1
Изобретение от осится к промышленному транспорту, а именно к устройствам для передачи Н1ту4иых грузов с одного конвейера на другой.
Известны устройства для передачи штучных грузов с одного конвейера на другой, содержащие подаюш.ий и приемный конвейеры и расположенный между ними перегрузочный механизм с пневматическим приводом и концевые воздушные выключатели.
Однако известные устройства занимают большие производственные площади и малоэффективны.
Цель изобретения - повышение эффективности работы устройства.
Это достигается тем, что перегрузочный механизм выполнен в виде опорной рамы с шарнирно закрепленными на ней вильчатыми рычагами-копирами и неподвижными вертикальными направляющими, по которым на ходовых роликах перемещается каретка, снабженная направляющими для груза, выполненными в виде уголков с прикрепленными к ним роликами управления рычагами-копирами, обеспечивающими смыкание их верхией вильчатой части при перемещении каретки вниз и размыкание рычагов при подъеме каретки вверх, датчиком включения концевых воздушных выключателей свободной или загруженной каретки, связаииым посредством пневмоС51стемы с нневмотолкателем, сдвигающим груз с каретки на приемный ко.нвейер, а также с установленным на приемном конвейере датчиком свободного или занятого Л1еста ла конвейере.
В таком устройстве датчик включения концевых воздушных выключателей свободной или загруженной каретки может быть выполнен в виде подпружинениото двуплечего рычага, снабженеого регулируемыми по высоте площадками включеиия концевых выключателей и роликом, установленным на длинном колце рычага и обеспечивающим включение концевого воздущного выключателя под действием веса штучного груза, а датчик свободного или занятого места конвейере может быть выполнен в виде подпружиненного рычага, на вертикальном плече которого установлена пластИ:на с рядом роликов, обесиечиваюн;ая включение пневмотолкателя только при наличии свободного места на конвейере.
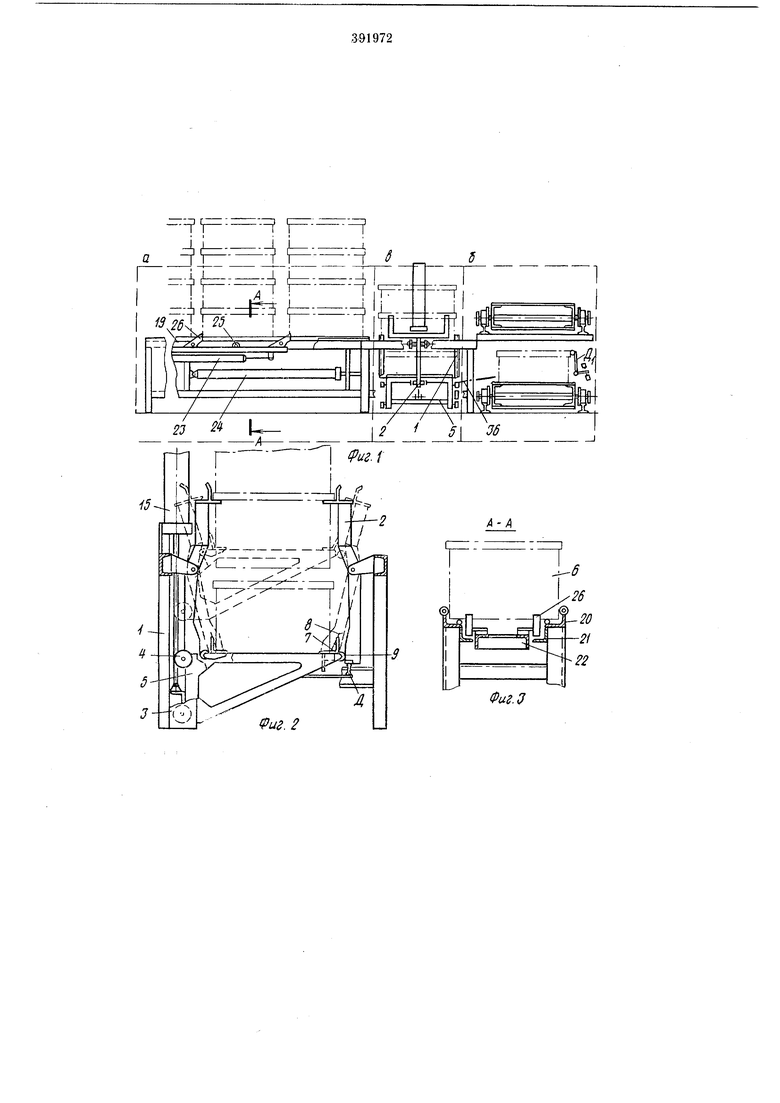
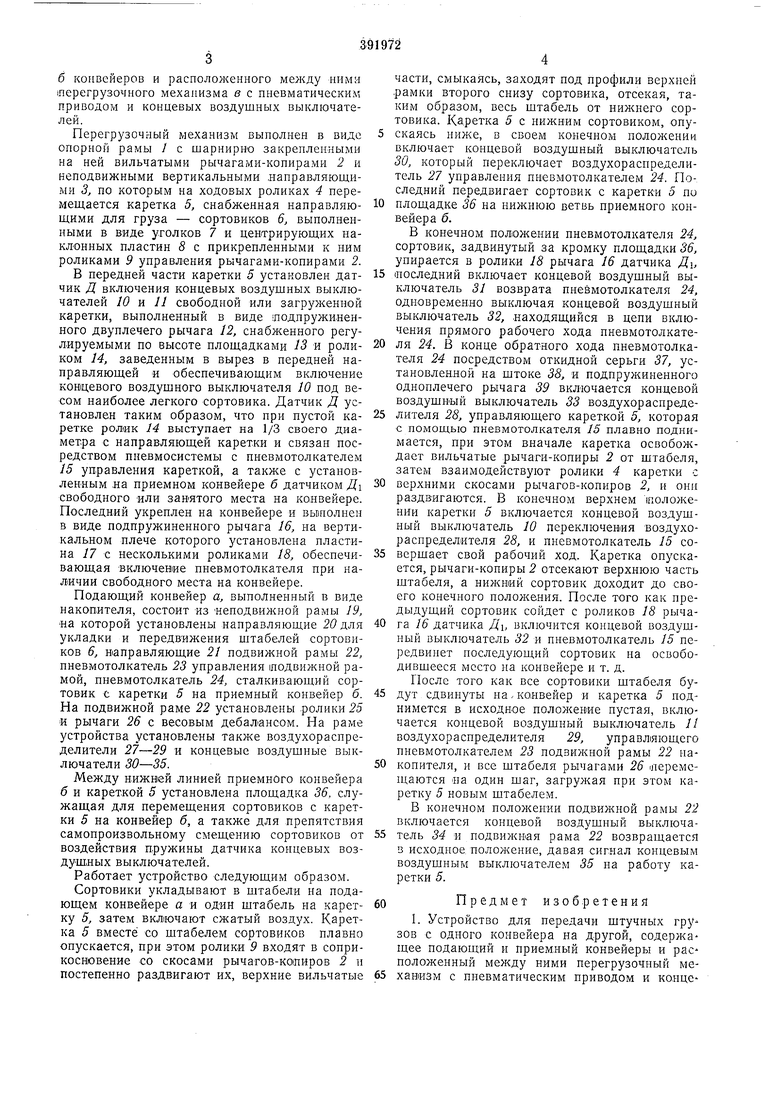
На фиг. 1 изображено предлагаемое устройство, об)ций вид; на фиг. 2 - рычаги-копиры и каретка, вид сбоку; на фиг. 3 - разрез ио
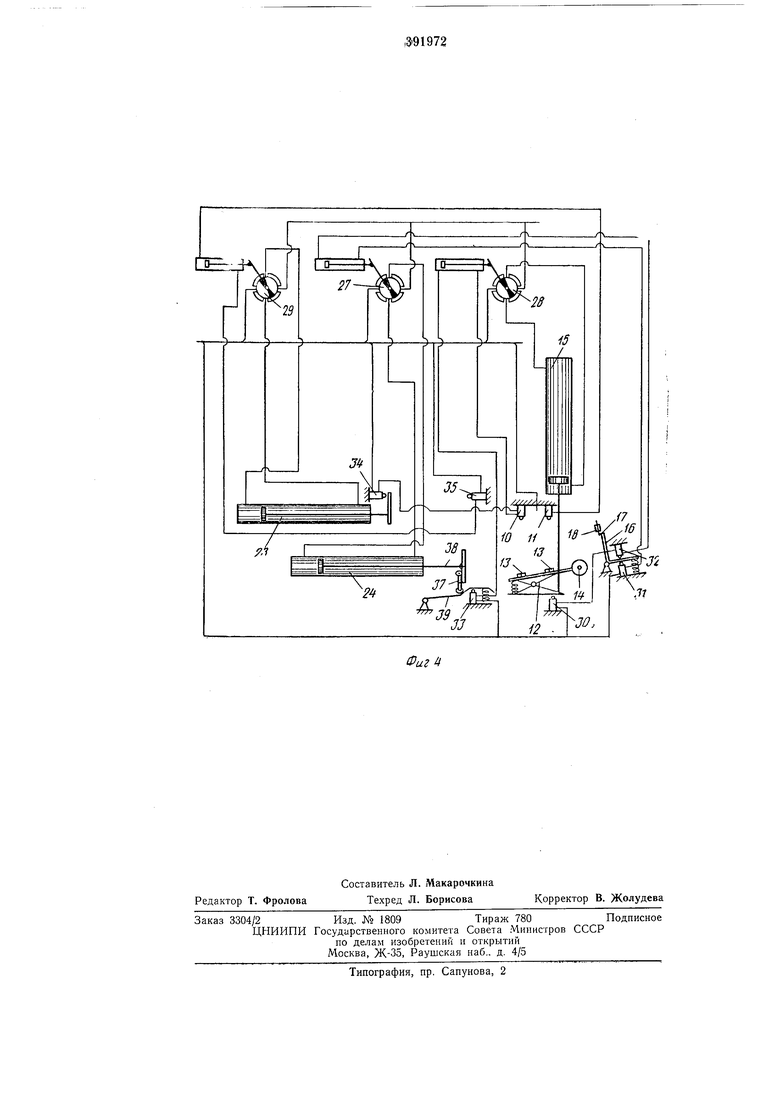
/1-.4 на фиг. 1; на фиг. 4 - принципиальная схема пневматического привода с датчиками концевых воздушных выключателей.
