1
Изобретение относится к механизации и автоматизации автоматической смены инструмента в металлообрабатывающих станках.
Известны четырехзахватные автооператоры с механизмом зажима, перемещения и поворота захватов.
Предлагаемый автооператор отличается тем, что его механизм зажима, перемещения и поворота захватов выполнен в виде силового цилиндра, на поворотном штоке которого установлены захваты, приводимые от конического упора неподвижного корпуса цилиндра.
Это упрощает ко нструкцию устройства.
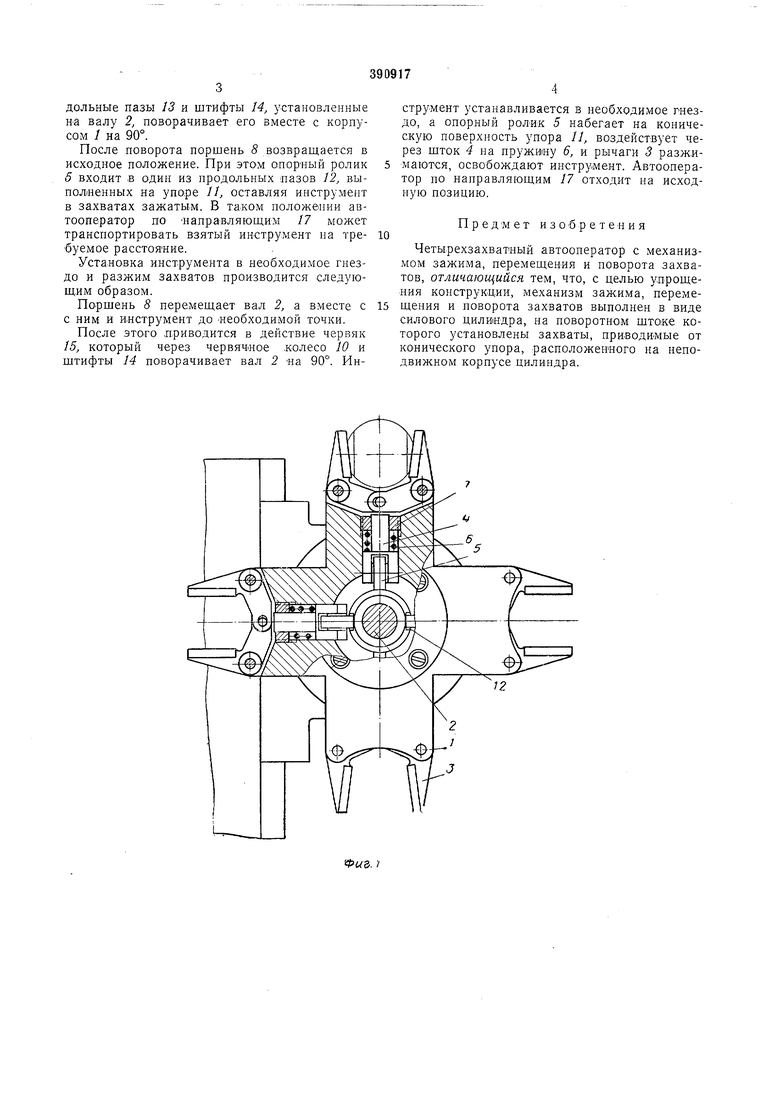
iia фиг. 1 показан автооператор, .поперечный разрез; на фиг. 2 - то же, продольный разрез.
Крестообразный корпус 1 автооператора установлен на валу 2.
По сторонам корпуса шарнирно и попарно установлены двуплечие рычаги 3, одно плечо которых служит губкой, а другое шарнир но связано с концом соответствующего штока 4, установленного в корпусе /. На других концах штоков расположены олорные рол.ики 5. Каждый шток несет на себе силовую пружину 6, которая взаимодействует со штоком и через упорную гайку 7 с корпусом /.
