HsBccTiibi контейиеровозы, содержащие тележку, на которой смонтированы подвнжные опорггая и рабочая рамы и опорно-поворотное устройство. На рабочей раме установлены замки для за.хвата контейнера.
Предлагаемый контейнеровоз отличается тем, что, с целью повышения точности установки контейнера на контейнеровозе, рабочая рама снабжена следящим ме.ханизмом, выполненным в виде нижних направляющих щарнирных лыж с роликами и верхних роликов, связанных с рабочей рамой.
Верхние ролики могут быть установлены на кронштейнах, соединенных с вертикальными шлицевыми валами.
Для о |ускання контейнера второго яруса до уровня пола направляющие шарнирные лыжи следящего механизма установлены носредсгвом кронщтеймов на щлицевых валах н соединены с гидроцилнндрами.
Рабочая рама может быть соединена посредством гидроцилиндра с .подвижной в поперечном направлении рамой, связанной с шарннрными гндроцнлиндрами, расположенными но обе стороны опорио-поворотного устройства.
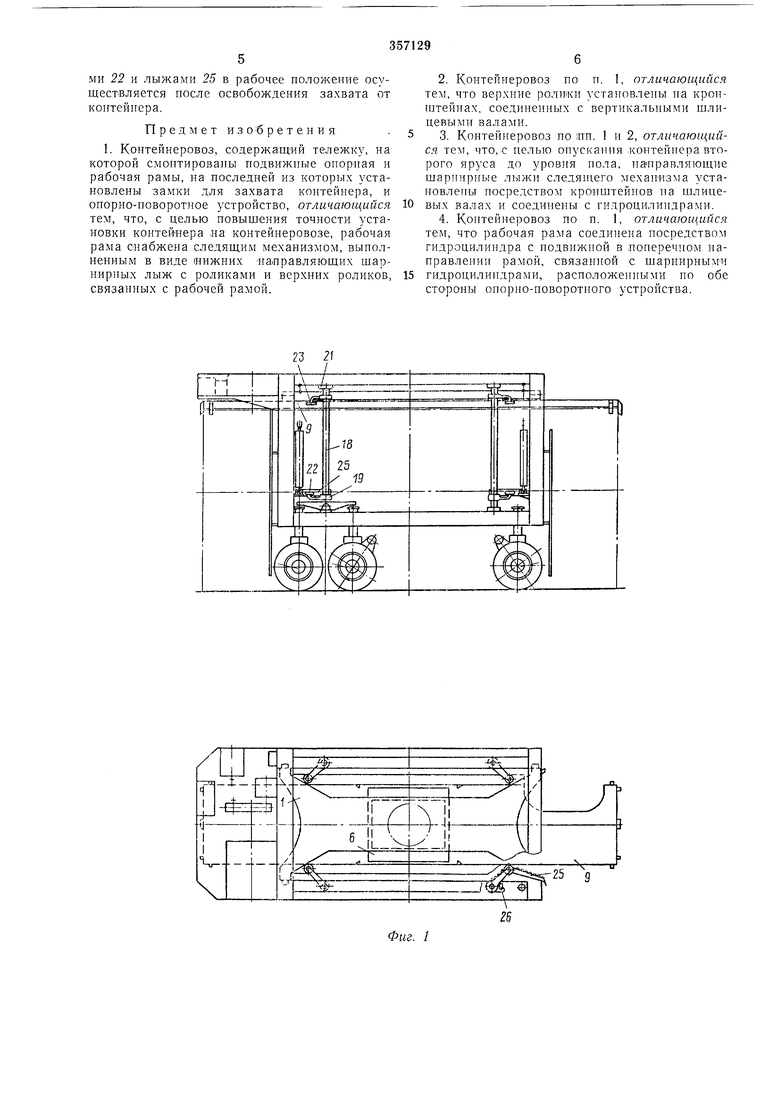
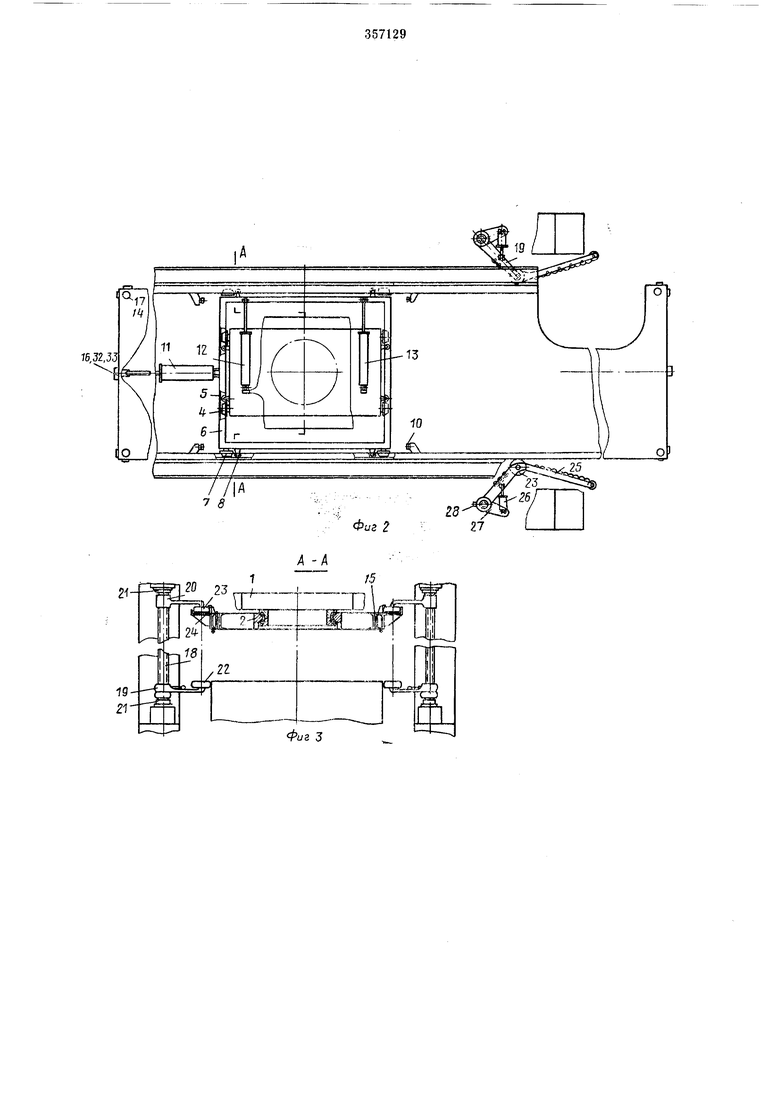
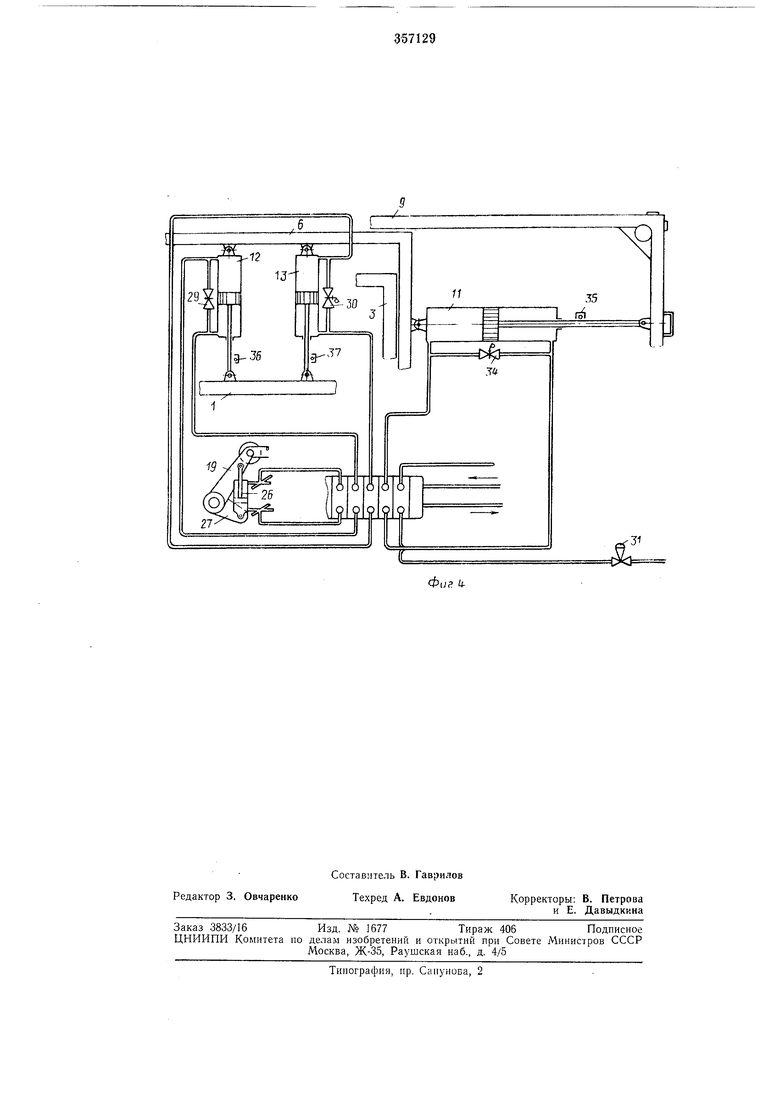
На фиг. 1 изображен описываемый контейнеровоз в двух проекциях; на фиг. 2 - то же, вид спереди; на фиг. 3 - следящий механизм; на фиг. 4 - гидропривод.