Предлагаемое устройство длЯ нередачч щтучных грузов, например пустой тары - сортовиков, состоит из подающего а и приемного б конвейеров и расположенного между ними перегрузочного механизма в с пневматическим приводом и концевых воздушных выключателей. Перегрузочный механизм выполнен в виде опорной рамы / с шарнирно закренленными на ней вильчатыми рычагами-копирами 2 и неподвижными вертикальными .направляющими 3, по которым на ходовых роликах 4 перемещается каретка 5, снабженная направляющими для груза - сортовиков 6 выполненньши в виде уголков 7 и центрируюш,их наклонных пластин 5 с прикрепленными к ним роликами 9 управления рычагами-копирами 2. В передней части каретки 5 установлен датчик Д включения концевых воздушных выключателей 10 и 11 свободной или загруженной каретки, выполненный в виде иодпружиненного двуплечего рычага 12, снабженного регул.ируемыми по высоте площадками 13 и роликом 14, заведенным в вырез в передней направляющей и обеспечивающим включение концевого воздущного выключателя 10 под весом наиболее легкого сортовика. Датчик Д установлен таким образом, что при пустой каретке ролик J4 выступает на 1/3 своего диаметра с направляющей каретки и связан посредством пневмосистемы с пневмотолкателем 15 управления кареткой, а также с установленным на приемном конвейере б датчиком Дг свободного или занятого места на конвейере. Последний укреплен на конвейере и выполнен в виде подпружиненного рычага 16, на вертикальном плече которого установлена пластина 17 с несколькими роликами 18, обеспечивающая включение пневмотолкателя при наличии свободного места на конвейере. Подающий конвейер а, выполненный в виде накопителя, состоит из неподвижной рамы 19, на которой установлены направляющие 20 для укладки и передвижения штабелей сортовиков 6, направляющие 21 подвижной рамы 22, пневмотолкатель 23 управления шодвижной рамой, пневмотолкатель 24, сталкивающий сортовик с каретки 5 на приемный конвейер б На подвижной раме 22 установлены .ролики 25 к рычаги 26 с весовым дебалансом. На раме устройства установлены также воздухораспределители 27-29 и концевые воздушные выключатели 30-35. Между нижней линией приемного конвейера б и кареткой 5 установлена площадка 36, служащая для перемещения сортовиков с каретки 5 на конвейер б, а также для препятствия самопроизвольному смещению сортовиков от воздействия пружины датчика концевых воздушных выключателей. Работает устройство следующим образом. Сортовики укладывают в щтабели на подающем конвейере а и один штабель на каретку 5, затем включают сжатый воздух. Каретка 5 вместе со штабелем сортовиков плавно опускается, при этом ролики 9 