стрелке, -при подходе к приемному столу 12 хвостовик подвижной губки 10 иаходит на упор 13, захват еиовь раскрывается. Одновременно с движением против часовой стрелки нижнего полублока осуществляется холостой ход губок 20, 21 переноса верхиего иолублока. Через систему рычагов 25 и 28 при движении штока 26 вниз стойка 15 совершает поворот но часовой стрелке вокруг неподвижной оси 16 и находит на упор 32. БлагОлДаря наличию в рычаге 28 регулирующего элемента 29, в то время, когда стойка 15 находит на упор 31 и останавливается, шток 26 продолжает двигаться вниз и через систему рычагов 17, 18 и 30 поворачивает кривошип 19 вокруг оси 33, Хвостовик подвижной губки 21 находит на упор 23, и захват раскрывается. При дальнейшем Повороте кривошипа 19 Ёокруг оси 33 хвостовик подвижной губки сходит с упора 23, и под действием пружины 22 захват зажимает следующий полублок, поступивший на приемный стол. Упор 23 закреплен на кронштейне шарнирно, и хвостовик подвижной губки 21 ироходит мимо пего без раскрывания захвата. Установив полублок в верхнем держателе сварочного автомата, стойка 15 доходит до упора 24 и останавливается. Шток 26 продолжает движение вниз и через систему рычагов 17, 18 и 30 поворачивает кривошип 19 вокруг оси 31. Хвостовик подвижной губки 21 находит на упор 24, и захват раскрывается, освоболчдая полублок. Предмет изобретения Загрузчик стеклоизделий, преимущественно полублоков в сварочный автомат, содержащий приемный стол, механизмы захвата и переноса с поворачивающимися рычагами, ограничительные упоры и пневомопривод, отличающийся тем, что, с целью повышения надежности работы, механизм переноса выполней в виде двух шарнирно связанных рычажных параллелограммов, причем рычаг захвата снабжен компенсирующей связью, а пневмонривод - амортизатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузчик стеклоизделий | 1980 |
|
SU878742A1 |
| Загрузчик стеклоизделий | 1977 |
|
SU685639A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1968 |
|
SU220441A1 |
| Приспособление к сварочной машине для перестановки стеклянных полу блоков с формующей машины | 1949 |
|
SU99948A1 |
| Многосекционная машина для изготовления полых стеклоблоков | 1958 |
|
SU121916A1 |
| Загрузчик стеклоизделий в печь отжига | 1981 |
|
SU947097A1 |
| Установка для декорирования хрустальных ваз | 1985 |
|
SU1279976A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Загрузчик стеклянных полублоков | 1977 |
|
SU687005A1 |
| Устройство для съема листов стекла | 1973 |
|
SU501984A1 |