Изобретение относится к машиностроению и может быть использовано в устройствах, предназначенных для сочленения и привода звеньев манипуляторов, применяемых для выполнения строительно-монтажных, подъемнотранспортных и других технологических операций.
По основному авт. св. № 393083 известен механизм шарнира манипулятора, включающий корпус, с шарнирно установленной крестовиной, шарнирные приводные звенья переменной длины и исполнительное звено.
Цель изобретения - увеличение зоны досягаемости при маневрировании исполнительным звеном и предотвраш,ение поворота исполнительного звена вокруг его продольной оси.
Это достигается тем, что между исполнительным звеном и приводными звеньями переменной длины смонтировано промежуточное звено, шарнирно соединенное с ними и с крестовиной и снабженное дополнительной крестовиной, один из образуюш,их стержней которой шарнирно укреплен на промежуточном звене, а другой также шарнирно - на исполнительном звене, связанном шарирно с промежуточным звеном дополнительными звеньями переменной длины. Оси основной и дополнительной крестовин, закрепленные на промежуточном звене, параллельны между собой и
смеш,ены на величину, обеспечиваюшую взаимный поворот, а шарниры основных и дополнительных звеньев переменной длины, установленные на промел уточном звене, соответственно размеш,ены друг против друга в плоскостях, перпендикулярных к продольной оси промежуточного звена и проходяших через центры одноименных крестовин.
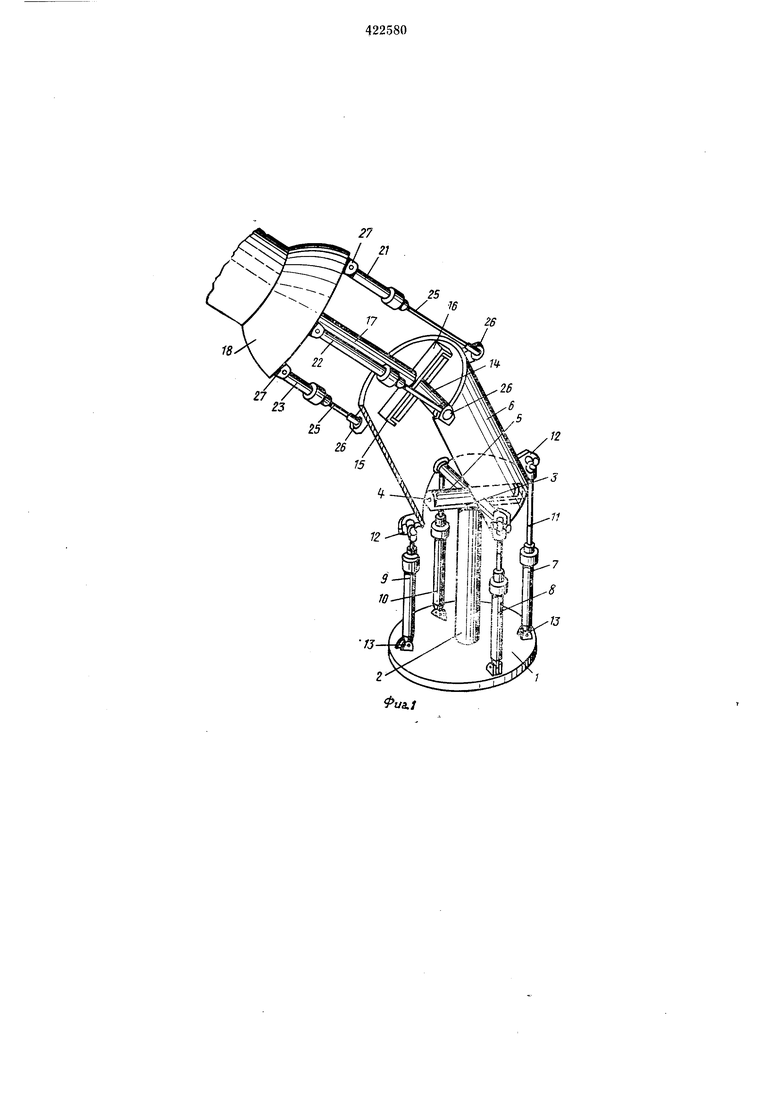
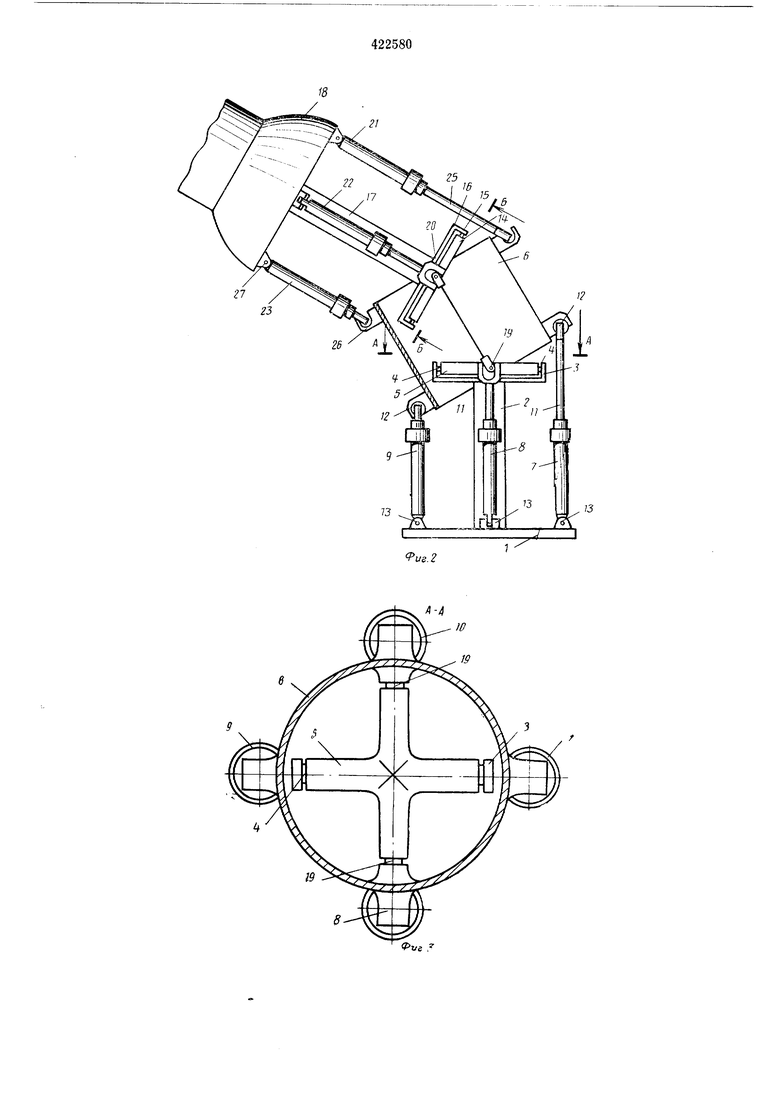
На фиг. 1 показан предлагаемый механизм шарнира манипулятора, обпи1Й вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез по А-А на фиг. 2; на фиг. 4-разрез по Б-Б на фиг. 2.
Механизм шарнира манипулятора состоит из корпуса, включаюшего основание 1, стержень 2 и кронштейн 3, в котором на осях 4 установлена поворотная крестовина 5, шарнирно соединенная с промежуточным звеном 6. Основание 1 корпуса -и промежуточное звено 6 шарнирно связаны между собой приводными звеньями переменной длины, выполненными в виде гидроцилиндров 7, 8, 9 и 10 со штоками 11, которые при помоши сферических шарниров 12 соединены с промежуточным звеном 6, а гидроцилиндры 7-10 - с основанием 1 корпуса посредством сферических шарпиров 13.
Промежуточное звено 6 имеет дополнительную крестовину 14, один из образующих стержней крестовины шарнирно закреплен на промежуточном звене 6, а другой с номощью осей 15 - в кронштейне 16, который жестко закренлен на стержне 17, являющимся частью иснолнительного звена 18. Оси 19 и 20 основной и дополнительной крестовин 5 и 14, закрепленных на промежуточном звене 6, параллельны между собой и смещены на величину, обеспечивающую взаимный поворот крестовин 5 и 14. Промежуточное звено 6 связано с исполнительным звеном 18 дополнительными звеньями переменной длины, выполненными в виде гидроцилидров 21, 22, 23 к 24 и штоков 25, которые присоединены к промежуточному звену 6 сферическими щарнирами 26, а корпуса гидроцилиндров 21-24 - к исполнительному звену 18 также сферическими шарнирами 27. Сферические шарниры 12 и 26, размещенные на промежуточном звене 6, соответственно установлены друг нротив друга в плоскостях, перпендикулярных продольной оси промежуточного звена 6 и проходящих через центры крестовин 5 и 14. Механизм шарнира манипулятора работает следующим образом. В исходном положении все гидроцилиндры 7-10, а также 21-24 закрыты системой управления (не показана). Поворот исполнительного звена 18 в заданное положение, например в плоскости чертежа влево, (фиг. 2) осуществляется следующим образом. Рабочую жидкость в равных количествах одновременно подают в порщневые полости гидроцилиндров 7, 21 ив штоковые полости гидроцилиндров 9, 23. При этом гидроцилиндры 8, 9 и 22, 24 закрыты, промежуточное звено 6 поворачивается относительно оси 19 крестовины 5 влево на заданный угол и одновременно также влево исполнительного звена 18 относительно оси 20 крестовины 14 в той же плоскости и на тот же угол. Суммарный поворот исполнительного звена 18 относительно корпуса 1 произойдет на двойной угол. Аналогичным образом исполнительное звено поворачивается вправо, а также в плоскости, перпендикулярной плоскости чертежа. Во всех этих случаях разворот промежуточного звена 6 и исполнительного звена 18 отсутствует, так как поворот осуществляется вокруг осей 19, 20 или 4, 15 и механизм работает как одноповоротный шарнир. При необходимости поворота исполнительного звена 18 в плоскости, размещенной к плоскости чертежа под углом не равным 90°, жидкость одновременно подают во все гидроцилиндры, а величина угла наклона будет зависеть от соотнощения количества подаваемой жидкости в определенные гидроцилиндры. При этом промежуточное звено 6 и исполнительное звено 18 поворачиваются одновременно на двух осях 4, 19 и 15, 20 и разворачиваются вокруг собственных продольных осей на величину, зависящую от направления и величины угла поворота. Конструктивное исполнение предлагаемого механизма и подача одинакового количества рабочей жидкости в соответствующие гидроцилиндры обеспечивают отсутствие разворота исполнительного звена 18 относительно корпуса 1 в связи с тем, что звено 6 разворачивается относительно корпуса 1 в одну сторону, а исполнительное звено 18 - на такой же угол в обратную сторону. Следовательно, абсолютный разворот исполнительного звена 18 относительно корпуса 1 будет равен нулю, т. е. разворота звена 18 относительно корпуса 1 не будет. Предмет изобретения Механизм шарнира манипулятора по авт. св. № 393083, отличающийся тем, что, с целью увеличения сферы досягаемости и предотвращепия поворота иснолнительного звена вокруг его продольной оси при маневрировании, между исполнительным звеном и приводными звеньями переменной длины смонтировано промежуточное звено, шариирно соединенное с ними и с крестовиной и снабженное дополнительной крестовиной, один из образующих стержней которой шарнирно укреплен на промежуточном звене, а другой также шарнирно - на исполнительном звене, связанном шарнирно с промежуточным звеном дополнительными звеньями переменной длины, при этом оси основной и дополнительной крестовин, закрепленные на промежуточном звене, параллельны между собой и смещены на величину, обеспечивающую их взаимный поворот, а шарниры основных и дополнительных звеньев переменной длины на промежуточном звене установлены соответственно друг против друга в плоскостях, перпендикулярных к продольной оси промежуточного звена и проходящих через центры одноименных крестовин.
25
75
6
.2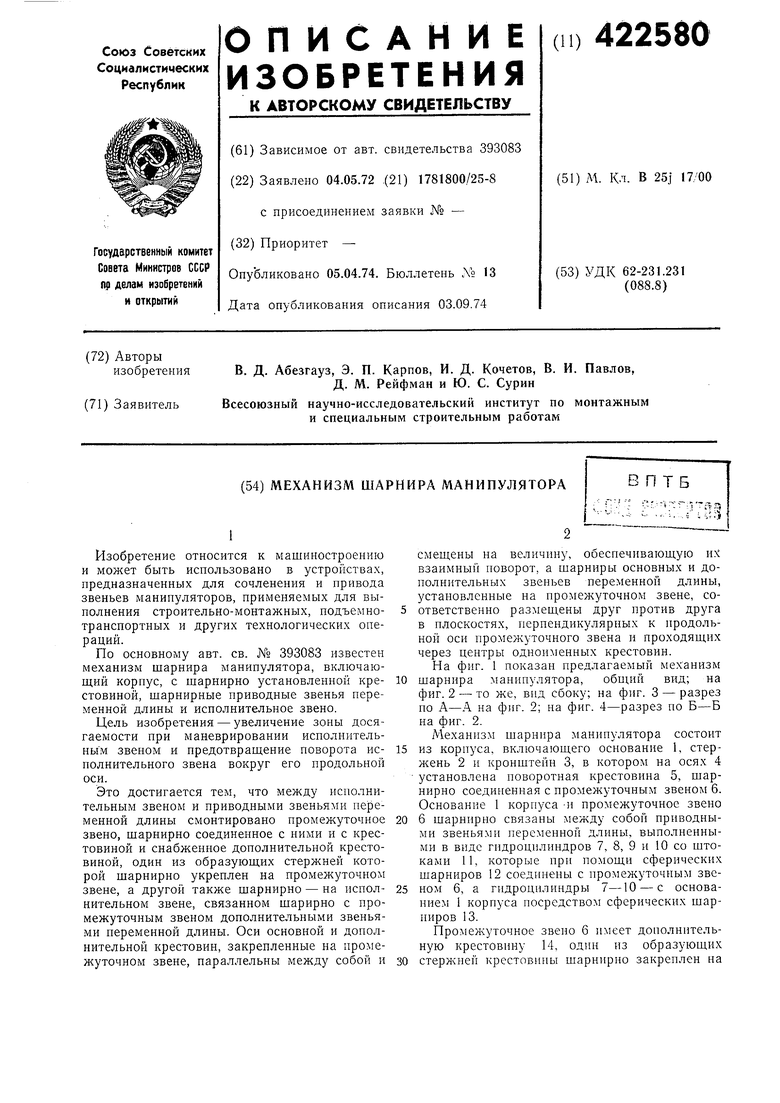

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРА | 1973 |
|
SU393083A1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ПЕРЕКЛЮЧАТЕЛЬ | 1972 |
|
SU427413A1 |
| ЗАПЯСТЬЕ МАНИПУЛЯТОРА | 1972 |
|
SU428934A1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| МЕХАНИЗМ НАВЕСКИ ВАЛКОВОЙ ЖАТКИ | 1973 |
|
SU395039A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
| Манипулятор | 1984 |
|
SU1273243A1 |
8
24
20
П