онорно-поворотном устройстве 2 установлена рама 3 с катками 4 и дефлекторными роликами 5, но которым в горизонтальной плоскости в направлении, перпендикулярном продольной оси мащины, .может перемещаться рабочая рама 6. Закрепленные па раме 6 катки 7 и дефлекторные ролики 8 удерживают раму 9, которая может пере.мещаться в горизонтальной плоскости вдоль оси машины. Перемещение
рам в горизонтальной нлоскости ограничивается буферами 10 и величииой хода штоков гидроцилиндров //, 12 и 13, удерживающих раму 9 в нейтральном положении.
Цилиндр // нродольного перемещения рамы 9 закреплен на раме 6, а его щток - па раме 9. Цилиндры 12 и J3 поперечного перемещения и поворота рамы 9 или 6, расположенные с разн1)1х сторон опорно-поворотного устройства 2, закреплены на раме 6, а их штоки-
на раме 1. При синхронном движении штоков цилиндров 12 и 13 в одну и ту же сторону осуществляется поперечное перемещение рамы 9 или б, при синхронном движении штоков в разные стороны - поворот рамы 9 или 6, а при
несинхронном движении - поперечное перемещение и поворот рамы 9 или 6.
По углам рамы 9 в вертикальио подвижных корпусах 14 смонтированы штыковые .поворотные замки 15. Кроме того, на обеих торцовых
ры 16. Корпусы 14 штыковых замков J5 имеют в опорном стакане 17 свободный ход, что обеспечивает компенсацию возможной непараллельности рамы захвата и поверхности причала (контейнера), неравномерной просадки шип и др. Механизм поворота штыковых замков 75 расположен в корпусе 14, врашение которого в опориом стакане Г/ исключается. Захват в целом снабжен необходимыми блокировочными и сигнальными устройствами обычного типа, обеопечиваюп ими безопасность его работы.
11еремеш,ение рамы У из исходного положения в позицию, соответствующую захвату контейнера, осуществляется следящпм механизмом, а возврат в исходное положение - автоматически от гидропривода машины. Помимо этого, может быть предусмотрено и ручное управление перемещениями рамы 9.
Следящий механизм состоит из четырех комплектов попарно связанных щлицевыми валами М кронштейиов 19 и 20 (нижних и верхних). Шлицевые валы 18 удерживаются опорами 21, закреплепными па боковых балках металлоконструкции портала. Кронштейны и 20 несут контактные .колеса 22 и 23. Верхние контактные колеса 23 входят в направляющие 24 рамы 9. При подъеме и опускании рамы 9 верхние кронштейны 20 вместе с контактными колесами 23 леремещаются вдоль шлицевых валов 18. Нижние контактные колеса 22 установлены на уровне верхней обвяза и контейнера, уложенного на .пол, и обхватывают контейнер при наезде автоконтейнеровоза на него. К кронштейнам 19 нрикренлены роликовые лыжи 25, обеспечивающие направление контактных колес 22 на контейнер.
Установка лыж 25 на кронштейнах 19 выполнена с небольшим свободным ходом, достаточным для открывания кранов 29 и 30.
При подъеме и опускании «онтейнерл нижние кроиштейны 19 вместе с лыжами 25 и контактными колесами 22 разворачиваются в сторону металлоконструкций портала при помощи гидроцилиндров 26. 1 идроцилипдры i6кренятся к кропштейнам 27, установленным па щлицевых валах 18 неподвижпо, а их щтоки- к кронштейнам 19, которые посажены на ступицы кронштейнов 2/ по ходовой посадке. 1 идроцилиндры 26 имеют гидрозамки.
При наезде автокоптейнеровоза на контейнер последний входит в роликовые лыж-и 25 первой пары шлицевых валов 18, которые паправляют пижние контактпые колеса 22 на контейнер. При отклонении лыж 25 и коитактпых колес 22 от нейтрального положепия в пределах свободного хода срабатывает электрический концевой выключатель 28, под воздействием которого краны 29 и 30 открываются, и полости цилиндров 12 -и 13 по.парно соединяются.
