1
Изобретение относится к области намерения в машиностроении.
Известен способ .комплексного контроля зубчатых колес при однопрофильном и двухпрофильнОМ зацеплении, заключающийся в том, что контролируемое и сопрягаемое колеса обкатывают и регистрируюпг погрешность сопряжения.
Однако прИ контроле по известному способу в процессе непрерывного обката в заценление с контролируемым зубчатым колесом входят последовательно все зубья сопрягаемого (измерительного ) колеса, имеющие свои погрешности изготовления, а результат совместного взаимодействия колес фиксируют. Поэтому в результат контроля полностью входит погрешность изготовления сопрягаемого (измерительного) зубчатого колеса. Эта погрешность соизмерима с погрешностью контролируемого зубчатого колеса особенно при контроле зубчатых колес высокой степени точности.
Для повышения точности контроля предлагается способ, по которому регистрируют в процессе непрерыв,ного обката пары зубчатых колес .погрешность сопряжения всех зубьев контролируемого колеса с одноименным зубом сОПряженного колеса, обладающим наименьшей погрешностью профиля, и строят кривую погрешностей сопряжения в
порядке последовательного изменения нумерации зубьев контролируемого колеса.
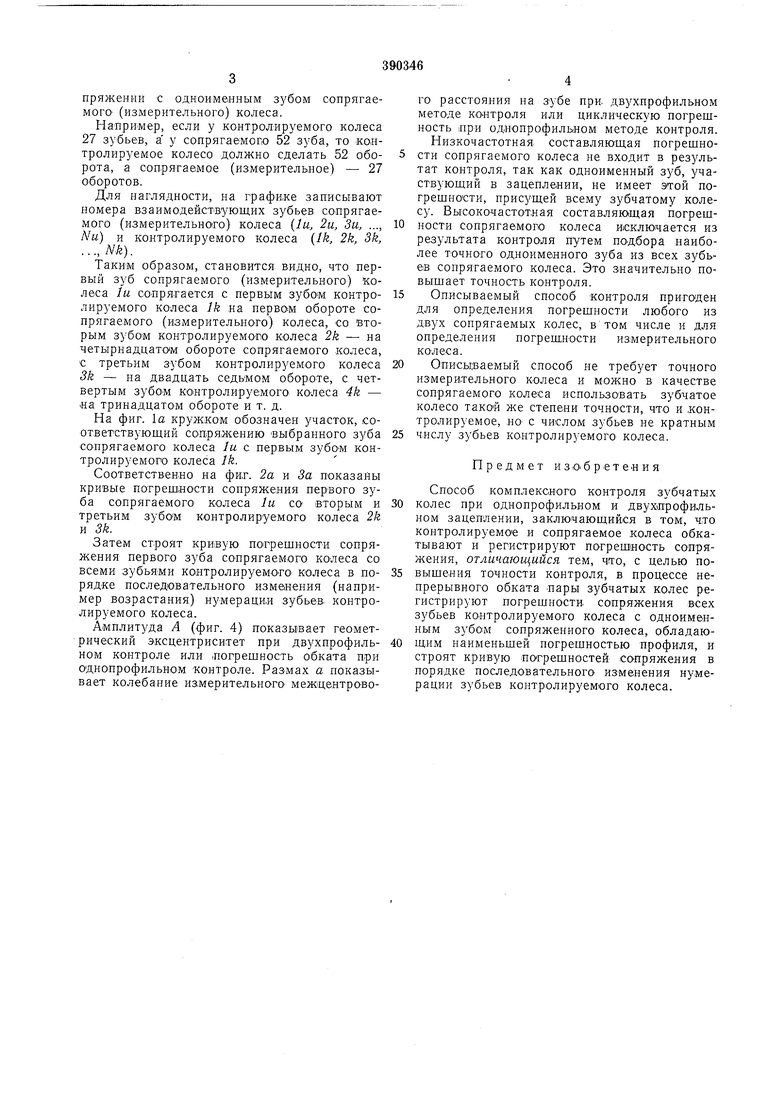
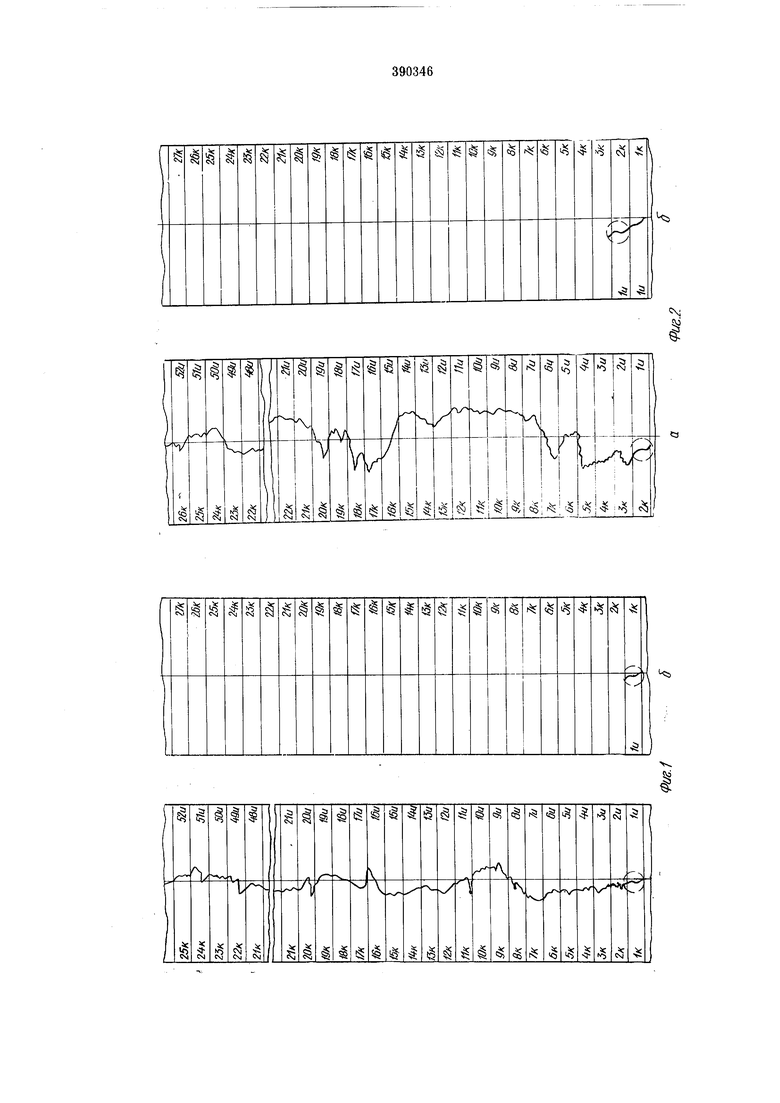
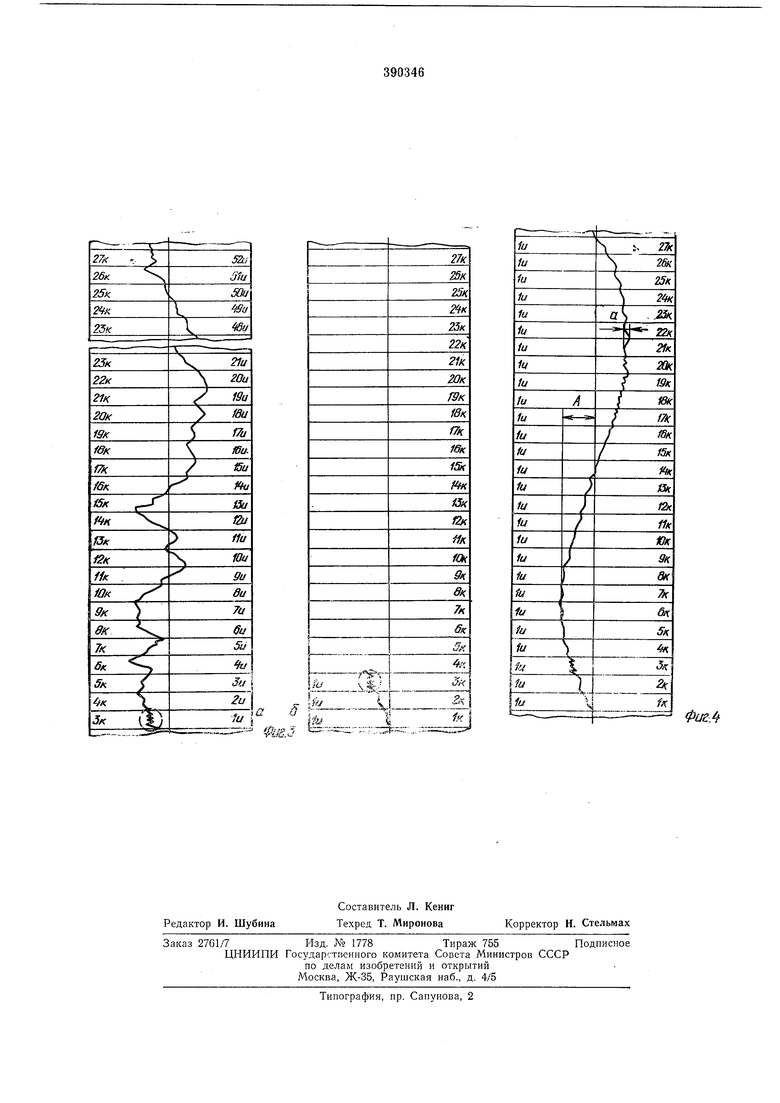
На фиг. 1а показан график взаимодействия зубьев, соответствующего первому обороту сопрягаемого- (измерительного) колеса; на фиг. 16 - график взаимодействия первого зуба сопрягаемого колеса с первым зубом контролируемого колеса; на фиг. 2а - график взаимодействия зубьев, соответствующего четырнадцатому обороту сопрягаемого колеса; на