1
Изобретение относится к системам автоматического управления и йожет быть использовано при построений многомерных экстремальных регуляторов с инерционными объектами регулирования и при применении счетно-решающих приборов совместно с исполнительным устройством для организации движения в экстремум.
Известна система экстремального регулирования п-мерных инерционных объектов, содержащая генератор поисковых колебаний соединенный через программное устройство с одним из входов объекта регулирования, и вычислитель компонент градиента, выход кбторого через исполнительные устройства подсоединен к соответствующим вхЬдам объекта регулирования, выход которого соединен со вторым входом программного устройства 1.
Однако точность работы и надёжность известной системы недостаточны.
С целью повышения точности работы и надежности предложенная система экстремального регулирования содержит последовательно соединенные блок вычисления времени запаздывания и дифференциатор, выход которого соединен со входом вычис2
лителя компонент градиента, а вход - с выходом объекта регулирования, второй выход программного устройства соединен со входом вычислителя времени запаздывания.
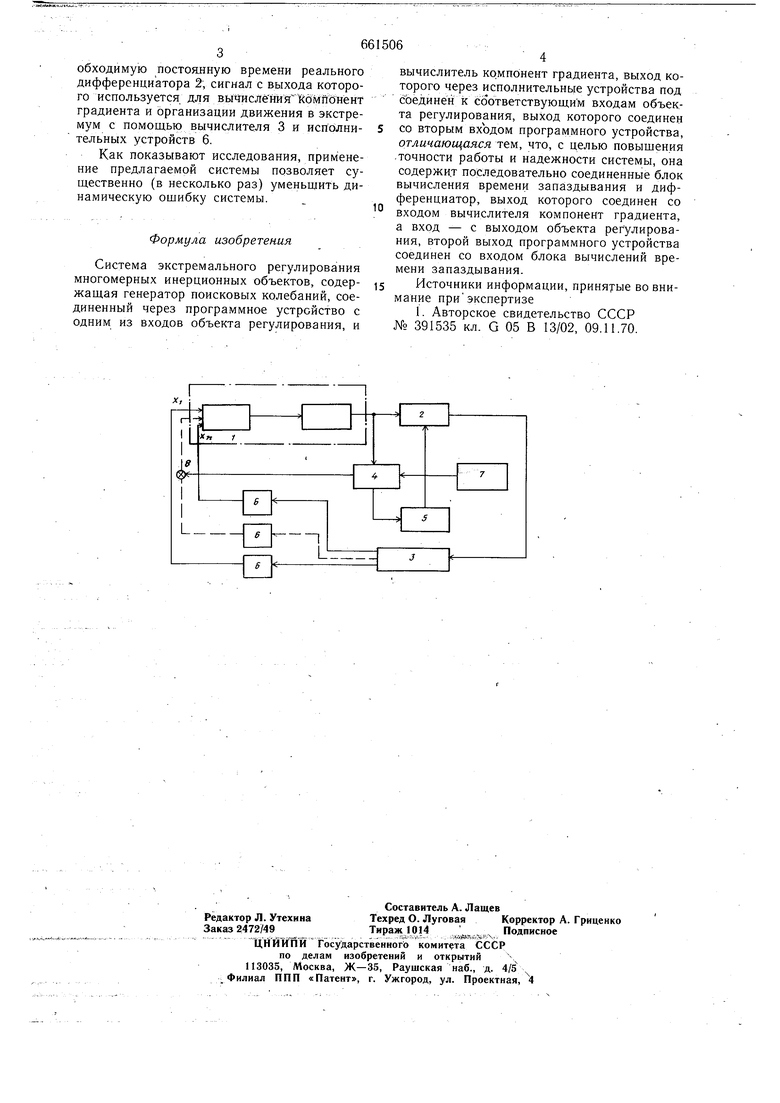
На чертеже изображена функциональная схема системы.
Выход объекта регулирования 1 через дифференциатор 2 (корректирующее звено) подключен к вычислителю 3 компонент градиента, а через программное устройство 4 к блоку вычислений 5 времени запаздывания с исполнительным устройством, выход которого подключен ко второму входу дифференциатора 2. Выходы вычислителя 3 через исполнительные устройства 6 подключены к соответствующим входам объекта I. Выход генератора поисковых колебаний 7 через программное устройство 4 подключен к сумматору 8 одного из каналов.
Система работает следующим образом.
Программное устройство 4 с необходимой периодичностью подключает выход генератора 7 к сумматору 8 и выход объекта 1 к блоку вычислений 5, который по фиксированным значениям сигнала на выходе объекта 1 определяет его постоянную времени запаздьшания и устанавливает необходимую постоянную времени реального дифференциатора 2, сигнал с выхода которого используется для вычислёнияКомпОнёнт градиента и организации движения в экстремум с помощью вычислителя 3 и исполнительных устройств 6.
Как показывают исследования, применение предлагаемой системы позволяет существенно (в несколько раз) уменьшить динамическую ошибку системы.
Формула изобретения
Система экстремального регулирования многомерных инерционных объектов, содержащая генератор поисковых колебаний, соединенный через программное устройство с одним из входов объекта регулирования, и
вычислитель компонент градиента, выход которого через исполнительные устройства под соединен к сбответствующим входам объекта регулирования, выход которого соединен со вторым входом программного устройства, отличающаяся тем, что, с целью повышения .точности работы и надежности системы, она содержит последовательно соединенные блок вычисления времени запаздывания и дифференциатор, выход которого соединен со входом вычислителя компонент градиента, а вход - с выходом объекта регулирования, второй выход программного устройства соединен со входом блока вычислений времени запаздывания.
Источники информации, принятые во внимание приэкспертизе
1. Авторское свидетельство СССР № 391535 кл. G 05 В 13/02, 09.11.70.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулированияОдНОМЕРНыХ иНЕРциОННыХ Об'ЕКТОВ | 1979 |
|
SU824129A1 |
| СИСТЕМА ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ л-МЕРНЫХ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU391535A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1980 |
|
SU911460A2 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВНУТРЕННЕЙ ЕМКОСТНОЙ ЭНЕРГИЕЙ ОБЪЕКТА С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 2010 |
|
RU2474857C2 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1146084A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