В результате движение контактных колес 22 передается через кронштейны 19, гидроцилиндры 26 поворота, кронштейны 27, шлицевые валы 18, кронштейны 20, коитактные колеса 23 и направляющие 24 на раму 9. Одновременно с этим от того же концевого выклю чателя 28 в гидроагрегате 31 производится снпжение скорости передвижения автоконтейнеровоза. При дальнейшем движении машины на контейнер набегают роликовые лыжи 25 второй пары шлицевых валов 18, а затем и их нижние контактные колеса 22. Их смещение таким же образом передается через вторую пару верхних контактных колес 2з на второй
конец рамы 9. При этом продольная ось рамы 9 совмещается с нродольной осью контейнера. Сигнал от «онцевых выключателей 28 второй нары шлицевых валов 18 воздействует на защелку 32 унора 16, которая освобождает
его. При этом упор 16 нод действием своего веса опускается и при дальнейше.м движении автоконтейнеровоза упирается в задний но движению машины торец захватываемого контейнера первого или второго яруса. Одновременно с опусканием упора 16 по сигналу от концевого выключателя 33 открывается кран cj- соединяя полости цилиндра Jl продольцого перемещения рамы захвата 9. При встрече упора 16 с торцо.м контейнера автоконтейнеровоз тормозится до ЦОЛ.НОЙ остановки, и дается команда на опускание рамы 9.
При движении машины в процессе торможения рама 9 движется вдоль рамы 6. Таким образом, ее центр удерживается над центром
контейнера, а штыки замков - над фитингами контейнера. Тормозной путь машины должен быть мепьще продольного хода рамы 9. При опускании рамы 9 на контейнер щтыки замков 1й входят в фитинги и после унора в верхнюю
поверхность контейнера разворачиваются и блокируются. Затем следует подъем рамы 9 с захваченным контейнером. После подъема контейнера на высоту 70 мм под воздействием концевых выключателей 35, 36 и 37, установленных на щтоках гидроцилиндров 11, 12, 13, переключаются краны 29, 30 и 34, .и под воздействием гидроцилиндров 11, 12, 13 рама 9 вместе с контейнером устанавливается в нейтральное ноложение. Предварительная подготовка электросхем привода золотников гидрораспределителя производится концевыми выключателями 28 нервой и второй пары шлицевых валов. Одновременно с этим упор 16 рамы 9 электромагнитом поднимается и ставится на защелку 32.
При срабатывании блокировки штыковых замков 16 и установки ра.мы 9 с контейнером в нейтральное ноложение нижние кронщтейны 19 первой и второй пары щлицевых валов
вместе с контактными колесами 22 и лыжами 25 с номощью гидроцилиндров 26 разворачиваются в сторону металлоконструкции, обеспечивая необходимый зазор для подъема и опускания контейнера. Остальные звенья следящей системы при это.м .своего положепия не меняют.
Подъе.м контейнера иа высоту более 200 мм и его опускание осуществляются водителем через ручное управление. Установка нижних
ми 22 и лыжами 25 в рабочее положение осуществляется после освобождения захвата от контейнера.
Предмет изобретения
1. Контейнеровоз, содержащ-ий тележку, на которой смонтированы подвижные опорная и рабочая рамы, на последней из которых установлены замки для захвата контейнера, и онорно-поворотное устройство, отличающийся тем, что, с целью новыпления точности установки контейнера .на контейнеровозе, рабочая рама снабжена следящим механизмом, выполненным в виде 1ННЖНИХ направляющих шарнирных лыж с роликами и верхних роликов, связанных с рабочей рамой.
2.Контейнеровоз по п. 1, отличающийся тем, что верхние ролики установлены на крони1тейнах, соединенных с вертикальными щлицевыми валами.
3.КонтеЙ1геровоз по inn. 1 и 2, отличающийся тем, что, .с пелью опускания .коптейнера второго яруса до уров)1я пола, на правляющие шарнир1гые лыжи следящего механизма установлены носредством кронштейнов на шлицевых валах и соединены с гидроцилиндрами.
4.Контейнеровоз но п. 1, отличающийся тем, что рабочая рама соединена посредством гидроцилиндра с нодвижной в поперечном направлении рамой, связанной с шарнирными гидроцилиндрами, расположенными по обе стороны онорно-новоротного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров | 1975 |
|
SU575248A1 |
| ТЕЛЕЖКА-НОСИТЕЛЬ | 2005 |
|
RU2309077C2 |
| ЛЕНТОЧНОШЛИФОВАЛЬИЫЙ СТАНОК | 1972 |
|
SU327991A1 |
| МАШИНА ДЛЯ РЫТЬЯ ТРАНШЕЙ | 1966 |
|
SU184732A1 |
| Ленточно-шлифовальный станок для обра-бОТКи НАРужНОй пОВЕРХНОСТи длиННОМЕРНыХТРуб СлОжНОгО пРОфиля | 1979 |
|
SU818827A1 |
| Устройство для перегрузки изделий с одного конвейера на другой | 1984 |
|
SU1273318A1 |
| УСТРОЙСТВО для УКЛАДКИ в СТОПУ плоских | 1973 |
|
SU393177A1 |
| Плодоуборочная машина | 1983 |
|
SU1143340A1 |
| Гидравлический подъемник для приемапередачи груза с канатной дороги | 1972 |
|
SU483340A1 |
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
2
фиг 3
11
35
1 f
54
19
-31
(C