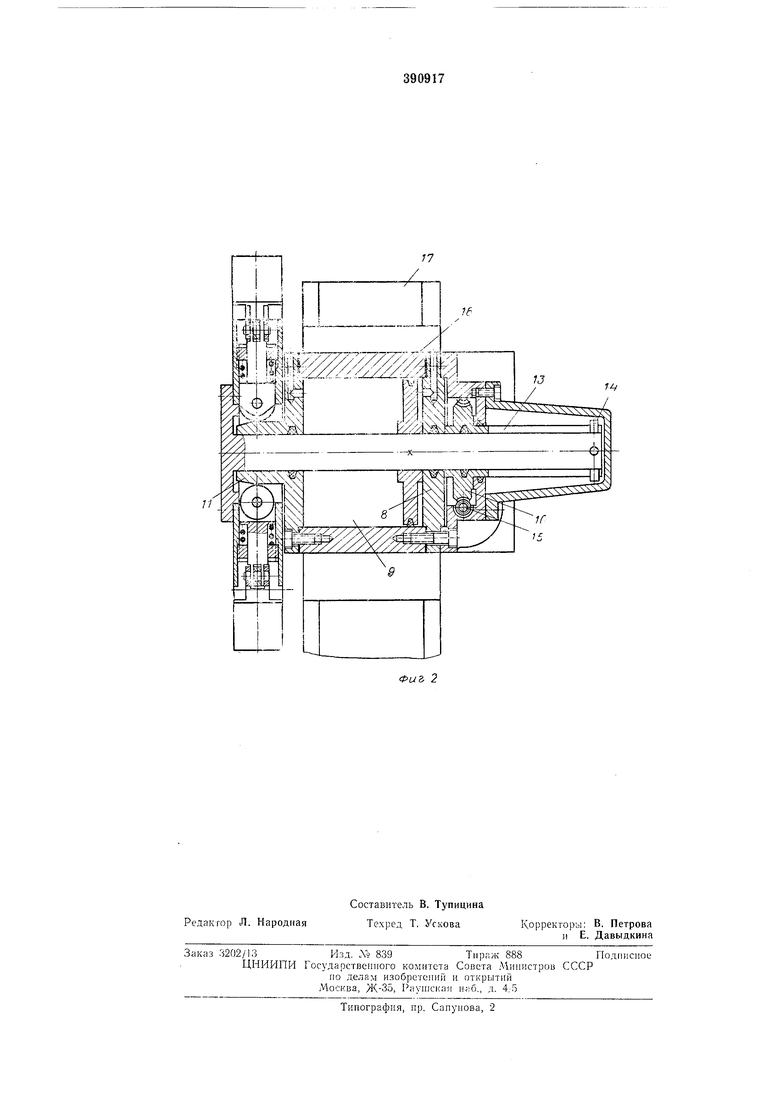
Па валу 2 установлены порщень 8 силового цилиндра 9 и свободно расположенное колесо JO. На силовом цилиндре 9 находится упор
11 с двумя противолен ащими пазами 12. На ступице червячного колеса 10 выполнены продольные пазы 13, а на валу 2 взаимодействующее с этими пазами штифты 14. Червячное колесо 10 сцеплено с червяком 15, вал которого соединен с двигателем.
Силовой цилиндр 9 расположен в корпусе 16 механизма перемещения, который уста1;овлен на направляющих 17.
Автоолератор работает следующим образом.
Он перемещается по направляющим в сторону магазина инструментов и захватывает подготовленный инструмент.
Для зажима .инструмента захватами поршень 8 совместно с валом 2 и установленным на нем корлусом 1 крестообразной руки перемещается вдоль оси вала. При этом опорный ролик 5, прижатый силовой пружиной 6, перемещается по конической поверхности упора 11. Шток 4 перемещается в направлении, перпендикулярном оси вала 2, увлекая за собой шарнирно с НИМ связанные концы рычагов 3, поворачивая их в шарнирах корлуса 1. Происходит зажим.
Зажатый инструмент извлекается из гнезда магазиНа инструментов дальнейшим перемещением поршня 8. Затем приходит в действие червяк 15, взаимодействующий с червячным колесом 10, а последнее через продольные пазы 13 и штифты 14, установленные на валу 2, поворачивает его вместе с корпусом / на 90°.
После поворота поршень 8 возвращается в исходное положение. При этОМ олорный ролик б входит в один из продольных пазов 12, выполяенных на упоре 11, оставляя инструмент в захватах зажатым. В таком положении автооператор по Направляющим 17 может транспортировать взятый инструмент на требуемое расстояние.
Установка инструмента в необходимое гнездо и разжим захватов производится следуюш;,им образом.
Поршень 8 перемешает вал 2, а вместе с с ним и инструмент до необходимой точки.
После этого .приводится в действие червяк 15, который через червячное .колесо 10 и штифты М поворачивает вал 2 на 90°. Инструмент устанавливается в необходимое гнездо, а опорный РОЛИК 5 набегает на коническую поверхность упора //, воздействует через шток 4 на пружину 6, и рычаги 3 разж,имаются, освобождают инструмент. Автооператор по направляющим 17 отходит на исходную позицию.
Предмет изобретения
Четырехзахватный автооператор с механизмом зажима, перемещения и поворота захватов, отличающийся тем, что, с целью упрощения конструкции, механизм заж,има, перемещения и поворота захватов выполнен в виде силового цилиндра, на поворотном щтоке которого установлены захваты, приводимые от конического упора, расположенного на неподвижном корпусе цилиндра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Револьверная головка | 1989 |
|
SU1763098A1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Устройство для крепления держателей инструмента | 1989 |
|
SU1673321A1 |
| Устройство для автоматической смены инструмента на металлорежущем станке | 1984 |
|
SU1252113A1 |
| Автооператор | 1976 |
|
SU729028A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Многозахватный автооператор | 1979 |
|
SU776863A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Автооператор | 1974 |
|
SU554129A1 |
77
r