фиг. 26 - график взаимодействия первого зуба сопрягаемого колеса со вторым зубом контролируемого колеса; на фиг. За - график взаимодействия зубьев, соответствующего двадцать седьмому обороту сопрягаемого колеса; на фиг. 36 - график взаимодействия первого зуба сопрягаемого колеса с третьим зубом контролируемого колеса; на фиг. 4 - график погрешности контролируемого зубчатого колеса.
Способ реализуют следующим образом.
Контролируемое зубчатое колесо и сопрягаемое с ним из:мерительное зстанавливают на при:боре для комплексного двухпрофильного или однопрофильного контроля, приводят в зацепление и начинают непрерывный обкат этих колес. Погрешности сопряжения непрерывно регистрируют самописцем. Контролируемому колесу дают такое количество оборотов, чтобы все его зубья побывали в сопряжении с одноименным ззбом сопрягаемогО (измерительного) колеса.
Например, если у контролируемого колеса 27 зубьев, а у сопрягаемого 52 зуба, то контролируемое колесо должно сделать 52 оборота, а сопрягаемое (измерительное) - 27 оборотов.
Для наглядности, на графЕке записывают номера взаимодействующих зубьев сопрягаемого (измерительного) колеса (1и, 2и, Зи, ..., NU) и контролируемого колеса (tk, 2k, 3k, ...,Nk).
Таким образом, становится видно, что первый зуб солрягаемого (измерительного) колеса /ы сопрягается с первым зубом контролируемого колеса Ik ,на первом обороте сопрягаемого (измерительного) колеса, со вторым зубом контролируемого колеса 2k - на четырнадцатом обороте сопрягаемого колеса, с третьим зубом контролируемого колеса 3k - на двадцать седьмом обороте, с четвертым зубом контролируемого колеса 4k - «а тринадцатом обороте и т. д.
