1
Изобретение относится к оборудованию для химической обработки изделий, широко применяемому в электронной и полупроводниковой промышленности. Оно может быть использовано, например, при химической обработке кремниевых и ситалловых пластин.
Известен полуавтомат химического вибротравления переходов полупроводниковых приборов, содержащий маазин загрузки, привод, камеры химической обработки, линейно расположенные на вибрационной платформе в соответствии с операциями технологического процесса, и отсекатель. По наклонному лотку магазина загрузки кассеты с обрабатываемыми изделиями под действием гравитационных сил поступают в первую вибрационную камеру химической обработки, выполненную в виде наклонного лотка, заполняемого жидкостным реактивом. Поднимаясь по наклонному лотку первой камеры химической обработки и соскальзывая с него, кассеты с обрабатываемыми изделиями попадают в следующую аналогичную камеру химической обработки изделий. С последней камеры химической обработки кассеты с изделиями направляются на неподвижный наклонный лоток, с которого они соскальзывают под действием Гравитационных сил. Отсекатели, расположенные в камерах химической обработки вдоль полуавтомата, регламентируют пребывание
кассет на рабочих позициях в соответствии с технологическим временем.
Недостатками известного автомата химической обработки изделий являются сложность
и большие габариты из-за наличия системы отсекателей и определенного (допустимого) угла подъема вибрационных лотков; отсутствие герметизации камер химической обработки и поэтому невозможность химической обработки в одном устройстве разными реактивами, например органическими веществами и кислотой; отсутствие кистевой мойки обрабатываемых изделий, что необходимо, например, при химической обработке поверхности полупроводниковых пласгин.