входят в сопри косновение со сковами рычагов-копиров 2 и постепенно раздвигают их, верхние вильчатые части, смыкаясь, заходят под профили верхней рамки второго снизу сортовика, отсекая, таким образом, весь штабель от нижнего сортовика. Каретка 5 с нижним сортовиком, опускаяеь ниже, в своем конечном положении включает концевой воздушный выключатель 30, который переключает воздухораснределитель 27 управления пневмотолкателем 24. Последний передвигает сортовик с каретки 5 по площадке 36 на нижнюю ветвь приемного конвейера б. В конечном положении пневмотолкателя 24, сортовик, задвинутый за кромку площадки 36, упирается в ролики 18 рычага J6 датчика Дь последний включает концевой воздущный выключатель 31 возврата пневмотолкателя 24, одновременно выключая концевой воздушный выключатель 32, .находящийся в цепи включения нрямого рабочего хода пневмотолкателя 24. В конце обратного хода пневмотолкателя 24 посредством откидной серьги 37, установленной на щтоке 38, и подпружиненного одноплечего рычага 39 включается концевой воздущный выключатель 33 воздухорасиределителя 28, управляющего кареткой 5, которая с помощью пневмотолкателя /5 плавно поднимается, при этом вначале каретка освобождает вильчатые рычаги-копиры 2 от штабеля, затем взаимодействуют ролики 4 каретки с верхними скосами рычагов-копиров 2, и они раздвигаются. В конечном верхнем шоложении каретки 5 включается концевой воздущный выключатель 10 переключения воздухораспределителя 28, и пневмотолкатель 15 совершает свой рабочий ход. Каретка опускается, рычаги-копиры 2 отсекают верхнюю часть штабеля, а нижний сортовик доходит до своего конечного положения. После того как предыдущий сортовик сойдет с роликов 18 рычага /Сдатчика Дь включится концевой воздущный выключатель 32 и пневмотолкатель 15 передвинет последующий сортовик на освободивщееся место на конвейере и т. д. После того как все сортовики щтабеля будут сдвинуты на, ко.нвейер и каретка 5 поднимется в исходное положение пустая, включается концевой воздущный выключатель 11 воздухораспределителя 29, управляющего пневмотолкателем 23 подвижной рамы 22 накопителя, и все щтабеля рычагами 26 .перемещаются на один шаг, загружая при этом каретку 5 новым щтабелем. В конечном положении подвижной рамы 22 включается концевой воздушный выключатель 34 и подвижная рама 22 возвращается в исходное положение, давая сигнал концевым воздущным выключателем 35 на работу каретки 5. Предмет изобретения 1. Устройство для передачи щтучных грузов с одного конвейера на другой, содержащее подающий и прием.ный конвейеры и расположенный между ними перегрузочный механизм с пневматическим приводом и конце