На фиг. 1а кружком обозначен участок, соответствующий сопряжению выбранного зуба сопрягаемого колеса lu с первым зубом контролируемого колеса Ik.
Соответственно на фиг. 2а и За показаны кривые погрешности сопряжения первого зуба сопрягаемого колеса 1и со вторым и третьим зубом контролируемого колеса 2k и 3k.
Затем строят кривую погрешности сопряжения первого зуба сопрягаемого колеса со всеми зубьями контролируемого колеса в порядке последовательного изменения (например возрастания) нумерации зубьев, контролируемого колеса.
Амплитуда А (фиг. 4) показывает геометрический эксцентриситет при двухпрофильном контроле или .погрешность обката при однопрофильном контроле. Размах а показывает колебание измерительного межцентрового расстояния на зубе при. двухпрофильном методе контроля или циклическую погрешность при однопрофильном методе контроля. Низкочастотная составляющая погрешности сопрягаемого колеса не входит в результат контроля, так как одноименный зуб, участвующий в зацеплении, не имеет этой погрещности, присущей всему зубчатому колесу. Высокочастотная составляющая погрешности сопрягаемого колеса исключается из результата контроля путем п.о.дбора наиболее точного одноименного зуба из всех зубьев сопрягаемого колеса. Это значительно повышает точность контроля.
Описываемый способ контроля пригоден для определения погрешности любого из двух сопрягаемых колес, в том числе и для определения погрешности измерительного колеса.
Описываемый спо.соб не требует точного измерительного колеса и можно в качестве сопрягаемого колеса использовать зубчатое колесо такой же степени точности, что и .контролируемое, но с числом зубьев не кратным
чнслу зубьев ко.нтролируемого колеса.
Предмет изо.бретения
Способ комплексного контроля зубчатых колес при однопрофильном и двухярофильном зацеплении, заключающийся в том, что контролируемое и сопрягаемое колеса обкатывают и регистрируют погрешность сопряжения, отличающийся тем, что, с целью повышения точности контроля, в процессе непрерывного обката .пары зубчатых колес регистрируют погрешности, сопряжения всех зубьев ко.нтролируемого колеса с одноименным зубом сопряженного колеса, обладающим наименьшей погрешностью профиля, и строят кривую погрешностей сопряжения в порядке последовательного изменения нумерации зубьев контролируемого колеса.
N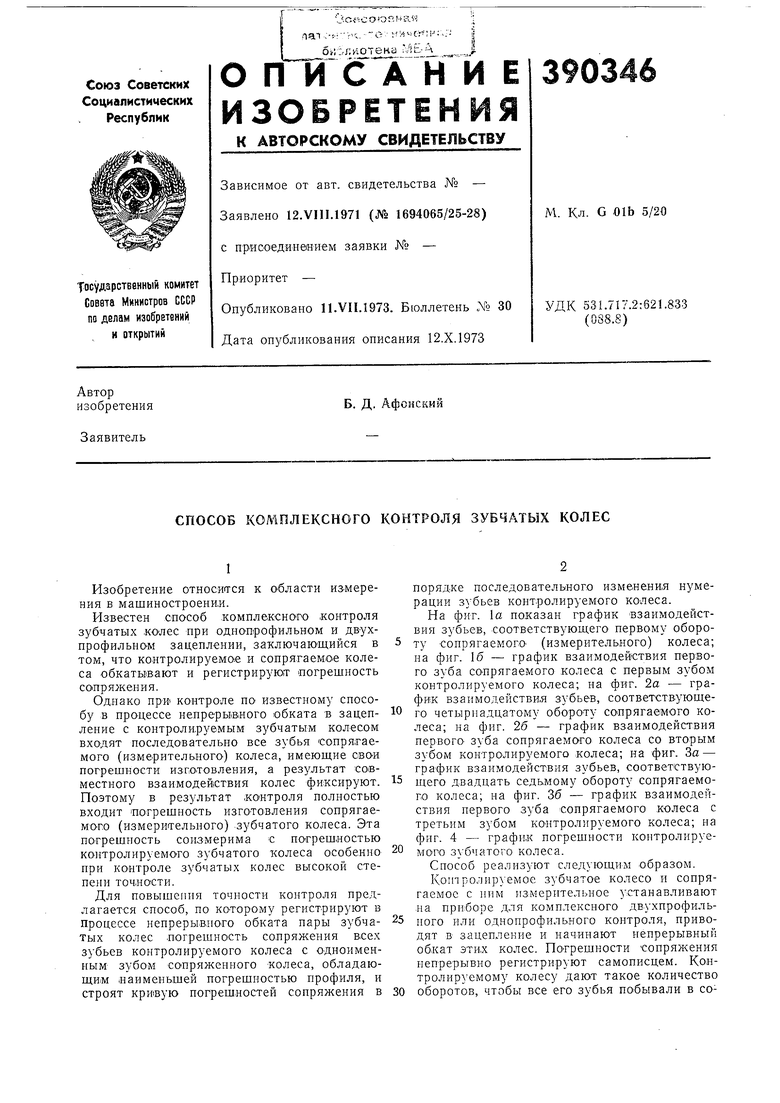
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС | 1973 |
|
SU393570A1 |
| Способ определения погрешности зубчатых колес | 1982 |
|
SU1062507A1 |
| Способ контроля зубчатых колес | 1980 |
|
SU920363A1 |
| Способ комплексного однопрофильного контроля зубчатых колес | 1981 |
|
SU962751A1 |
| Способ измерения радиального биения венцов зубчатых колес и устройство для его осуществления | 1988 |
|
SU1642224A1 |
| Способ измерения радиального биения зубчатых колес и устройство для его осуществления | 1987 |
|
SU1495638A1 |
| Способ определения координат начала и конца контролируемого участка зацепления | 1976 |
|
SU577391A1 |
| Способ комплексного двухпрофильного контроля гибких зубчатых колес | 1981 |
|
SU1004741A1 |
| Способ однопрофильного контроля пары зубчатых колес | 1982 |
|
SU1024689A1 |
| Способ определения прерывной кинематической погрешности зубчатых колес | 1976 |
|
SU599154A1 |
5
5
Ч
Й
A
1
§
l
1
C5
«
с
Ш
---,-- - ; ...-... .
Фиг..}