Предложенный автомат химической обработки изделий отличается от известных тем, что камеры химической обработки снабжены цилиндрическими дисками с кистями на боковых поверхностях, касающимися обрабатываемых изделий, примем цилиндрические диски расположены вертикально между обрабатываемыми изделиями в призматических опорах, а вращение цилиндрических дисков вокруг горизонтальной оси обеспечивается действием прямолинейно направленных сил вибрации в вертикальной и горизонтальной плоскостях. Это позволяет производить объемную жидкостную обработку изделий с применением
кистей в одной камере химической обработки.
что расширяет технологические возможности автомата.
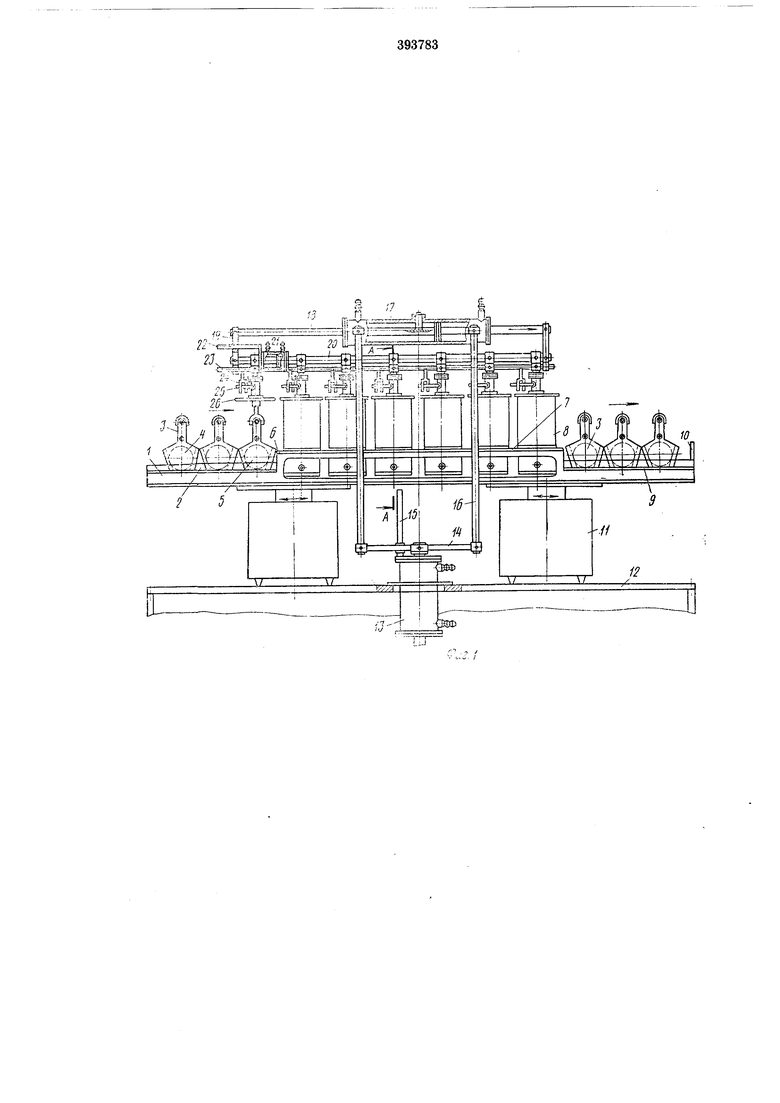
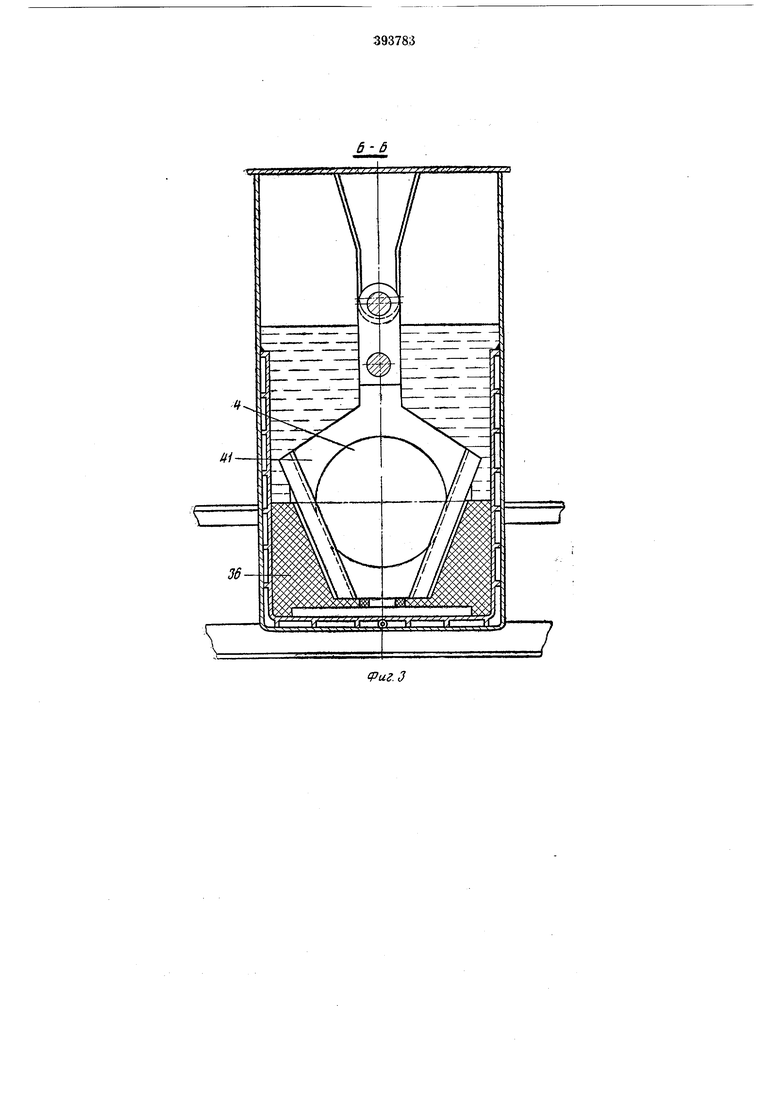
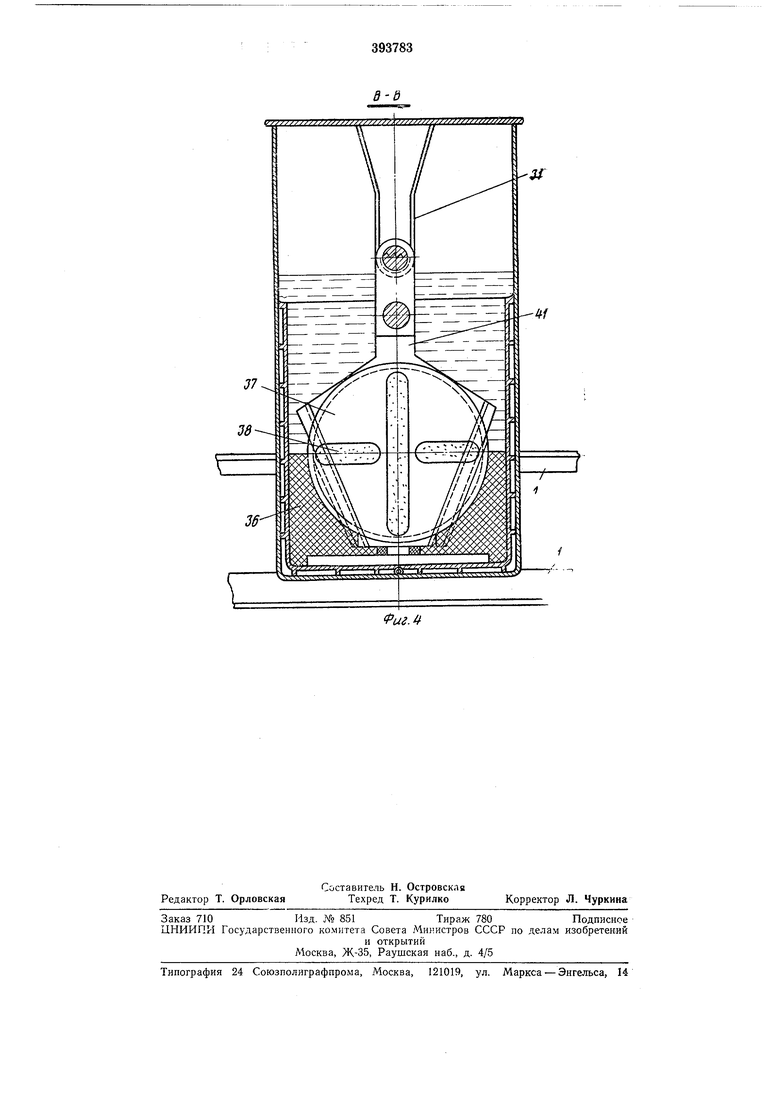
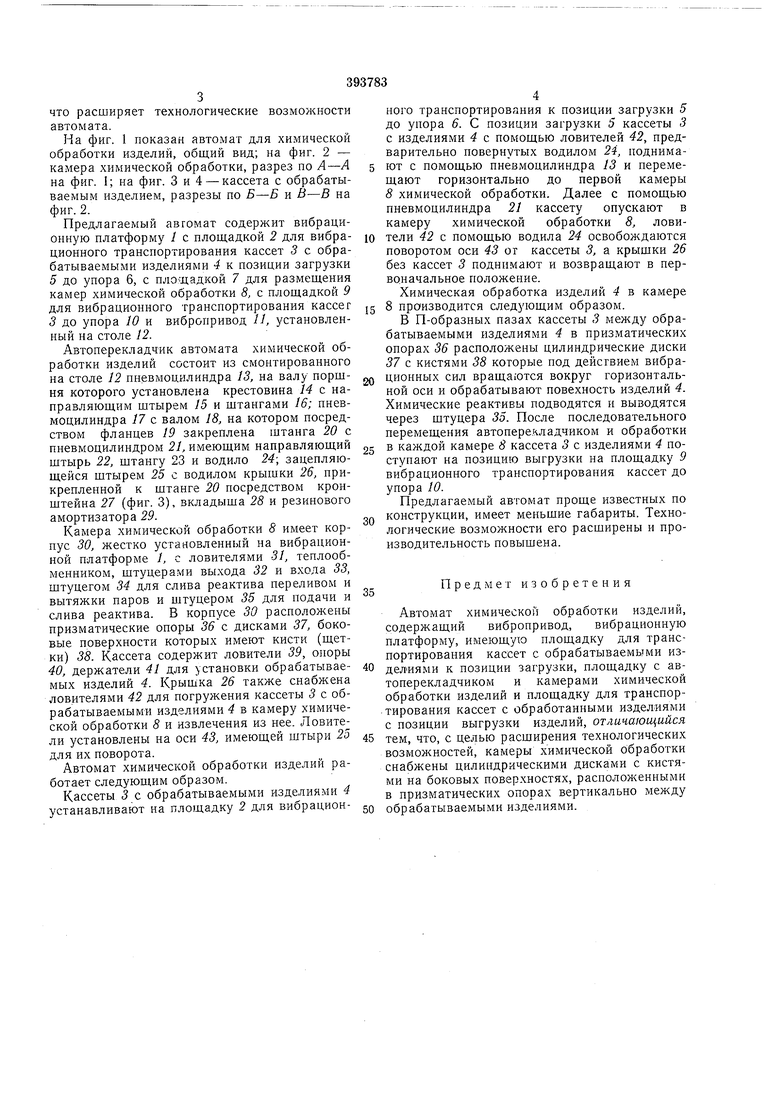
На фиг. 1 показан автомат для химической обработки изделий, общий вид; на фиг. 2 - камера химической обработки, разрез по А-А на фиг. 1; на фиг. 3 и 4 - кассета с обрабатываемым изделием, разрезы по Б-Б и В-В на фиг. 2.
Предлагаемый авгомат содержит вибрационную платформу 1 с площадкой 2 для вибрационного транспортирования кассет 3 с обрабатываемыми изделиями 4 к позиции загрузки 5 до упора 6, с площадкой 7 для размещения камер химической обработки 8, с площадкой 9 для вибрационного транспортирования кассег 3 до упора 10 и вибропривод //, установленный на столе 12.
Автоперекладчик автомата химической обработки изделий состоит из смонтированного на столе 12 пневмоцилиндра 13, на валу порщня которого установлена крестовина 14 с направляющим штырем 15 и штангами 16; пневмоцилиндра 17 с валом 18, на котором посредством фланцев 19 закреплена штанга 20 с пневмоцилиндром 2/ имеющим направляющий щтырь 22, штангу 23 и водило 24; зацепляющейся штырем 25 с водилом крышки 26, прикрепленной к штанге 20 посредством кронштейна 27 (фиг. 3), вкладыша 28 и резинового амортизатора 29.
Камера химической обработки 8 имеет корпус 30, жестко установленный на вибрационной платформе /, с ловителями 31, теплообменником, штуцерами выхода 32 и входа 33, штуцегом 34 для слива реактива переливом и вытяжки паров и штуцером 35 для подачи и слива реактива. В корпусе 30 расположены призматические опоры 36 с дисками 37, боковые поверхности которых имеют кисти (шетки) 38. Кассета содержит ловители 39, опоры 40, держатели 41 для установки обрабатываемых изделий 4. Крышка 26 также снабжена ловителями 42 для погружения кассеты 5 с обрабатываемыми изделиями 4 в камеру химической обработки 8 и извлечения из нее. Ловители установлены на оси 43, имеющей штыри 25 для их поворота.
Автомат химической обработки изделий работает следующим образом.
Кассеты 3 с обрабатываемыми изделиями 4 устанавливают на площадку 2 для вибрационного транспортирования к позиции загрузки 5 до упора 6. С позиции загрузки 5 кассеты 3 с изделиями 4 с помощью ловителей 42, предварительно повернутых водилом 24, поднимают с помощью пневмоцилиндра 13 и перемещают горизонтально до первой камеры 8 химической обработки. Далее с помощью пневмоцилиндра 21 кассету опускают в камеру химической обработки 8, ловители 42 с помощью водила 24 освобождаются поворотом оси 43 от кассеты 3, а крышки 26 без кассет 3 поднимают и возвращают в первоначальное положение. Химическая обработка изделий 4 в камере
8 производится следующим образом.
В П-образных пазах кассеты 3 между обрабатываемыми изделиями 4 в призматических опорах 36 расположены цилиндрические диски 37 с кистями 38 которые под действием вибрационных сил вращаются вокруг горизонтальной оси и обрабатывают повехность изделий 4. Химические реактивы подводятся и выводятся через штуцера 35. После последовательного перемещения автоперекладчиком и обработки
в каждой камере 8 кассета 5 с изделиями 4 поступают на позицию выгрузки на площадку 9 вибрационного транспортирования кассет до упора 10. Предлагаемый автомат проще известных по
конструкции, имеет меньшие габариты. Технологические возможности его расширены и производительность повышена.
Предмет изобретения
Автомат химической обработки изделий, содержащий вибропривод, вибрационную платформу, имеющую площадку для транспортирования кассет с обрабатываемыми изделиями к позиции загрузки, площадку с автоперекладчиком и камерами химической обработки изделий и площадку для транспортирования кассет с обработанными изделиями с позиции выгрузки изделий, отличающийся
тем, что, с целью расширения технологических возможностей, камеры химической обработки снабжены цилиндрическими дисками с кистями на боковых поверхностях, расположенными в призматических опорах вертикально между
обрабатываемыми изделиями.
л
: 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки в штыревую кассету деталей | 1983 |
|
SU1156897A1 |
| Автомат для индукционно-тепловой сборки неподвижных соединений | 1979 |
|
SU876352A1 |
| Устройство для сборки оксидно-полупроводниковых конденсаторов,механизм для установки изоляторов на выводы секций оксидно-полупроводниковых конденсаторов и механизм для установки шайб припоя в корпуса оксидно-полупроводниковых конденсаторов | 1983 |
|
SU1262586A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU1009692A1 |
| Устройство для автоматической сборки узлов | 1982 |
|
SU1134340A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Устройство для выгрузки радиодеталей из групповых кассет с канавками | 1990 |
|
SU1781857A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ | 1964 |
|
SU164766A1 |
| Способ сборки радиальных шариковых подшипников с углом заполнения шарами более 180 @ и устройство для его осуществления | 1978 |
|
SU1135933A1 |
| Устройство для пакетирования изделий с отверстиями | 1986 |
|
SU1337315A2 |