вые воздушные выключатели, отличающееся тем, что, с целью повышения эффективности работы устройства, перегрузочный механизм выполнен в виде опооной рамы с шарпирно закрепленными па ней вильчатыми рычагамиК01пирами и неподвижными вертикальными направляюидими, по которым на ходовых роликах перемеш,ается каретка, снабженная паправляюшими для груза, выполненными в виде уголков с прикрепленными к ним роликами управления рычагами-копирами, обеспечивающими смыкание их верхней вильчатой части при перемещении каретки вниз и размыкание рычагов при подъеме каретки вверх, датчиком включения концевых воздушных выключателей свободной или загруженной каретки, связанным посредством пневмосистемы с пнепмотолкателем, сдвигающим груз с каретки на приемный конвейер, а таюке с установленным
на приемном конвейере датчиком свободного или занятого места на конвейере.
2.Устройство по п. 1, отличающееся тем, что датчик включения концевых воздушных
выключателей свободной или загруженной каретки выполнен в виде подпружиненного двуплечего рычага, снабженного регулируемыми по высоте площадками включения концевых выключателей и роликом, установленным на
длинном конце рычага и обеспечивающим включение концевого воздушного выключателя под действием веса штучного груза.
3.Устройство по п. 1, отличающееся тем, что датчик свободного или занятого места на
конвейере выполнен в виде подпружиненного рычага, на вертикальном плече которого установлена пластина с рядом роликов, обеспечивающая включение пневмотолкателя только при наличии свободного места на конвейере.
. .
,-Ж
19, L1 ,
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Устройство для загрузки транспортных средств | 1986 |
|
SU1386541A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ очистки ДЕТАЛЕЙ | 1973 |
|
SU375326A1 |
| Устройство для пакетирования плоских изделий | 1985 |
|
SU1306864A1 |
| Перегрузочное устройство штучных транспортных средств | 1975 |
|
SU568580A1 |
| Перегрузочное устройство для сыпучих материалов | 1985 |
|
SU1355575A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Машина для штабелевки свежеотформованных керамических и силикатных изделий, принимаемых от прессов | 1959 |
|
SU126044A1 |
| Погрузочно-разгрузочное устройство для сыпучих грузов | 1971 |
|
SU516582A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |